
电子神越女学 智能机器人原理与实践 ·传感器系统设计 骆德渊博士、教投 电子科技大学机械与电气工程学院副院长 电子科技大学机器人队总教练
1 传感器系统设计
德仓创机器人 Dechuang Robot 5.机器人传感器系统设计 概述 视觉 听觉 触觉 脑 行动 嗅觉 味觉 人靠眼睛(视觉)、耳朵(听觉)、皮肤(触觉)、舌头(味觉)、鼻子(嗅觉)感知环境、感知冷暖生活和美 好世界。机器人则依靠各种传感器感知工作环境,是机器人智能化水平的重要基础
5.机器人传感器系统设计 3 人靠眼睛(视觉)、耳朵(听觉) 、皮肤(触觉) 、舌头(味觉) 、鼻子(嗅觉)感知环境、感知冷暖生活和美 好世界。机器人则依靠各种传感器感知工作环境,是机器人智能化水平的重要基础。 概 述 视觉 听觉 触觉 嗅觉 味觉 大脑 行动
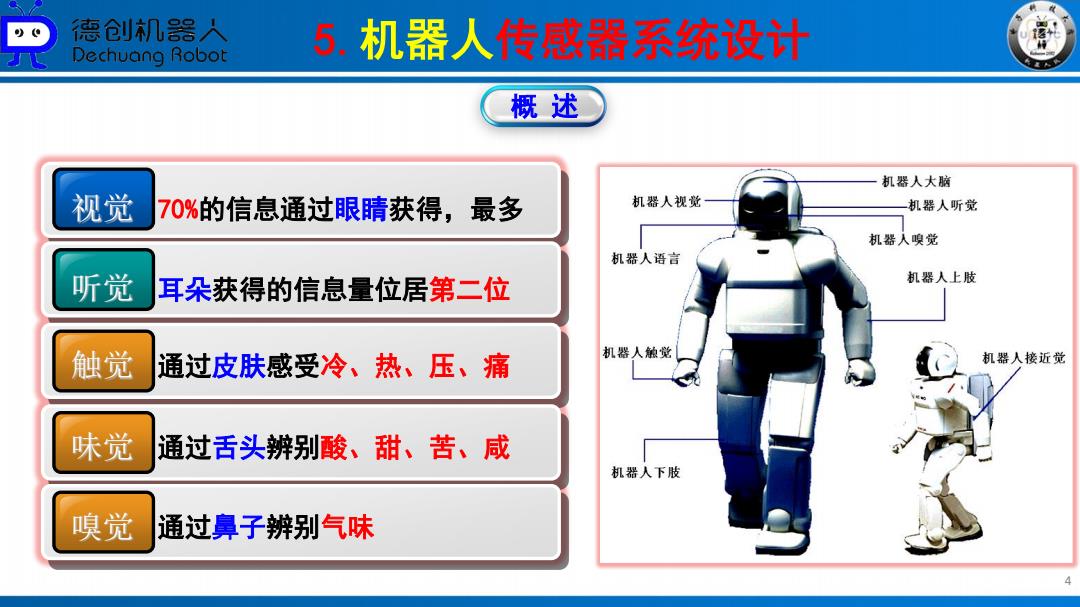
德仓创机器人 Dechuang Robot 5.机器人传感器系统设计 概述 机器人大脑 视觉 70%的信息通过眼睛获得,最多 机器人视觉 机器人听觉 机器人嗅党 机器人语言 听觉 耳朵获得的信息量位居第二位 机器人上肢 触觉 通过皮肤感受冷、热、压、痛 机器人触觉 机器人接近觉 味觉 通过舌头辨别酸、甜、苦、咸 机器人下肢 嗅觉 通过鼻子辨别气味
5.机器人传感器系统设计 4 概 述 视觉 70%的信息通过眼睛获得,最多 听觉 耳朵获得的信息量位居第二位 触觉 通过皮肤感受冷、热、压、痛 味觉 通过舌头辨别酸、甜、苦、咸 嗅觉 通过鼻子辨别气味
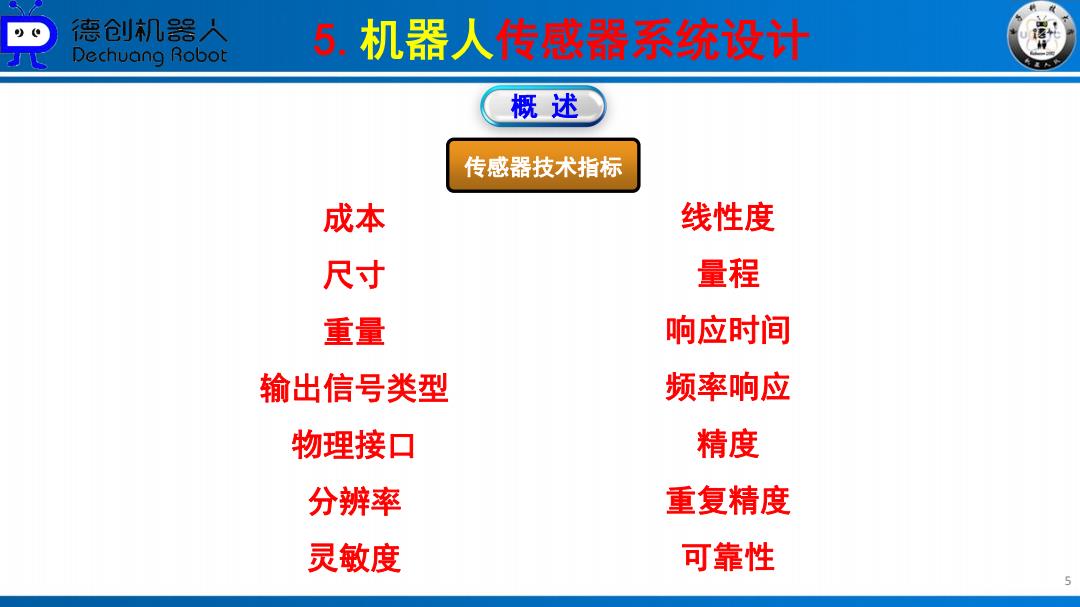
德仓创机器人 Dechuang Robot 5.机器人传感器系统设计 概述 传感器技术指标 成本 线性度 尺寸 量程 重量 响应时间 输出信号类型 频率响应 物理接口 精度 分辨率 重复精度 灵敏度 可靠性 5
