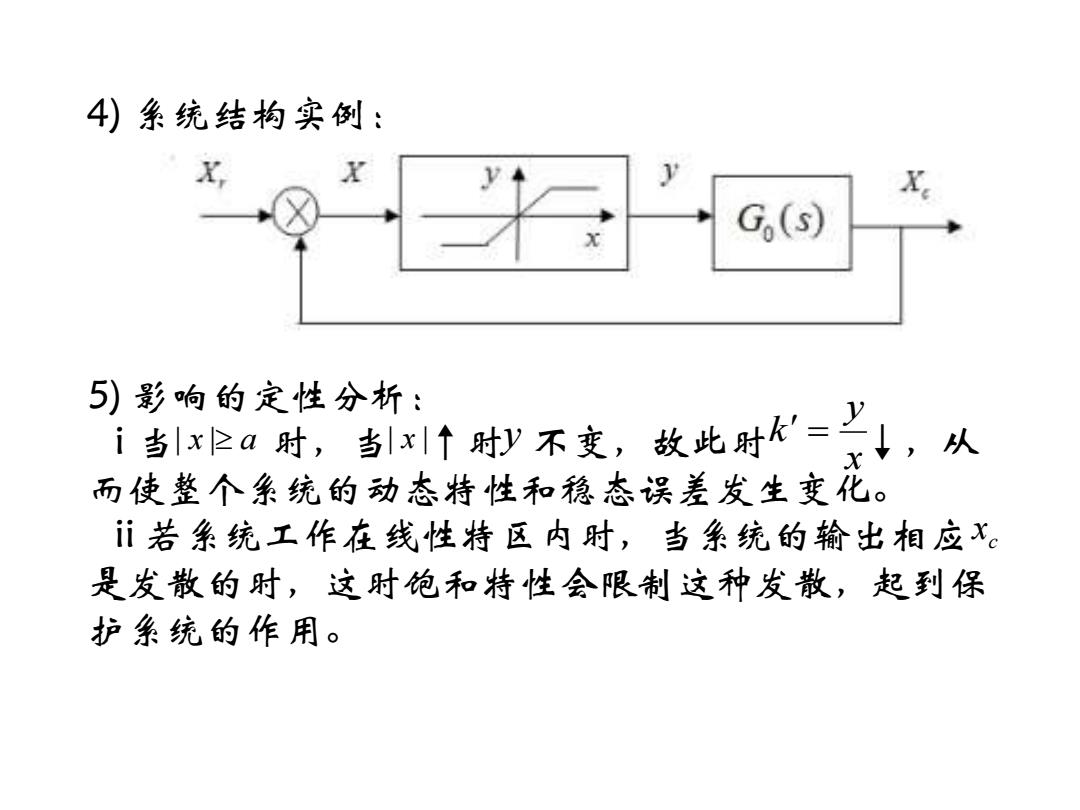
4)系统结构实例: X X X G,(s) 5)影响的定性分析: 当1&时,当个时y不变,故此附k=,从 X 而使整个系统的动态特性和稳态误差发生变化。 ⅱ若系统工作在线性特区内时,当系统的输出相应。 是发散的时,这时饱和特性会限制这种发散,起到保 护系统的作用
4) 系统结构实例: 5) 影响的定性分析: i 当 时,当 ↑时 不变,故此时 ↓,从 而使整个系统的动态特性和稳态误差发生变化。 ii 若系统工作在线性特区内时,当系统的输出相应 是发散的时,这时饱和特性会限制这种发散,起到保 护系统的作用。 | x | a | x | y x y k = c x
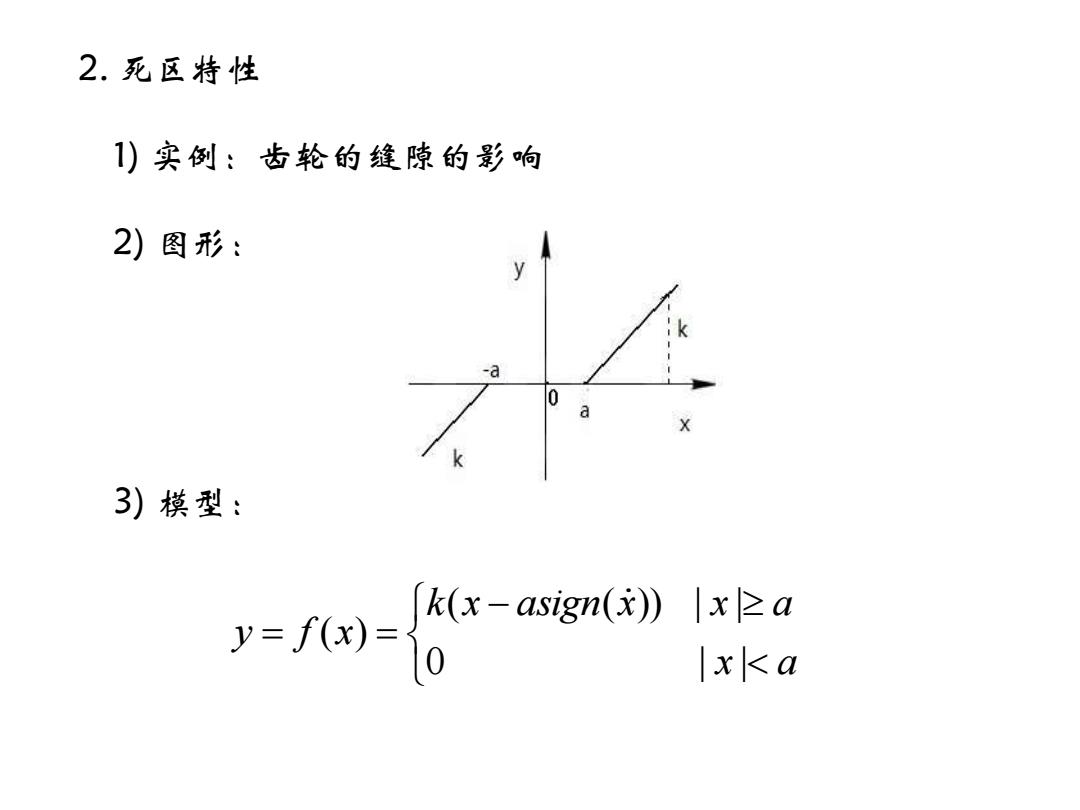
2.死区特性 )实例:齿轮的缝隙的影响 2)图形: y X 3)模型: k(x-asign(x))x=a y=f)= x<a
