二、机器人的分类 按照功能来分: 1.操作型机器人:能自动控制,可重复编程,多功能, 有几个自由度,可固定或运动,用于相关自动化系统 中。 2.程控型机器人:按预先要求的顺序及条件,依次控 制机器人的机械动作。 3示教再现型机器人:通过引导或其它方式,先教会机 器人动作,输入工作程序,机器人则侧自动重复进行作 业。 4数控型机器人:不必使机器人动作,通过数值、语 言等对机器人进行示教,机器人根据示教后的信息进 行作业。 China Agricultural University
China Agricultural University 二、机器人的分类 按照功能来分: 1.操作型机器人:能自动控制,可重复编程,多功能, 有几个自由度,可固定或运动,用于相关自动化系统 中。 2.程控型机器人:按预先要求的顺序及条件,依次控 制机器人的机械动作。 3.示教再现型机器人:通过引导或其它方式,先教会机 器人动作,输入工作程序,机器人则自动重复进行作 业。 4.数控型机器人: 不必使机器人动作,通过数值、语 言等对机器人进行示教,机器人根据示教后的信息进 行作业
5.感觉控制型机器人:利用传感器获取的信息控制机 器人的动作。 6适应控制型机器人:机器人能适应环境的变化,控 制其自身的行动。 7.学习控制型机器人:机器人能“体会”工作的经验, 具有一定的学习功能,并将所“学”的经验用于工 作中。 8.智能机器人:以人工智能决定其行动的机器人。 China Agricultural University
China Agricultural University 5.感觉控制型机器人:利用传感器获取的信息控制机 器人的动作。 6.适应控制型机器人:机器人能适应环境的变化,控 制其自身的行动。 7.学习控制型机器人:机器人能“体会”工作的经验, 具有一定的学习功能,并将所“学”的经验用于工 作中。 8.智能机器人:以人工智能决定其行动的机器人
按应用环境分: 我国的机器人专家从应用环境出发,将机器人分为 两大类,即工业机器人和特种机器人。 工业机器人就是面向工业领域的多关节机械手或多 自由度机器人。 特种机器人则是除工业机器人之外的、用于非制造 业并服务于人类的各种先进机器人,包括:服务机器 人、水下机器人、娱乐机器人、军用机器人、农业机 器人、机器人化机器等。在特种机器人中,有些分支 发展很快,有独立成体系的趋势,如服务机器人、水 下机器人、军用机器人、微操作机器人等。 国际上的机器人学者,从应用环境出发将机器人也 分为两类:制造环境下的工业机器人和非制造环境 的服努9愤型机器人
