
电子神越女学 智能机器人原理与实践 定位与视觉系统原理 略德渊博士、教授 电子科技大学机械与电气工程学院副院长 电子科技大学机器人队总教练
1 定位与视觉系统原理

德仓创机器人 Dechuang Robot 6.羽毛球机器人定位与视觉系统设计 羽毛球机器人实时定位系统是实时得到机器人在球场世界坐标系的位置,运动控制系统据此使机器人准确达到击球 点。由于羽毛球运动的快速性,要求羽毛球机器人定位系统具有实时性、高精度、误差无累积等特点。羽毛球机器 人定位属于室内移动机器人定位问题。 航迹推算法定位 航迹推算定位由陀螺仪、编码器及安装框架构成,属于相对定位方法,其短距离定位精度高、实时性好,但存在累积 误差,又称机器人全场定位模块。 航迹 推算法 机器人 定位 0 无线 视觉 定位 定位 全场定位模块 全场定位模块安装 全场定位模块位置坐标系统 3
6.羽毛球机器人定位与视觉系统设计 3 羽毛球机器人实时定位系统是实时得到机器人在球场世界坐标系的位置,运动控制系统据此使机器人准确达到击球 点。由于羽毛球运动的快速性,要求羽毛球机器人定位系统具有实时性、高精度、误差无累积等特点。羽毛球机器 人定位属于室内移动机器人定位问题。 机器人 定位 航迹 推算法 视觉 定位 无线 定位 航迹推算法定位 航迹推算定位由陀螺仪、编码器及安装框架构成,属于相对定位方法,其短距离定位精度高、实时性好,但存在累积 误差,又称机器人全场定位模块。 全场定位模块 全场定位模块安装 全场定位模块位置坐标系统
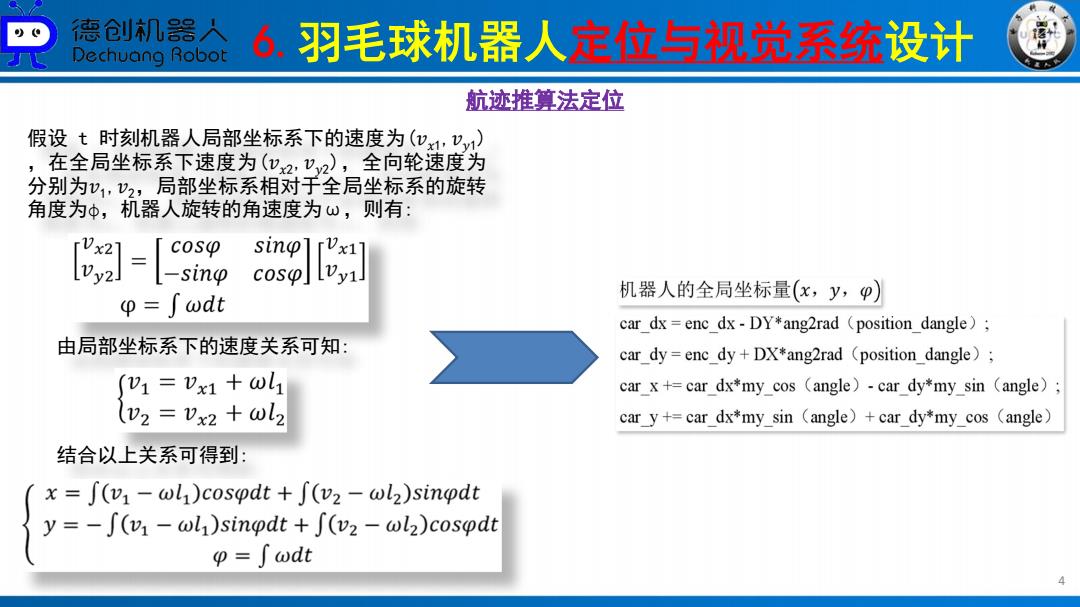
德仓创机器人 Dechuang Robot 6.羽毛球机器人定位与视觉系统设计 航迹推算法定位 假设t时刻机器人局部坐标系下的速度为(vx1,”y) ,在全局坐标系下速度为(v2,v2),全向轮速度为 分别为v1,v2,局部坐标系相对于全局坐标系的旋转 角度为Φ,机器人旋转的角速度为ω,则有: coso sinp Vx1 %2] -sin coso p=Jωdt 机器人的全局坐标量(x,y,p) car_dx=enc_dx-DY*ang2rad (position_dangle); 由局部坐标系下的速度关系可知: car_dy=enc_dy+DX*ang2rad (position dangle); V1=Vx1+ωL1 car x+=car dx*my cos (angle)-car dy*my sin (angle) (V2 Vx2 +@l2 car y+=car dx*my sin (angle)+car dy*my cos (angle) 结合以上关系可得到: x=∫(v1-ωl)cospdt+∫(v2-ωl2)sinpdt y=-∫(1-ωl1)sinpdt+∫(v2-ωl2)cospdt p=∫ωdt
4 航迹推算法定位 假设 t 时刻机器人局部坐标系下的速度为(𝑣𝑥1,𝑣𝑦1) ,在全局坐标系下速度为(𝑣𝑥2,𝑣𝑦2),全向轮速度为 分别为𝑣1,𝑣2,局部坐标系相对于全局坐标系的旋转 角度为ϕ,机器人旋转的角速度为ω,则有: 由局部坐标系下的速度关系可知: 结合以上关系可得到: 6.羽毛球机器人定位与视觉系统设计

