
电子神越女学 人 智能机器人原理与实践 一…羽毛球视觉处理 骆德渊博士、教投 电子科技大学机械与电气工程学院副院长 电子科技大学机器人队总教练
1 羽毛球视觉处理

德仓创机器人 Dechuang Robot 7.羽毛球机器人视觉软件系统 软件系统架构 羽毛球机器人视觉系统运行在Vindows操作系统;QT交互界面;Visual Studio软件开发平台;HALCON图像处理算法处理平台, 结合相机驱动及$DK支持图像高速实时采集;通过高速无线数传与移动机器人进行同步通信、电池剩余电量监控与报警、移动机 器人状态监控;引用HALCON算子对相机进行内外参数标定;引用HALCON算子进行图像顶处理、识别羽毛球、跟踪羽毛球、 预测羽毛球落地点与击球时间,同时对移动机器人进行精确定位,周期性校正羽毛球位置。 羽毛球跟踪 羽毛球落点预测 机器人定位 图像采集 图像预处理 羽毛球识别 相机标定 同步通信 电池监控 机器人状态监测 QT Visual Studio HALCON 相机SDK WINDOWS操作系统
7.羽毛球机器人视觉软件系统 3 软件系统架构 WINDOWS操作系统 Visual Studio HALCON 相机SDK 图像采集 图像预处理 羽毛球识别 羽毛球跟踪 羽毛球落点预测 同步通信 电池监控 机器人状态监测 QT 相机标定 机器人定位 羽毛球机器人视觉系统运行在Windows操作系统;QT交互界面;Visual Studio软件开发平台;HALCON图像处理算法处理平台, 结合相机驱动及SDK支持图像高速实时采集;通过高速无线数传与移动机器人进行同步通信、电池剩余电量监控与报警、移动机 器人状态监控;引用HALCON算子对相机进行内外参数标定;引用HALCON算子进行图像预处理、识别羽毛球、跟踪羽毛球、 预测羽毛球落地点与击球时间,同时对移动机器人进行精确定位,周期性校正羽毛球位置

德仓创机器人 Dechuang Robot 7.羽毛球机器人视觉软件系统 图像采集与获取 图像采集与获取是羽毛球机器人视觉系统第一至关重要的步骤,稳定性与实时性是图像采集的主要指标。根据实际需要,正确选 择相机分辨率、相机最高帧率、镜头焦距、镜头分辨率,还要选择驱动支持HCON的相机。HLCO支持目前主流相机采集接口; 支持多种品牌的相机。 IEEE1394 ALLIED BASLER.7 0p 花m 雨 面线 USB3.0 Line Scan Camera ELTECO GENCCAM iDS: ,i【eutron Linx ■ matrox DIRECTX Vhkin USB2.0 Digital Camera HALCON Opteon Tattilo IMAGING SOURCE GigE Analog Camera 国内的大华,海康威视、大恒图像等公司的相机也支持HLCO。 Direct show GenlCam
7.羽毛球机器人视觉软件系统 4 图像采集与获取 图像采集与获取是羽毛球机器人视觉系统第一至关重要的步骤,稳定性与实时性是图像采集的主要指标。根据实际需要,正确选 择相机分辨率、相机最高帧率、镜头焦距、镜头分辨率,还要选择驱动支持HALCON的相机。HALCON支持目前主流相机采集接口; 支持多种品牌的相机。 HALCON IEEE1394 Line Scan Camera Digital Camera Analog Camera GenICam Direct show GigE USB2.0 USB3.0 国内的大华、海康威视、大恒图像等公司的相机也支持HALCON
