
年月日 图1-7机电一体化学科构成 第三节机电一体化发展方向 一、机电一体化特点 1、体积小,重量轻 2、速度快,精度高 3、可靠性高 4、柔性好 二、发展方向 1、复合化 2、小型化,轻量化 3、高速化 4、移动化 5、智能化 6、层次化和系统化 7、全盘化 总之,性能上:向高精度、高效率、高性能、智能化方向发展: 功能上:向小型化、轻型化、多功能方向发展; 层次上:向系统化、复合集成化方向发展
年 月 日 6 图 1-7 机电一体化学科构成 第三节 机电一体化发展方向 一、机电一体化特点 1、体积小,重量轻 2、速度快,精度高 3、可靠性高 4、柔性好 二、发展方向 1、复合化 2、小型化,轻量化 3、高速化 4、移动化 5、智能化 6、层次化和系统化 7、全盘化 总之,性能上:向高精度、高效率、高性能、智能化方向发展; 功能上:向小型化、轻型化、多功能方向发展; 层次上:向系统化、复合集成化方向发展
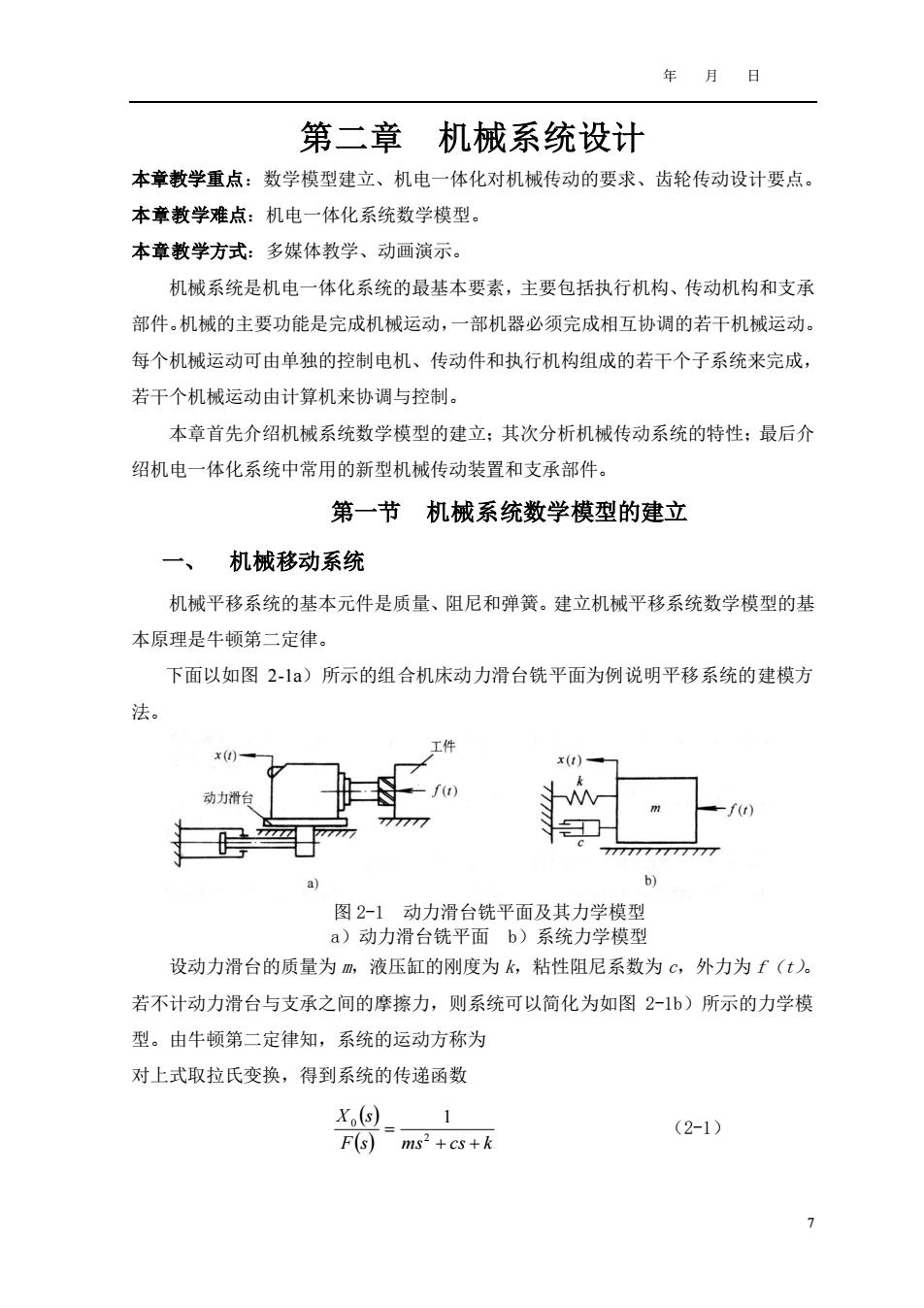
年月日 第二章机械系统设计 本章教学重点:数学模型建立、机电一体化对机械传动的要求、齿轮传动设计要点。 本章教学难点:机电一体化系统数学模型。 本章教学方式:多媒体教学、动画演示。 机械系统是机电一体化系统的最基本要素,主要包括执行机构、传动机构和支承 部件。机械的主要功能是完成机械运动,一部机器必须完成相互协调的若干机械运动。 每个机械运动可由单独的控制电机、传动件和执行机构组成的若干个子系统来完成, 若干个机械运动由计算机来协调与控制。 本章首先介绍机械系统数学模型的建立:其次分析机械传动系统的特性:最后介 绍机电一体化系统中常用的新型机械传动装置和支承部件。 第一节机械系统数学模型的建立 一、机械移动系统 机械平移系统的基本元件是质量、阻尼和弹簧。建立机械平移系统数学模型的基 本原理是牛顿第二定律。 下面以如图2-1a)所示的组合机床动力滑台铣平面为例说明平移系统的建模方 法。 x(0 工件 动力清台 f -f( 777777777 a) 图2-1动力滑台铣平面及其力学模型 a)动力滑台铣平面b)系统力学模型 设动力滑台的质量为m,液压缸的刚度为k,粘性阻尼系数为c,外力为「(t。 若不计动力滑台与支承之间的摩擦力,则系统可以简化为如图2-1)所示的力学模 型。由牛顿第二定律知,系统的运动方称为 对上式取拉氏变换,得到系统的传递函数 x.(s) 1 (2-1) F(s)ms2+cs+k
