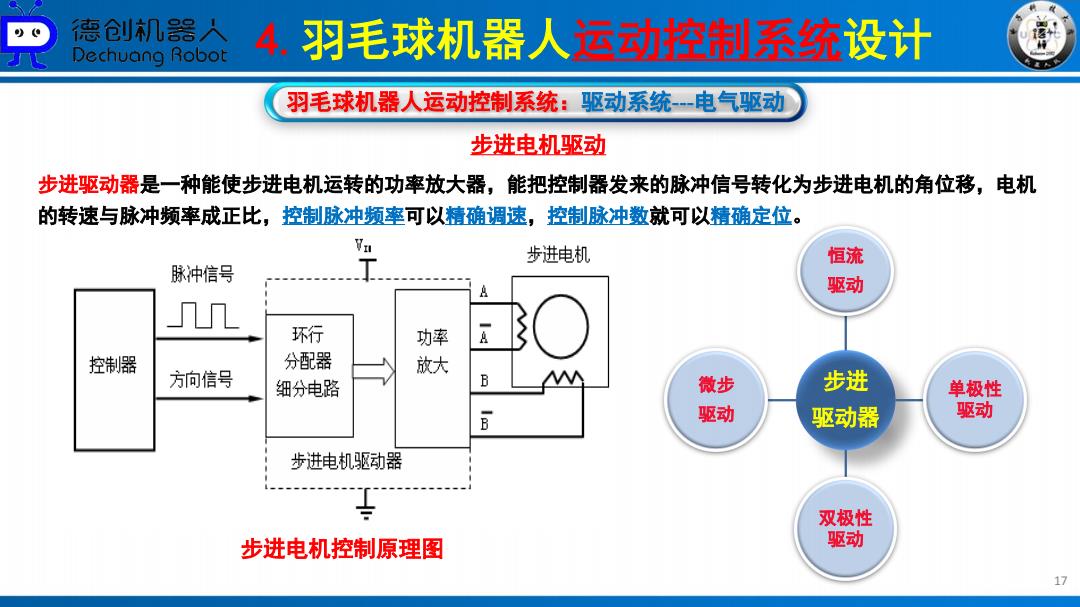
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统电气驱动 步进电机驱动 步进驱动器是一种能使步进电机运转的功率放大器,能把控制器发来的脉冲信号转化为步进电机的角位移,电机 的转速与脉冲频率成正比,控制脉冲频率可以精确调速,控制脉冲数就可以精确定位。 步进电机 恒流 脉冲信号 驱动 环行 功率 控制器 分配器 放大 方向信号 细分电路 B 微步 步进 单极性 B 驱动 驱动器 驱动 步进电机驱动器 双极性 步进电机控制原理图 驱动 17
4.羽毛球机器人运动控制系统设计 17 羽毛球机器人运动控制系统:驱动系统---电气驱动 步进电机驱动 步进驱动器是一种能使步进电机运转的功率放大器,能把控制器发来的脉冲信号转化为步进电机的角位移,电机 的转速与脉冲频率成正比,控制脉冲频率可以精确调速,控制脉冲数就可以精确定位。 步进电机控制原理图 步进 驱动器 恒流 驱动 单极性 驱动 双极性 驱动 微步 驱动
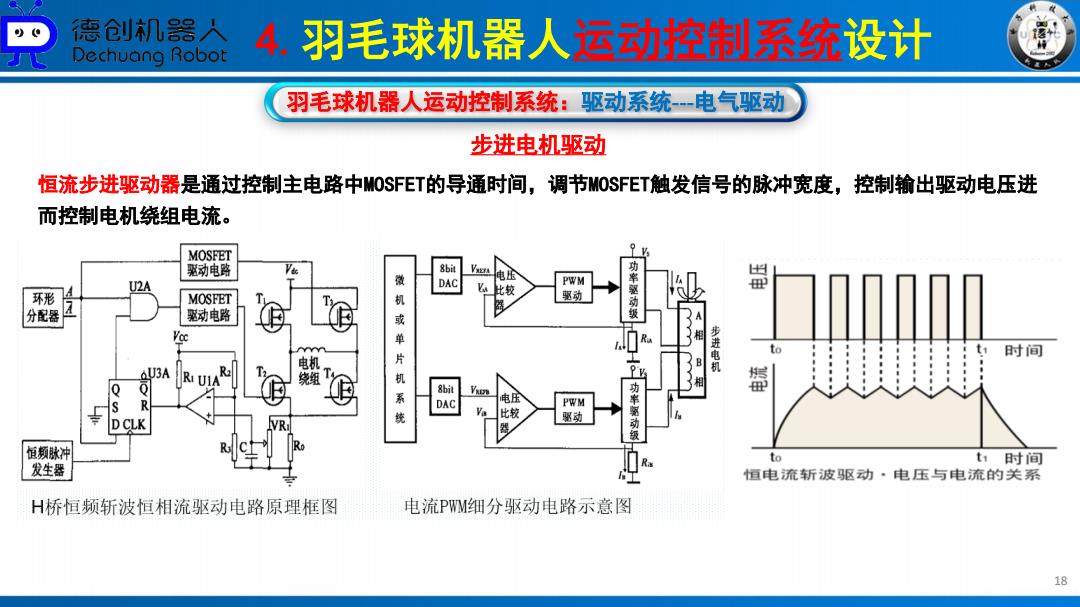
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统电气驱动 步进电机驱动 恒流步进驱动器是通过控制主电路中MOSFET的导通时间,调节MOSFET触发信号的脉冲宽度,控制输出驱动电压进 而控制电机绕组电流。 MOSFET 驱动电路 8bit 坦 U2A 微 电 DAC PWM 环形 MOSFET 比较 机 驱动 率驱动级 分配器 驱动电路 或 g 单 电机 片 电 to 时间 AU3A 绕组 机 Q 8bit 功 R DAC 电压 PWM D CLK 统 比较 驱动 器 率驱动级 恒颗脉冲 to t 时间 发生器 恒电流斩波驱动·电压与电流的关系 H桥恒频斩波恒相流驱动电路原理框图 电流PM细分驱动电路示意图 18