德仓创机器人 Dechuang Robot 6.羽毛球机器人定位与视觉系统设计 航迹推算法定位一陀螺仪 陀螺仪是用来测量物体旋转加速度,经过后续处理还可以测量物体旋转速度与位移,主要是由一个位于轴心且可旋转 的轮子构成,多用于移动物体的导航与定位。按制作原理及结构大致分为机械式陀螺仪、光学陀螺仪、微机械陀螺仪 。机械式陀螺仪结构负责,速度测量范围窄:光学陀螺仪测量精度高、测量范围宽、稳定好、价格昂贵:微机械陀螺 仪体积小, 压电式 静电式 按驱动方式 电磁式 接检测方式 压电检测 电容检测 气中械 压阻式检测 光学检测 隧道效应检测 闭环模式 速率陀螺 地控年经 INHUANET 作模式 开环模式 速率积分陀螺 数码相机中 智能机器人中 整角模式
5 航迹推算法定位---陀螺仪 陀螺仪是用来测量物体旋转加速度,经过后续处理还可以测量物体旋转速度与位移,主要是由一个位于轴心且可旋转 的轮子构成,多用于移动物体的导航与定位。按制作原理及结构大致分为机械式陀螺仪、光学陀螺仪、微机械陀螺仪 。机械式陀螺仪结构负责,速度测量范围窄;光学陀螺仪测量精度高、测量范围宽、稳定好、价格昂贵;微机械陀螺 仪体积小、测量范围宽、精度高、价格适中。 MEMS 陀螺仪 体积小 重量轻 高 可靠性 大量程 低功耗 数字化 智能化 主要 参数 分辨率 零位 输出 灵敏度 量程 零点 漂移 温度 漂移 6.羽毛球机器人定位与视觉系统设计
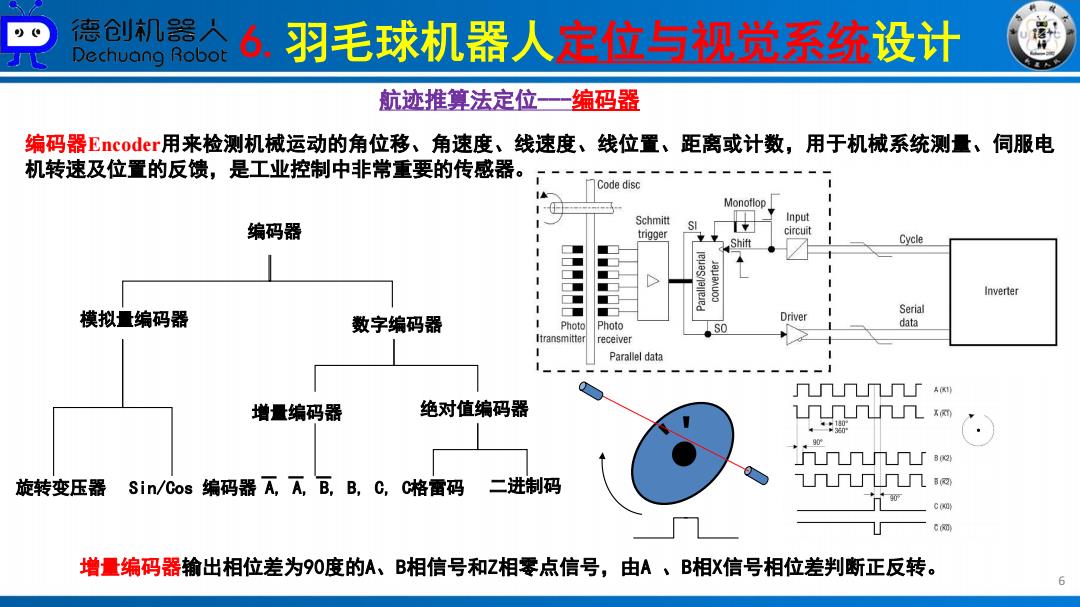
德创机器人 Dechuang Robot 6.羽毛球机器人定位与视觉系统设计 航迹推算法定位一一编码器 编码器Encoder用来检测机械运动的角位移、角速度、线速度、线位置、距离或计数,用于机械系统测量、伺服电 机转速及位置的反馈,是工业控制中非常重要的传感器。 Code disc Monotlop Input 编码器 Schmitt SI trigger circuit Cycle Inverter 模拟量编码器 ■ Serial 数字编码器 Driver Photo Photo data Itransmitter receiver 2 Parallel data 几几几几几∫ 增量编码器 绝对值编码器 几几几几U网 旋转变压器 Sin/Cos编码器A,AB,B,C,c格雷码 二进制码 几几几几网 c网 增量编码器输出相位差为90度的A、B相信号和Z相零点信号,由A、B相X信号相位差判断正反转。 6
6.羽毛球机器人定位与视觉系统设计 6 航迹推算法定位---编码器 编码器Encoder用来检测机械运动的角位移、角速度、线速度、线位置、距离或计数,用于机械系统测量、伺服电 机转速及位置的反馈,是工业控制中非常重要的传感器。 编码器 模拟量编码器 数字编码器 旋转变压器 Sin/Cos 编码器 增量编码器 绝对值编码器 A, A, B, B, C, C _ _ _ 格雷码 二进制码 增量编码器输出相位差为90度的A、B相信号和Z相零点信号,由A 、B相X信号相位差判断正反转