
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统一液压驱动 电液伺服系统 电液伺服阀 电液伺服系统通过电气传动方式,将电气信号输入 系统来操纵有关的液压控制元件动作,控制液压执 行元件,使其跟随输入信号而动作,电液两部分都 采用电液伺服阀作为转换元件。 ☒w 9/心 回油进油 1-永久磁铁2、4-导磁体3-衔铁5-挡板6-喷嘴7-固定节流孔8-滤油器 1一电放大器2一电液同服阀3一液压缸4一机械手手臂5一齿轮齿条机构6一电位器7一步进电机 9-沿阀10-阀体11-反馈弹簧杆12-弹簧管13-线圈
4.羽毛球机器人运动控制系统设计 7 羽毛球机器人运动控制系统:驱动系统---液压驱动 电液伺服系统 电液伺服系统通过电气传动方式,将电气信号输入 系统来操纵有关的液压控制元件动作,控制液压执 行元件,使其跟随输入信号而动作,电液两部分都 采用电液伺服阀作为转换元件。 电液伺服阀
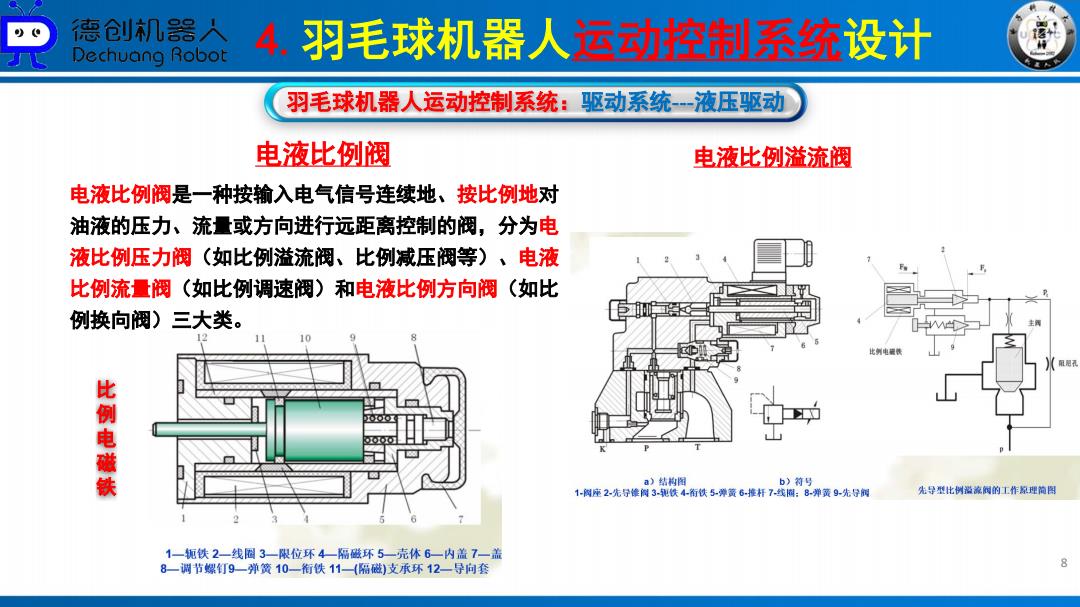
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统一液压驱动 电液比例阀 电液比例溢流阀 电液比例阀是一种按输入电气信号连续地、按比例地对 油液的压力、流量或方向进行远距离控制的阀,分为电 液比例压力阀(如比例溢流阀、比例减压阀等)、电液 比例流量阀(如比例调速阀)和电液比例方向阀(如比 例换向阀)三大类。 92 10 电 比例电磁铁 a)结构图 b》符号 1阀座2-先导维阁3-犯铁4-衔铁5-弹簧6-推杆7线阁:8-弹簧9-先导阀 先导型比例溢流阀的工作象理简图 1一轭铁2-线圈3一限位环4一隔磁环5一壳体6一内盖7一盖 8一调节螺钉9一弹簧10一衔铁11一(隔磁)支承环12一导向套
4.羽毛球机器人运动控制系统设计 8 羽毛球机器人运动控制系统:驱动系统---液压驱动 电液比例阀 电液比例阀是一种按输入电气信号连续地、按比例地对 油液的压力、流量或方向进行远距离控制的阀,分为电 液比例压力阀(如比例溢流阀、比例减压阀等)、电液 比例流量阀(如比例调速阀)和电液比例方向阀(如比 例换向阀)三大类。 电液比例溢流阀 比 例 电 磁 铁