4.羽毛球机器人运动控制系统设计 18 羽毛球机器人运动控制系统:驱动系统---电气驱动 步进电机驱动 恒流步进驱动器是通过控制主电路中MOSFET的导通时间,调节MOSFET触发信号的脉冲宽度,控制输出驱动电压进 而控制电机绕组电流
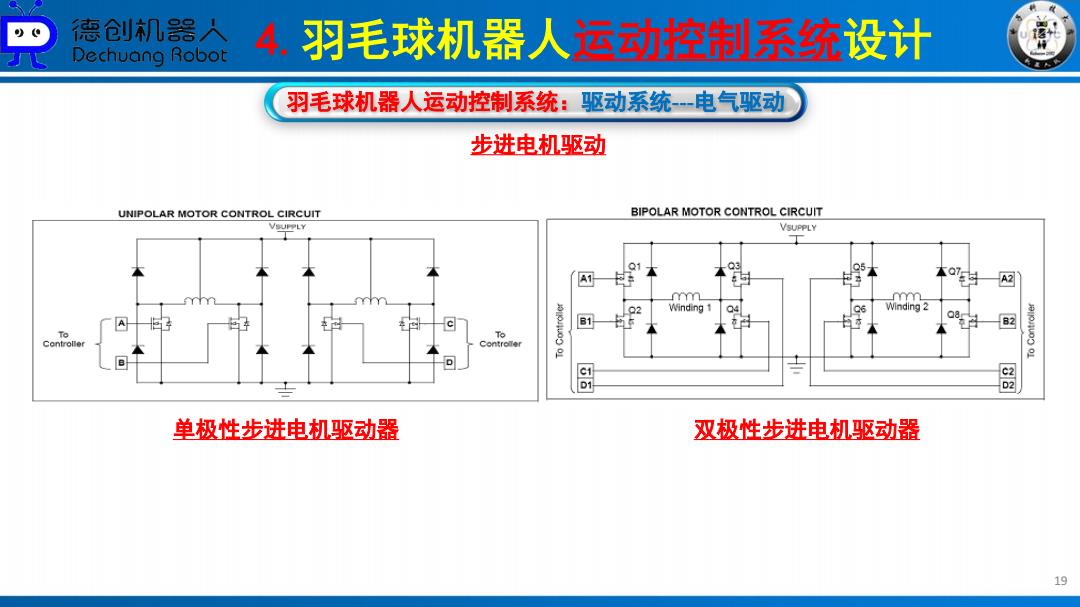
y0 德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统电气驱动 步进电机驱动 UNIPOLAR MOTOR CONTROL CIRCUIT BIPOLAR MOTOR CONTROL CIRCUIT VSUPPLY 91 A2 m 02 Winding 1 B1 82 To c2 D1 单极性步进电机驱动器 双极性步进电机驱动器 19
4.羽毛球机器人运动控制系统设计 19 羽毛球机器人运动控制系统:驱动系统---电气驱动 步进电机驱动 单极性步进电机驱动器 双极性步进电机驱动器
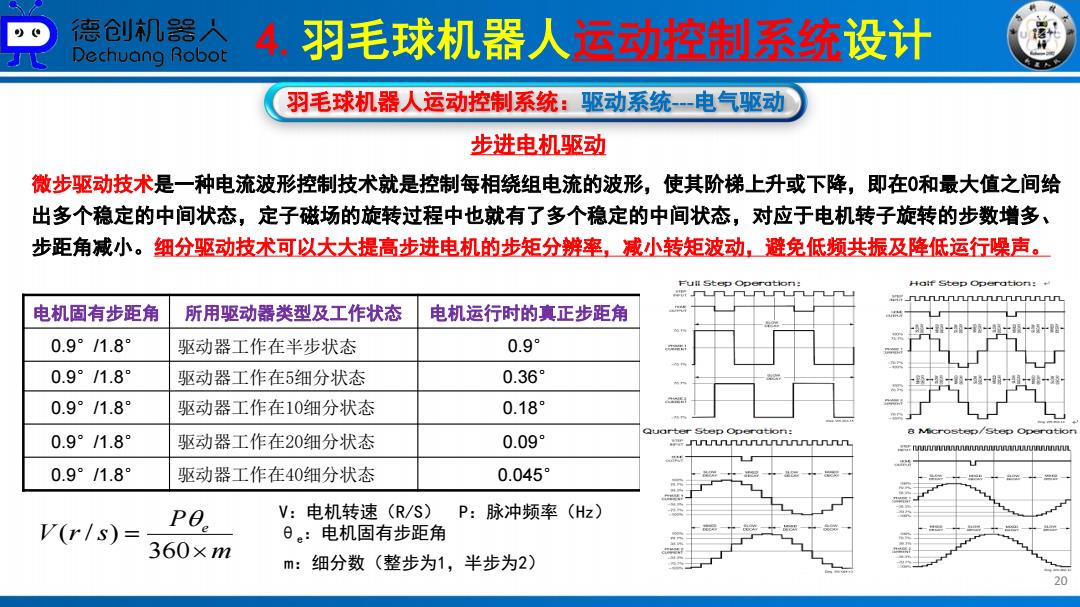
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统电气驱动 步进电机驱动 微步驱动技术是一种电流波形控制技术就是控制每相绕组电流的波形,使其阶梯上升或下降,即在0和最大值之间给 出多个稳定的中间状态,定子磁场的旋转过程中也就有了多个稳定的中间状态,对应于电机转子旋转的步数增多、 步距角减小。细分驱动技术可以大大提高步进电机的步矩分辨率,减小转矩波动,避免低频共振及降低运行噪声。 