年 月 日 7 第二章 机械系统设计 本章教学重点:数学模型建立、机电一体化对机械传动的要求、齿轮传动设计要点。 本章教学难点:机电一体化系统数学模型。 本章教学方式:多媒体教学、动画演示。 机械系统是机电一体化系统的最基本要素,主要包括执行机构、传动机构和支承 部件。机械的主要功能是完成机械运动,一部机器必须完成相互协调的若干机械运动。 每个机械运动可由单独的控制电机、传动件和执行机构组成的若干个子系统来完成, 若干个机械运动由计算机来协调与控制。 本章首先介绍机械系统数学模型的建立;其次分析机械传动系统的特性;最后介 绍机电一体化系统中常用的新型机械传动装置和支承部件。 第一节 机械系统数学模型的建立 一、 机械移动系统 机械平移系统的基本元件是质量、阻尼和弹簧。建立机械平移系统数学模型的基 本原理是牛顿第二定律。 下面以如图 2-1a)所示的组合机床动力滑台铣平面为例说明平移系统的建模方 法。 图 2-1 动力滑台铣平面及其力学模型 a)动力滑台铣平面 b)系统力学模型 设动力滑台的质量为 m,液压缸的刚度为 k,粘性阻尼系数为 c,外力为 f(t)。 若不计动力滑台与支承之间的摩擦力,则系统可以简化为如图 2-1b)所示的力学模 型。由牛顿第二定律知,系统的运动方称为 对上式取拉氏变换,得到系统的传递函数 ( ) F(s) ms cs k X s + + = 2 0 1 (2-1)

年月日 二、机械转动系统 机械转动系统的基本元件是转动惯量、阻尼器和弹簧。建立机械转动系统数学模 型的基本原理仍是牛顿第二定律。 简单扭摆的工作原理如图2-2所示,图中了为摆锤的转动惯量:c为摆锤与空气 间的粘性阻尼系数:k为扭簧的弹性刚度:m(t)为加在摆锤上的扭矩:日(t)为摆 锤转角。则系统的运动方称为: 天 o(n) 图2-2扭摆工作原理图 Ji+c9+kθ=m0) (2-2) 对上式取拉氏变换,得系统的传递函数为 o(s) 1 (2-3) m⑤J52+cs+k 可以看出,式(2-3)与式(2-1)具有相同的形式。 三、基本物理量的折算 在建立机械系统数学模型的过程中,经常会遇到基本物理量的折算问题,在此结 合数控机床进给系统,介绍建模中的基本物理量的折算问题。 数控机床进给系统如图2-3所示。电动机通过两级减速齿轮2、Z2、24、Z4及丝 杠螺母机构驱动工作台做直线运动。 &
年 月 日 8 二、机械转动系统 机械转动系统的基本元件是转动惯量、阻尼器和弹簧。建立机械转动系统数学模 型的基本原理仍是牛顿第二定律。 简单扭摆的工作原理如图 2-2 所示,图中 J 为摆锤的转动惯量;c 为摆锤与空气 间的粘性阻尼系数;k 为扭簧的弹性刚度;m(t)为加在摆锤上的扭矩;(t)为摆 锤转角。