5.机器人传感器系统设计 5 概 述 传感器技术指标 成本 尺寸 重量 输出信号类型 物理接口 分辨率 灵敏度 线性度 量程 响应时间 频率响应 精度 重复精度 可靠性
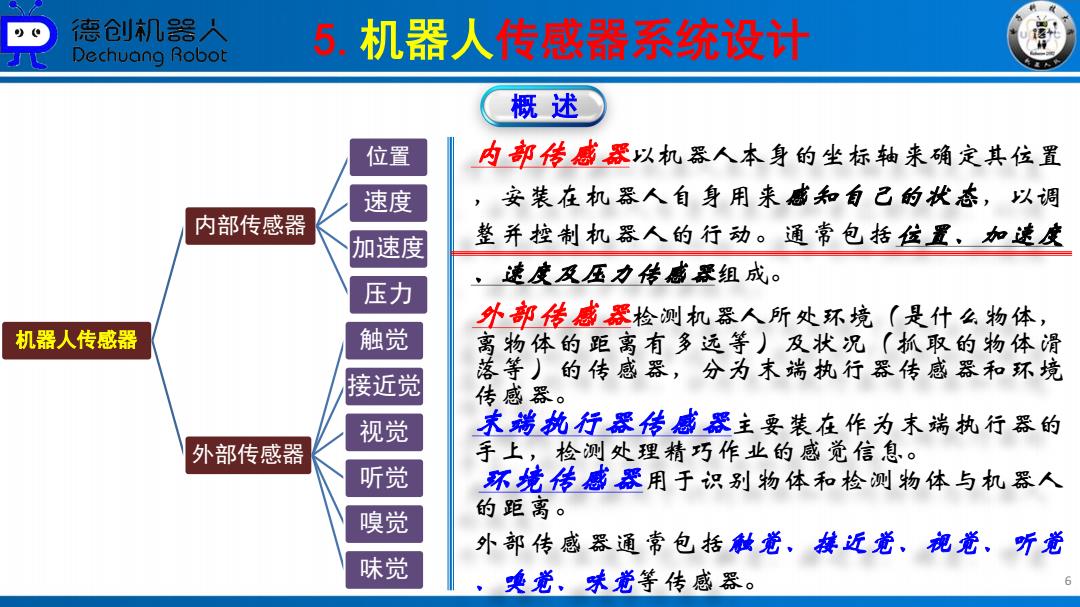
德仓创机器人 Dechuang Robot 5.机器人传感器系统设计 概述 位置 内部传感悉以机器人本身的坐标轴来确定其位置 速度 ,安装在机器人自身用来感知自己的状态,以调 内部传感器 加速度 整并控制机器人的行动。通常包括位置、加速度 速度及压力传感景组成。 压力 外部传感器检测机器人所处环境(是什么物体, 机器人传感器 触觉 离物体的距离有多远等)及状况(抓取的物体滑 接近觉 落等)的传感器,分为末端执行器传感器和环境 传感器。 视觉 末端执行器传感器主要装在作为末端执行器的 外部传感器 手上,检测处理精巧作业的感觉信息、。 听觉 环境传感器用于识别物体和检测物体与机器人 嗅觉 的距离。 外部传感器通常包括触觉、接近觉、视觉、听觉 味觉 、是觉、末觉等传感器
5.机器人传感器系统设计 6 概 述 机器人传感器 内部传感器 位置 速度 加速度 压力 外部传感器 触觉 接近觉 视觉 听觉 嗅觉 味觉 内部传感器以机器人本身的坐标轴来确定其位置 ,安装在机器人自身用来感知自己的状态,以调 整并控制机器人的行动。通常包括位置、加速度 、速度及压力传感器组成。 外部传感器检测机器人所处环境(是什么物体, 离物体的距离有多远等)及状况(抓取的物体滑 落等)的传感器,分为末端执行器传感器和环境 传感器。 末端执行器传感器主要装在作为末端执行器的 手上,检测处理精巧作业的感觉信息。 环境传感器用于识别物体和检测物体与机器人 的距离。 外部传感器通常包括触觉、接近觉、视觉、听觉 、嗅觉、味觉等传感器