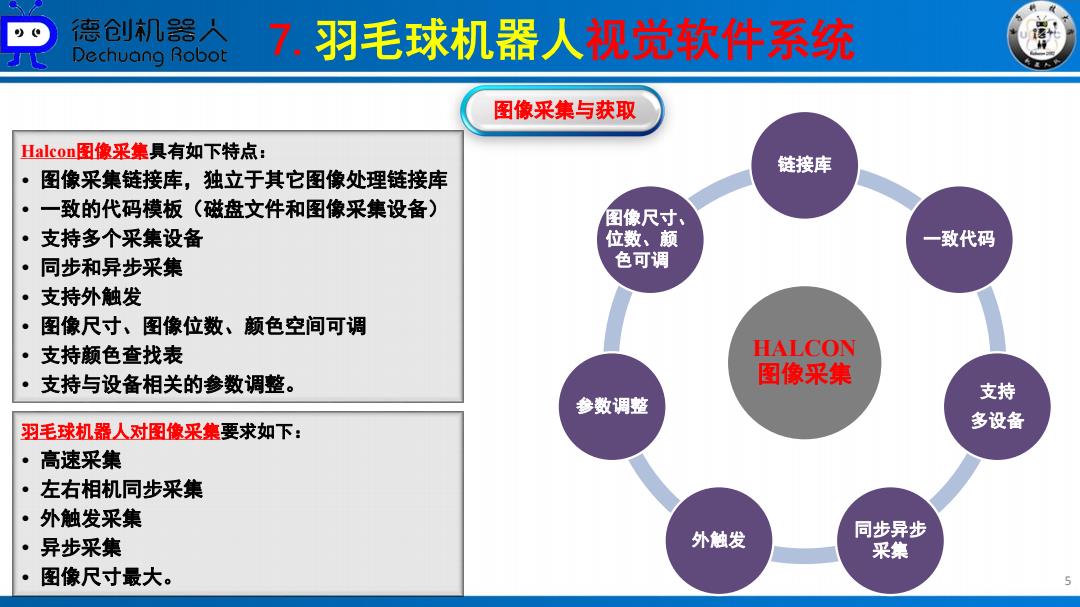
德仓创机器人 Dechuang Robot 7.羽毛球机器人视觉软件系统 图像采集与获取 Halcon图像采集具有如下特点: 链接库 ·图像采集链接库, 独立于其它图像处理链接库 ·一致的代码模板(磁盘文件和图像采集设备) 图像尺寸、 。支持多个采集设备 位数、颜 一致代码 ·同步和异步采集 色可调 。 支持外触发 。 图像尺寸、图像位数、颜色空间可调 。1 支持颜色查找表 HALCON ·支持与设备相关的参数调整。 图像采集 支持 参数调整 羽毛球机器人对图像采集要求如下: 多设备 高速采集 。左右相机同步采集 ·外触发采集 ·异步采集 外触发 同步异步 采集 ·图像尺寸最大。 5
7.羽毛球机器人视觉软件系统 5 图像采集与获取 HALCON 图像采集 链接库 一致代码 支持 多设备 同步异步 采集 外触发 参数调整 图像尺寸、 位数、颜 色可调 Halcon图像采集具有如下特点: • 图像采集链接库,独立于其它图像处理链接库 • 一致的代码模板(磁盘文件和图像采集设备) • 支持多个采集设备 • 同步和异步采集 • 支持外触发 • 图像尺寸、图像位数、颜色空间可调 • 支持颜色查找表 • 支持与设备相关的参数调整。 羽毛球机器人对图像采集要求如下: • 高速采集 • 左右相机同步采集 • 外触发采集 • 异步采集 • 图像尺寸最大
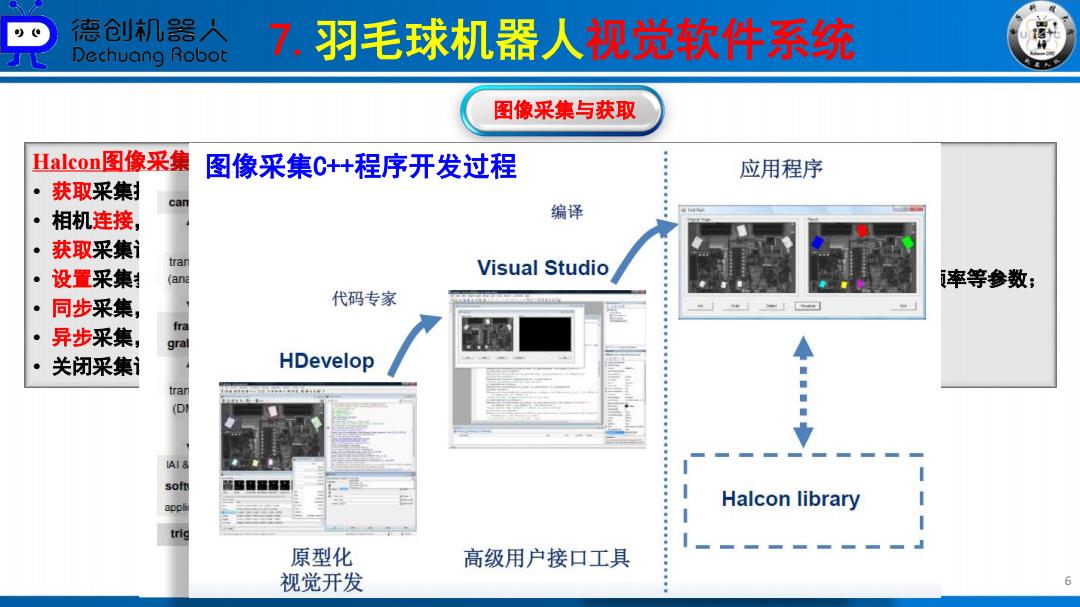
德仓创机器人 Dechuang Robot 7.羽毛球机器人视觉软件系统 图像采集与获取 Halcon图像采集 图像采集C+程序开发过程 应用程序 。 获取采集 相机连接, 编译 获取采集 tran 。 设置采集 Visual Studio 率等参数; 同步采集, 代码专家 异步采集, fra gral 关闭采集 HDevelop ■ trar D soft 国每福福福 Halcon library 原型化 高级用户接口工具 视觉开发 6
7.羽毛球机器人视觉软件系统 6 图像采集与获取 Halcon图像采集有如下几个过程: • 获取采集接口信息,Halcon算子:info_framegrabber (); • 相机连接,获得图像采集句柄,Halcon算子:open_framegrabber(); • 获取采集设备参数,Halcon算子:get_framegrabber_param(); • 设置采集参数,Halcon算子:set_framegrabber_param(),可以设置触发源、曝光时间、增益、采集频率等参数; • 同步采集,Halcon算子:grab_image(); • 异步采集,Halcon算子:grab_image _async() ; • 关闭采集设备, Halcon算子: close_framegrabber()。 同步采集 HALCON图像采集程序 异步采集 图像采集C++程序开发过程