则系统的运动方称为: 图 2-2 扭摆工作原理图 J + c + k = m(t) (2-2) 对上式取拉氏变换,得系统的传递函数为 ( ) m(s) Js cs k s + + = 2 1 (2-3) 可以看出,式(2-3)与式(2-1)具有相同的形式。 三、基本物理量的折算 在建立机械系统数学模型的过程中,经常会遇到基本物理量的折算问题,在此结 合数控机床进给系统,介绍建模中的基本物理量的折算问题。 数控机床进给系统如图 2-3 所示。电动机通过两级减速齿轮 z1、z2、z3、z4及丝 杠螺母机构驱动工作台做直线运动
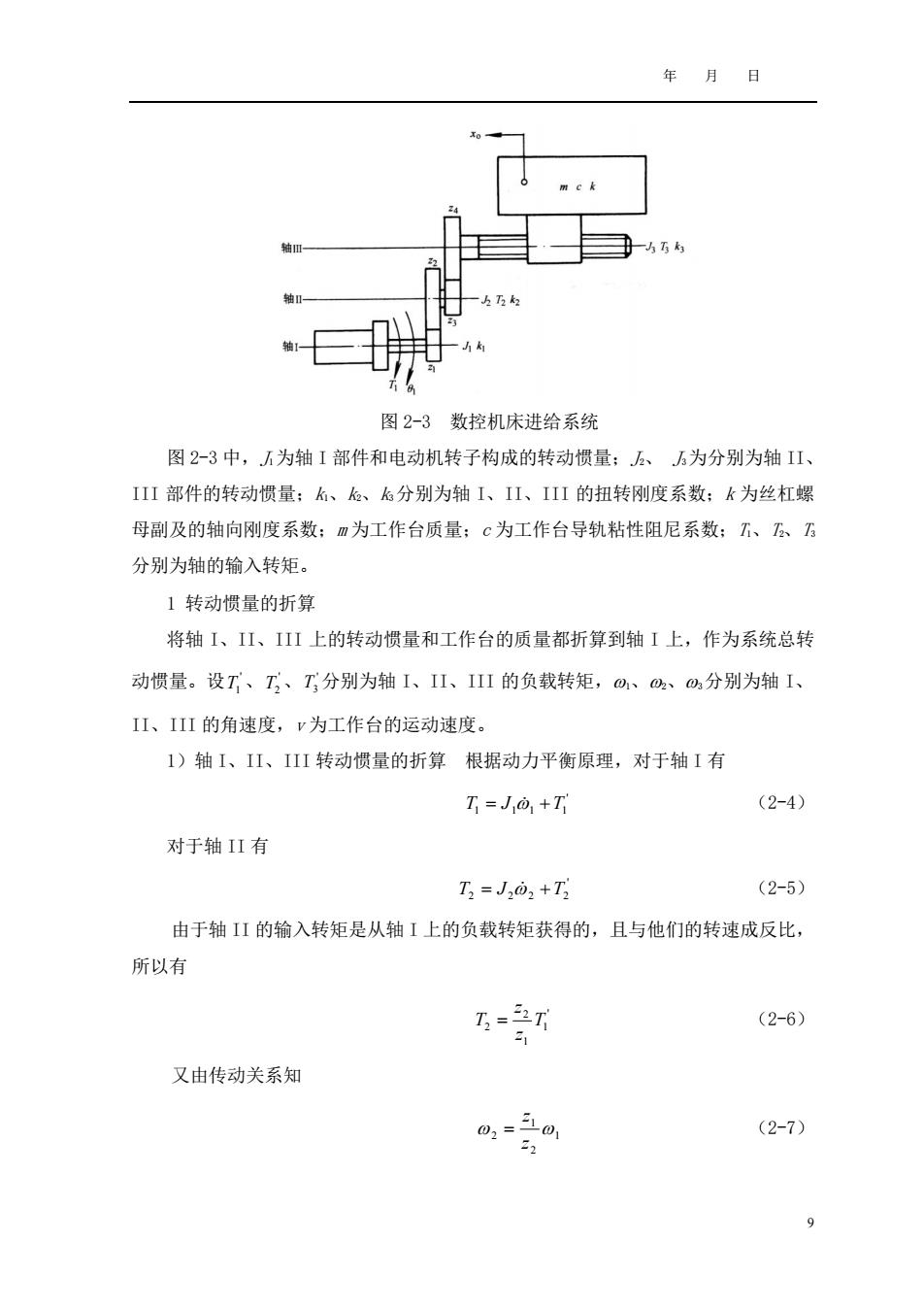
年月日 图2-3数控机床进给系统 图2-3中,为轴1部件和电动机转子构成的转动惯量:么、乃为分别为轴I1、 III部件的转动惯量:k、、飞分别为轴I、II、III的扭转刚度系数:k为丝杠螺 母副及的轴向刚度系数:m为工作台质量:c为工作台导轨粘性阻尼系数:T、、方 分别为轴的输入转矩。 1转动惯量的折算 将轴I、II、IIⅡ上的转动惯量和工作台的质量都折算到轴I上,作为系统总转 动惯量。设T、了、T分别为轴I、I1、II1的负载转矩,、、分别为轴I、 II、III的角速度,v为工作台的运动速度。 1)轴1、I1、I1转动惯量的折算根据动力平衡原理,对于轴I有 T=J0+T (2-4) 对于轴I1有 T2=J2@+T (2-5) 由于轴1的输入转矩是从轴I上的负载转矩获得的,且与他们的转速成反比, 所以有 1=2T (2-6) 又由传动关系知 (2-7)
年 月 日 9 图 2-3 数控机床进给系统 图 2-3 中,J1为轴 I 部件和电动机转子构成的转动惯量;J2、 J3为分别为轴 II、 III 部件的转动惯量;k1、k2、k3分别为轴 I、II、III 的扭转刚度系数;k 为丝杠螺 母副及的轴向刚度系数;m 为工作台质量;c 为工作台导轨粘性阻尼系数;T1、T2、T3 分别为轴的输入转矩。 1 转动惯量的折算 将轴 I、II、III 上的转动惯量和工作台的质量都折算到轴 I 上,作为系统总转 动惯量。设 ' T1 、 ' T2、 ' T3 分别为轴 I、II、III 的负载转矩,1、2、3分别为轴 I、 II、III 的角速度,v 为工作台的运动速度。 1)轴 I、II、III 转动惯量的折算 根据动力平衡原理,对于轴 I 有 ' 1 1 1 T1 T = J + (2-4) 对于轴 II 有 ' 2 2 2 T2 T = J + (2-5) 由于轴 II 的输入转矩是从轴 I 上的负载转矩获得的,且与他们的转速成反比, 所以有 ' 1 1 2 2 T z z T = (2-6) 又由传动关系知 1 2 1 2 z z = (2-7)