Fu鞋t Holf Step Op ration: 电机固有步距角 所用驱动器类型及工作状态 电机运行时的真正步距角 0.9°11.8° 驱动器工作在半步状态 0.9° 0.9°/1.8° 驱动器工作在5细分状态 0.36° 0.9°/1.8 驱动器工作在10细分状态 0.18 0.9°/1.8 uarter Step Operation: 驱动器工作在20细分状态 0.09° nnnnnnnnnnnnnnnn 0.9°11.8 驱动器工作在40细分状态 0.045° V(r/s)= P0。 V:电机转速(R/S) P:脉冲频率(Hz) 日。:电机固有步距角 360×m m:细分数(整步为1,半步为2)
4.羽毛球机器人运动控制系统设计 20 羽毛球机器人运动控制系统:驱动系统---电气驱动 步进电机驱动 微步驱动技术是一种电流波形控制技术就是控制每相绕组电流的波形,使其阶梯上升或下降,即在0和最大值之间给 出多个稳定的中间状态,定子磁场的旋转过程中也就有了多个稳定的中间状态,对应于电机转子旋转的步数增多、 步距角减小。细分驱动技术可以大大提高步进电机的步矩分辨率,减小转矩波动,避免低频共振及降低运行噪声。 电机固有步距角 所用驱动器类型及工作状态 电机运行时的真正步距角 0.9°/1.8° 驱动器工作在半步状态 0.9° 0.9°/1.8° 驱动器工作在5细分状态 0.36° 0.9°/1.8° 驱动器工作在10细分状态 0.18° 0.9°/1.8° 驱动器工作在20细分状态 0.09° 0.9°/1.8° 驱动器工作在40细分状态 0.045° m P V r s e 360 ( / ) V:电机转速(R/S) P:脉冲频率(Hz) θe:电机固有步距角 m:细分数(整步为1,半步为2)
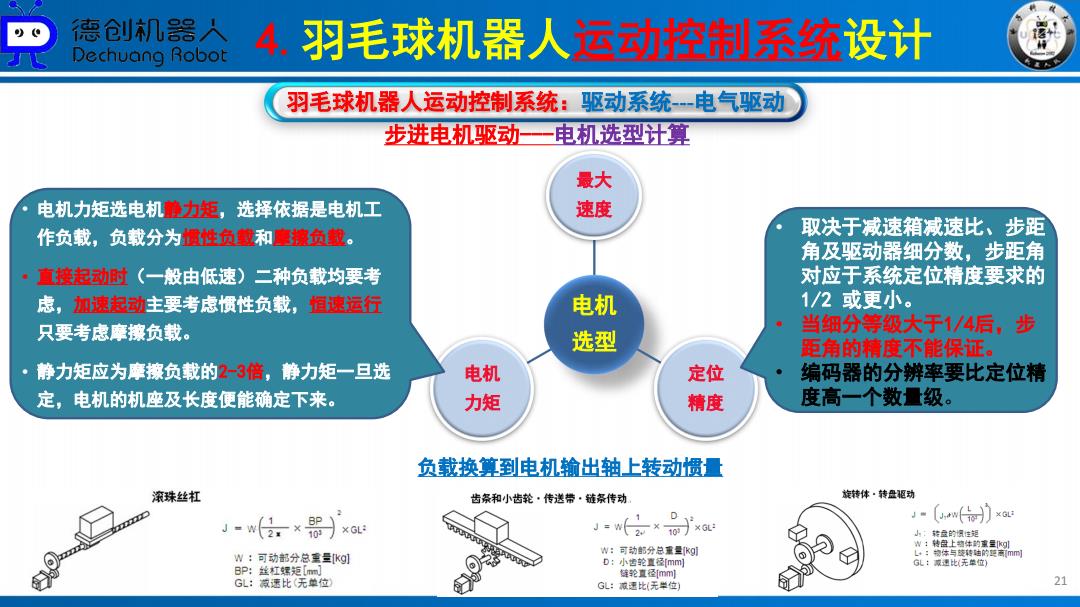
