
电子神越女学 智能机器人原理与实践 导航与路径规划 骆德渊博士、教投 电子科技大学机械与电气工程学院副院长 电子科技大学机器人队总教练
1 导航与路径规划
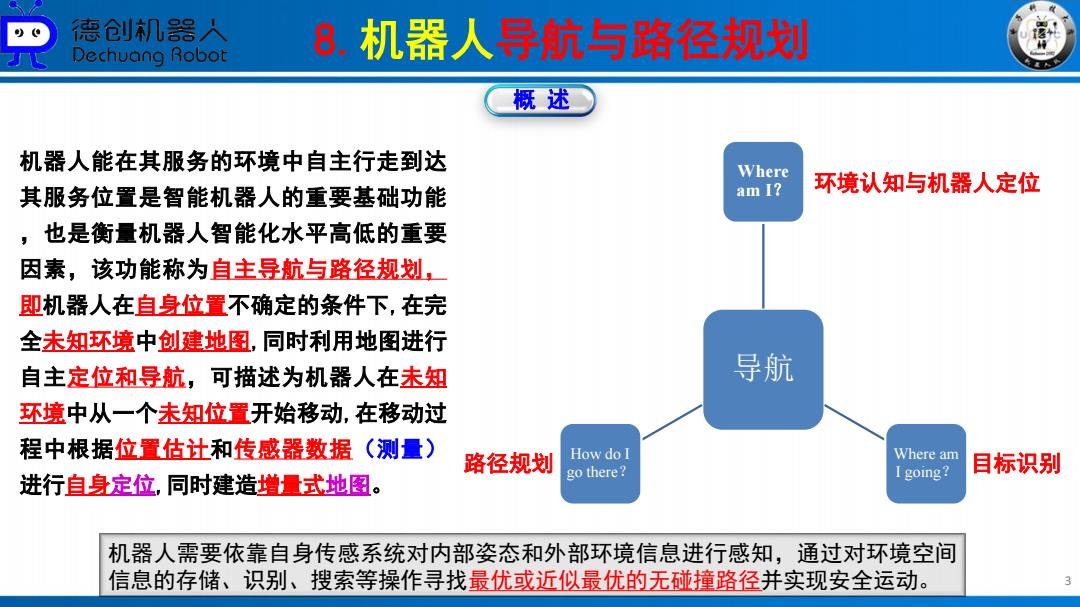
德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 概述 机器人能在其服务的环境中自主行走到达 Where am I? 环境认知与机器人定位 其服务位置是智能机器人的重要基础功能 ,也是衡量机器人智能化水平高低的重要 因素,该功能称为自主导航与路径规划, 即机器人在自身位置不确定的条件下,在完 全未知环境中创建地图,同时利用地图进行 自主定位和导航,可描述为机器人在未知 导航 环境中从一个未知位置开始移动,在移动过 程中根据位置估计和传感器数据(测量) 路径规划 How do I Where am go there? I going? 目标识别 进行自身定位,同时建造增量式地图。 机器人需要依靠自身传感系统对内部姿态和外部环境信息进行感知,通过对环境空间 信息的存储、识别、搜索等操作寻找最优或近似最优的无碰撞路径并实现安全运动
8.机器人导航与路径规划 3 机器人能在其服务的环境中自主行走到达 其服务位置是智能机器人的重要基础功能 ,也是衡量机器人智能化水平高低的重要 因素,该功能称为自主导航与路径规划, 即机器人在自身位置不确定的条件下,在完 全未知环境中创建地图,同时利用地图进行 自主定位和导航,可描述为机器人在未知 环境中从一个未知位置开始移动,在移动过 程中根据位置估计和传感器数据(测量) 进行自身定位,同时建造增量式地图。 导航 Where am I? Where am I going? How do I go there? 环境认知与机器人定位 路径规划 目标识别 机器人需要依靠自身传感系统对内部姿态和外部环境信息进行感知,通过对环境空间 信息的存储、识别、搜索等操作寻找最优或近似最优的无碰撞路径并实现安全运动。 概 述

德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 概述 磁导航 引导电缆 室内 陀螺仪 导航环境 惯性导航 室外 加速度计 导航分类 导航方式 基于地图的 结构化 导航 导航环境 非结构化 视觉导航 基于创建地 图的导航 卫星导航 无地图的导航
8.机器人导航与路径规划 4 导航环境 室内 室外 导航环境 结构化 非结构化 导航方式 磁导航 引导电缆 惯性导航 陀螺仪 加速度计 视觉导航 基于地图的 导航 基于创建地 图的导航 卫星导航 无地图的导航 导航分类 概 述

德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 概述 一一一摄像头 红外测距 测 目标位姿 初始位姿 传感器 超声测距 接受任务 全局路径 00】 规划 (x,%,8) 激光雷达 特征提取 构造地图 路径规 局部路径 规划 建 路径规划 地图匹配 参考轨迹 生成器 (y, 3,8,) 盔 车体运动 实时数据处理 控制器 民, (信息融合) SLAM u=(,2) 定位 建图 运动控制 车体动力 学补偿 位姿估计 车体 测量位姿、速度 运动学 x,y,8,v) 里程计
8.机器人导航与路径规划 5 接受任务 全局路径 规划 局部路径 规划 参考轨迹 生成器 车体运动 控制器 车体动力 学补偿 车体 运动学 里程计 位姿估计 实时数据处理 (信息融合) 地图匹配 特征提取 传感器 构造地图 红外测距 超声测距 激光雷达 摄像头 测量位姿、速度 目标位姿 初始位姿 0 0 0 ( , , ) x y ( , , , ) t t t t x y v 1 2 ( , ) v v 1 2 u v v ( , ) 1 2 ˆ ( , , ) x y ˆ ˆ ( , , , ) x y v ( , , ) c c c x y 路 径 规 划 运 动 控 制 测 量 定 位 建 图 定 位 建 图 路 径 规 划 SLAM 概 述

德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 概述 国地卡2、g四生 蜜收学知只 生过书 得在址十地行 2生eA 理料州人 1ag家在书2Ln队园 天化 生球填一 七n(线生一小物卡州时上种线中用一年上 量题 e维道 型不角 C出线化) 75里城无七》 超物经人意中位2以轨(地1 应用场 工性题人控中然国m生AGY的】 1生e心now达) 大果世u全■:宝a7华 SLAM知识对 aa、4 m 水达 公开收据编 单目T L se) Ert想1 》 PL生n件m2m口生 想e中omo时口生 用型开摩方聚 风卡7 物业知织 0 重电人七花5内1十》
8.机器人导航与路径规划 6 概 述 机器人自主导航与路径规划 涉及矩阵、李群代数、概率 与数理统计等数学知识;涉 及LINUX操作系统、ROS机器 人操作系统、开发环境等编 程环境;还涉及机器视觉等 机器人众多专业知识