年月日 将式(2-6)和(2-7)代入式(2-5)得 + (2-8) 对于轴II1有 工=J0+T (2-9) 根据力学原理和传动关系,整理得 - (2-10) 2)工作台质量的折算根据动力平衡关系:丝杠转动一周所做的功等于工作台 前进一个导程时其惯性力所做的功,对于工作台和丝杠有 T2元=mL (2-11) 式中一一丝杠导程。 根据传动关系有 (2-12) 将式(2-13)代入式(2-11)得 - (2-13) 3)折算到轴1上的总转动惯量将式(2-8)、(2-10)、(2-13)代入式(2-4) 并整理得 (2-14) 式中J?一一系统折算到轴I上的总转动惯量。 + (2-15) 其中,第二项为轴1转动惯量折算到轴I上的当量转动惯量:第三项为轴II1转动 惯量折算到轴I上的当量转动惯量:第四项为工作台质量折算到轴1上的当量转动惯 10
年 月 日 10 将式(2-6)和(2-7)代入式(2-5)得 ' 2 2 1 1 2 2 1 2 ' 1 T z z z z T J + = (2-8) 对于轴 III 有 ' 3 3 3 T3 T = J + (2-9) 根据力学原理和传动关系,整理得 ' 3 4 3 1 2 4 3 2 1 3 ' 2 T z z z z z z T J + = (2-10) 2)工作台质量的折算 根据动力平衡关系:丝杠转动一周所做的功等于工作台 前进一个导程时其惯性力所做的功,对于工作台和丝杠有 T 2 = mv L ' 3 (2-11) 式中 L——丝杠导程。 根据传动关系有 1 2 4 1 3 3 2 2 = = z z L L z z v (2-12) 将式(2-13)代入式(2-11)得 1 2 4 1 3 2 ' 3 2 m z z L z z T = (2-13) 3)折算到轴 I 上的总转动惯量 将式(2-8)、(2-10)、(2-13)代入式(2-4) 并整理得 1 2 2 2 4 1 3 2 2 4 1 3 3 2 2 1 1 1 2 2 + + = + L z z z z m z z z z J z z T J J 1 = J (2-14) 式中 J ——系统折算到轴 I 上的总转动惯量。 2 2 2 4 1 3 2 2 4 1 3 3 2 2 1 1 2 2 + + = + L z z z z m z z z z J z z J J J (2-15) 其中,第二项为轴 II 转动惯量折算到轴 I 上的当量转动惯量;第三项为轴 III 转动 惯量折算到轴 I 上的当量转动惯量;第四项为工作台质量折算到轴 I 上的当量转动惯