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统电气驱动 步进电机驱动一电机选型计算 最大 电机力矩选电机力矩,选择依据是电机工 速度 作负载,负载分为遗性负戴和章擅负望。 取决于减速箱减速比、步距 角及驱动器细分数,步距角 ·直接起动时(一般由低速)二种负载均要考 对应于系统定位精度要求的 虑,加速起动主要考虑惯性负载,恒速运行 电机 1/2或更小。 只要考虑摩擦负载。 当细分等级大于1/4后,步 选型 臣角的精度不能保证。 ·静力矩应为摩擦负载的2-3倍,静力矩一旦选 电机 定位 编码器的分辨率要比定位精 定,电机的机座及长度便能确定下来。 力矩 精度 度高一个数量级。 负载换算到电机输出轴上转动惯置 滚珠丝杠 齿条和小齿轮·传送带·破条传动 旋转体·转盘柜动 .×器) J=w÷x8x D )xou W:可动部分总重量Kg 2 小转金的性提 W:可动部分总重量Kg L+:物体与转的更商mm D:小雪轮直径(mm GL:藏通比(无单位) BP:丝杠螺矩[mm】 娃轮直径mm可 GL:微速比(无单位 GL:液速比(无举位) 21
4.羽毛球机器人运动控制系统设计 21 羽毛球机器人运动控制系统:驱动系统---电气驱动 步进电机驱动---电机选型计算 电机 选型 最大 速度 定位 精度 电机 力矩 • 取决于减速箱减速比、步距 角及驱动器细分数,步距角 对应于系统定位精度要求的 1/2 或更小。 • 当细分等级大于1/4后,步 距角的精度不能保证。 • 编码器的分辨率要比定位精 度高一个数量级。 • 电机力矩选电机静力矩,选择依据是电机工 作负载,负载分为惯性负载和摩擦负载。 • 直接起动时(一般由低速)二种负载均要考 虑,加速起动主要考虑惯性负载,恒速运行 只要考虑摩擦负载。 • 静力矩应为摩擦负载的2-3倍,静力矩一旦选 定,电机的机座及长度便能确定下来。 负载换算到电机输出轴上转动惯量