90 德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统一液压驱动 电液比例方向节流阀 摆动缸 位移传感器 阀 阀体 0 M B P T 比例电磁铁 T A PB D( 6 T 带位移传感器的直动型比例方向节流阀
4.羽毛球机器人运动控制系统设计 9 羽毛球机器人运动控制系统:驱动系统---液压驱动 电液比例方向节流阀 摆动缸
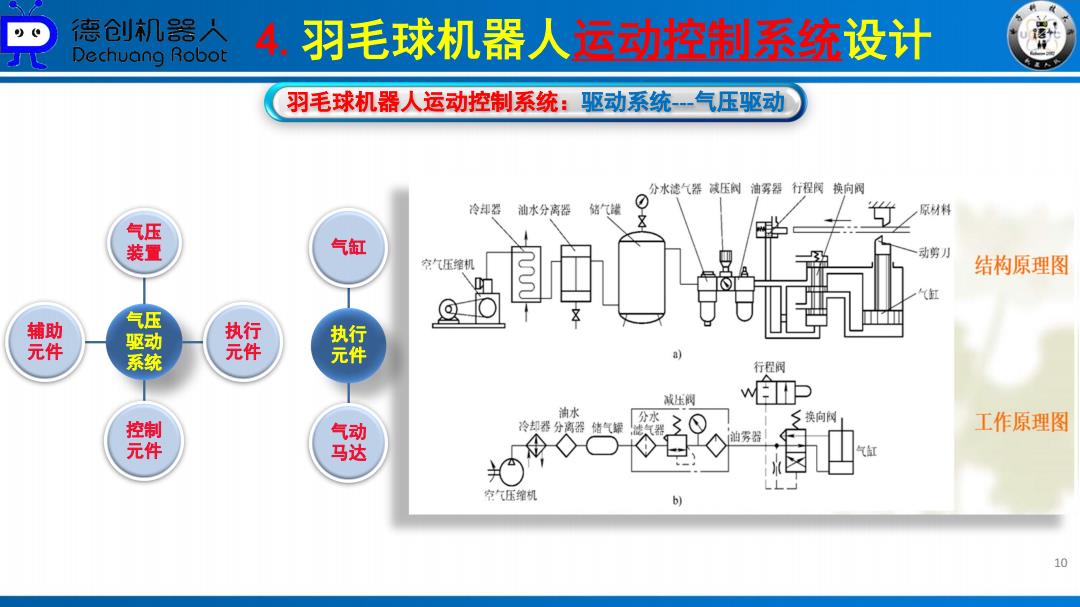
90 德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统一气压驱动 分水滤气器减压斜油雾器行程阀换向阀 冷却器 油水分离器钻气装 一原材料 气 量 气缸 动剪刀 究气压缩机 结构原理图 辅助 气压 驱动 执行 执行 元件 系统 元件 元件 行程阀 减出阀 w 油水 控制 气动 冷却器分离器储气胡 了换向 工作原理图 油雾器 元件 马达 山 空气压缩机 10
4.羽毛球机器人运动控制系统设计 10 羽毛球机器人运动控制系统:驱动系统---气压驱动 气压 驱动 系统 气压 装置 执行 元件 控制 元件 辅助 元件 执行 元件 气缸 气动 马达

德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统-电气驱动 转速高 短期 启动 位置控制 速度控制 转矩控制 过载 转矩大 位置指 位置比较P 限制电路 速度比较P 加减速 线性控 P 功率放人 电动机单元 机械传动 驱动 制性能 D 电机 -9 D 频繁 调速范 限量给定 速度环 检测 启停 围宽 位置环 机构 轴向 功率密 尺寸短 度高 11
4.羽毛球机器人运动控制系统设计 11 羽毛球机器人运动控制系统:驱动系统---电气驱动 驱动 电机 转速高 启动 转矩大 线性控 制性能 调速范 围宽 功率密 度高 轴向 尺寸短 频繁 启停 加减速 短期 过载