China Agricultural University 按应用环境分: 我国的机器人专家从应用环境出发,将机器人分为 两大类,即工业机器人和特种机器人。 工业机器人就是面向工业领域的多关节机械手或多 自由度机器人。 特种机器人则是除工业机器人之外的、用于非制造 业并服务于人类的各种先进机器人,包括:服务机器 人、水下机器人、娱乐机器人、军用机器人、农业机 器人、机器人化机器等。在特种机器人中,有些分支 发展很快,有独立成体系的趋势,如服务机器人、水 下机器人、军用机器人、微操作机器人等。 国际上的机器人学者,从应用环境出发将机器人也 分为两类:制造环境下的工业机器人和非制造环境下 的服务与仿人型机器人
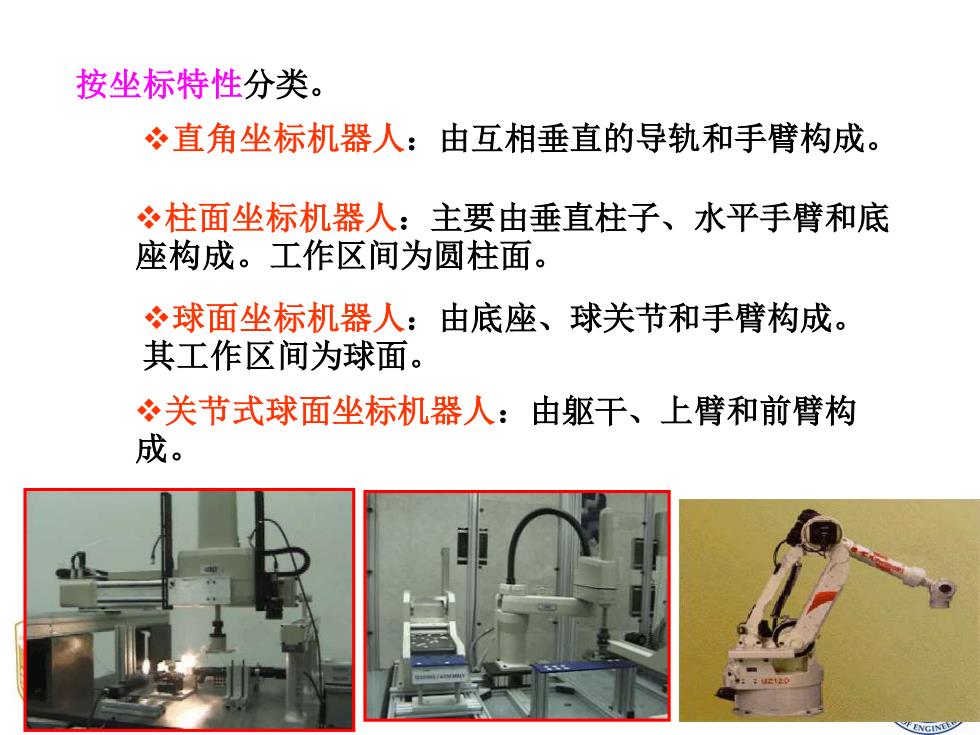
按坐标特性分类。 直角坐标机器人:由互相垂直的导轨和手臂构成。 冬柱面坐标机器人:主要由垂直柱子、水平手臂和底 座构成。工作区间为圆柱面。 球面坐标机器人:由底座、球关节和手臂构成。 其工作区间为球面。 ?关节式球面坐标机器人:由躯干、上臂和前臂构 成
China Agricultural University 第一章 机器人学概述 ❖直角坐标机器人:由互相垂直的导轨和手臂构成。 ❖柱面坐标机器人:主要由垂直柱子、水平手臂和底 座构成。工作区间为圆柱面。 ❖球面坐标机器人:由底座、球关节和手臂构成。 其工作区间为球面。 ❖关节式球面坐标机器人:由躯干、上臂和前臂构 成。 按坐标特性分类
按机构特性分类。 。串联机器人:各连杆为串联 并联机器人:各连杆为并联 , 按尺寸分类: 中面大↑大 大型机器人、一般机器人、微机器人 China Agricultural University
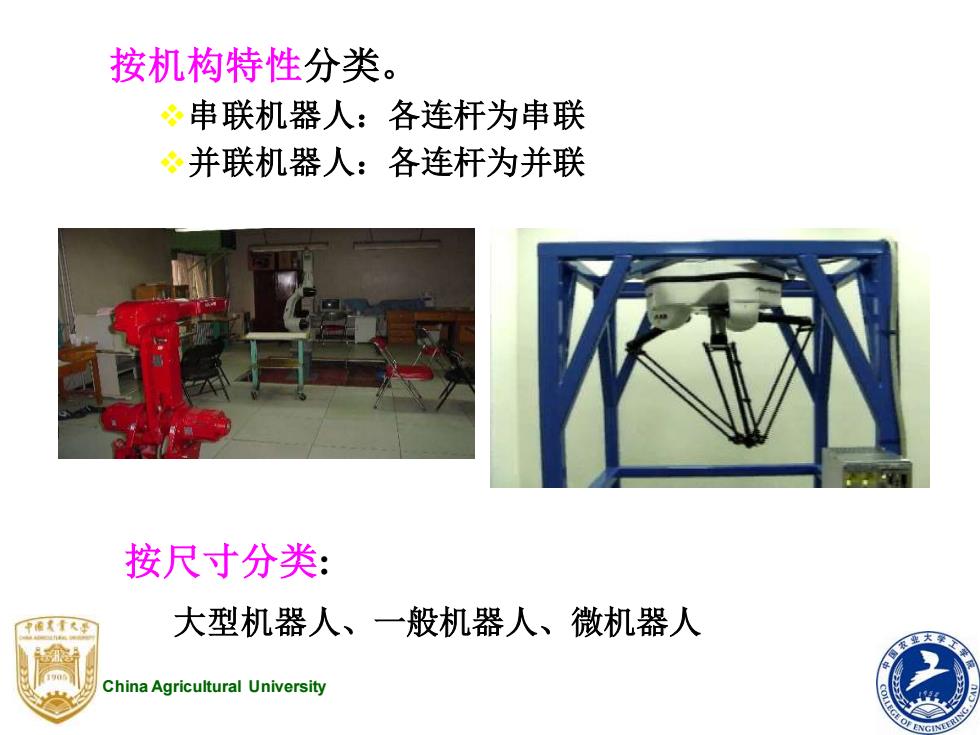
China Agricultural University 按机构特性分类。 ❖串联机器人:各连杆为串联 ❖并联机器人:各连杆为并联 按尺寸分类: 大型机器人、一般机器人、微机器人