2. 死区特性 1) 实例:齿轮的缝隙的影响 2) 图形: 3) 模型: − = = x a k x asign x x a y f x 0 | | ( ( )) | | ( )

4)系统结构实例: X X G(s) G,(S) 5)影响的定性分析:(考虑特殊的的情况) 使巳增加,即这种情况下,一般巳s不可能为零。 可以滤掉小幅值的干扰。 图为此条统的非线性部分,当X↑时,《三↑,所以彩 统的动态信号特性与X的大小有关。 当输入是f、之w叶等附变信号,无区的存在会产坐 因为只有当输入信号大于☑或小于一时才会有输出相应
4) 系统结构实例: 5) 影响的定性分析:(考虑特殊的的情况) 使 增加,即这种情况下,一般 不可能为零。 可以滤掉小幅值的干扰。 因为此系统的非线性部分,当 ↑时, ↑,所以系 统的动态信号特性与 的大小有关。 当输入是 、 、 等时变信号,死区的存在会产生, 因为只有当输入信号大于 或小于 时才会有输出相应。 ss e ss e x x y k = x t 2 2 1 t sin wt a −a
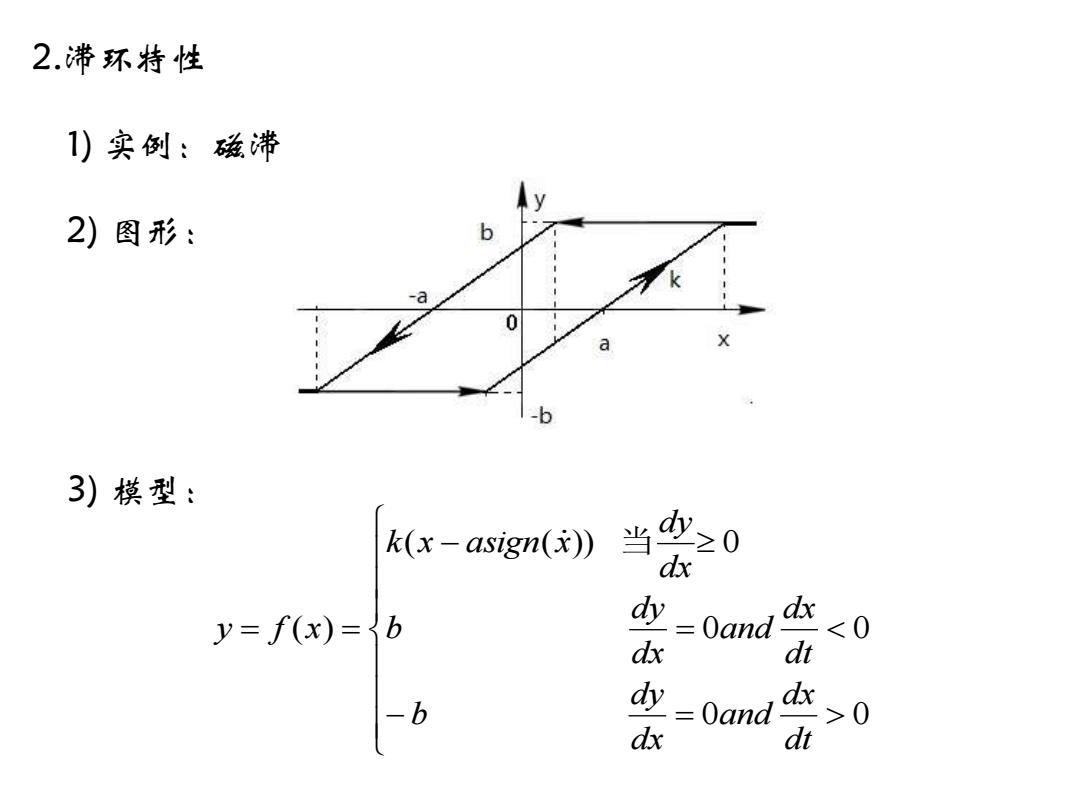
2.滞环特性 1)实例:磁滞 2)图形: b 3)模型: k(x-asign(》当 y dx dx y=f(x)=3b y-Oand ∠0 -B .=Oand dx 70
2.滞环特性 1) 实例:磁滞 2) 图形: 3) 模型: − = = − = = 0 0 0 0 ( ( )) 0 ( ) dt dx and dx dy b dt dx and dx dy b dx dy k x asign x y f x 当
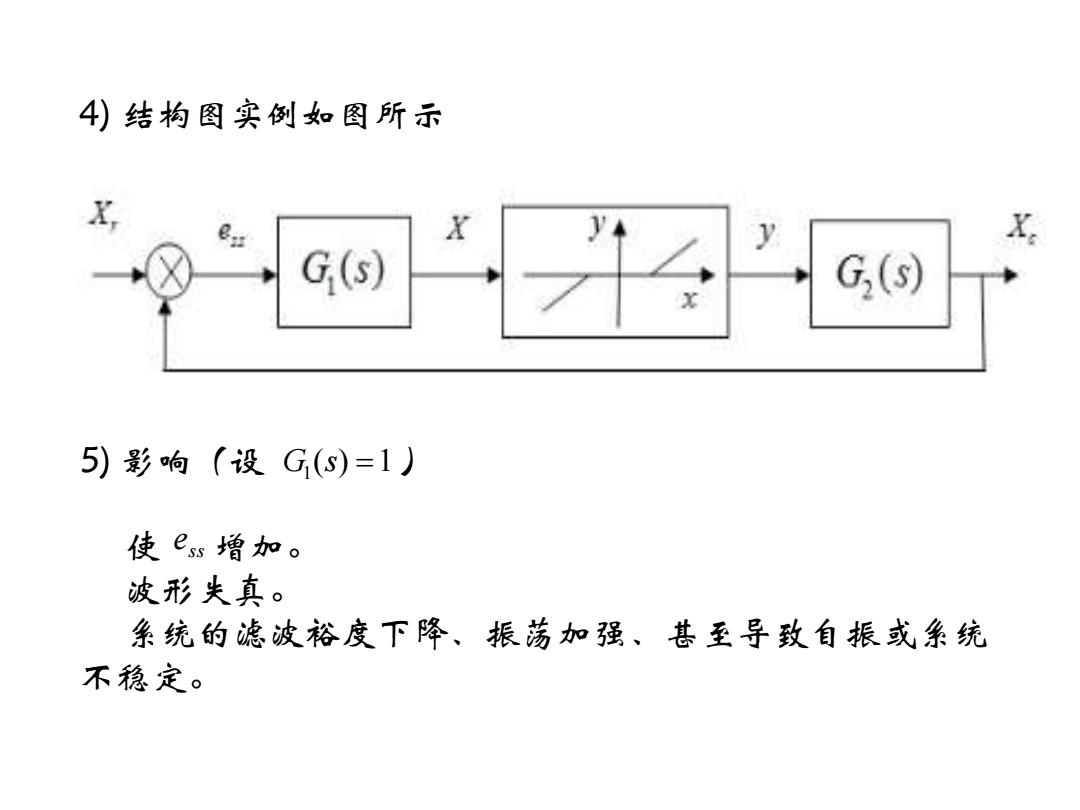
4)结构图实例如图所示 X X X G(s) G() 5)影响(设G(S)=1) 使巳s增加。 波形失真。 系统的滤波裕度下降、振荡加强、甚至导致自振或系统 不稳定
4) 结构图实例如图所示 5) 影响(设 ) 使 增加。 波形失真。 系统的滤波裕度下降、振荡加强、甚至导致自振或系统 不稳定。 G1 (s) =1 ss e