第三章机电一体化机械设计 机电一体化的机械设计主要包括传动、支承、导轨等设计内容,由于机电一体化系统的机城 结构要求有较小的摩擦、较高的精度和刚性,因此,在用传统的方法进行机械设计的同时,应尽 量采用现代的精密机械设计方法以提高系统的性能。本章主要介绍一些目前应用较多的机电一体 化机械设计的方法。 第一节无侧隙齿轮传动机构 齿轮传动是机电一体化系统中常用的传动装置,它在同服运动中的主要作用是实现同服电机 与执行机构间的力矩匹配和速度匹配,还可以实现直线运动与旋转运动的转换。由于齿轮传动的 常数,传动精确度高,可做到零侧隙无回差,强度大能承受重载,结较多的机电 机城的方法。韵聚流接力小效辛高等因,齿轮传动成为班机电华器 统中目前使用最多的传动机构。 机电一体化产品往往要求传动机构具有自动变向功能,这就要求齿轮传动机构必须采取措施 消除齿侧间隙,以保证机构的双向传动精度。下面介绍几种消除齿轮间隙的方法。 一、直齿圆柱齿轮传动机 1、偏心轴套调整法 图31所示为最简单的偏心轴套式消隙结构。电动机2通过偏心轴套1装在壳体上。转动偏 心轴套1可以调整两啮合齿轮的中心距,从而消除直齿圆柱齿轮传动的齿侧间隙及其造成的换向 死区。这种方法结构简单,但侧隙调整后不能自动补偿。 2、双片薄齿轮错齿调整法 两个啮合的直齿圆柱齿轮中一个采用宽齿轮,另 一个由两片可以相对转动的薄片齿轮组成。装配时使 一片薄齿轮的齿左侧和另一片的齿右侧分别紧贴在宽 齿轮齿槽的左、右两侧,通过两薄片齿轮的错齿,消 除齿侧间隙,反向时也不会出现死区。如图3-2所示 两薄片齿轮1、2上各装入有螺纹的凸耳3、4,螺钉 装在凸耳3上,螺母6、7可调节螺钉5的伸出长度: 弹簧8一端勾在凸耳9上,另一瑞勾在螺钉5上。转 动螺母7(螺母6用于锁紧)可改变弹簧8的张力大 小,调节齿轮1、2的相对位置,达到错齿。这种错齿 调整法的齿侧间隙可自动补偿,但结构复杂 图31偏心轴套式消隙结构 1一偏心轴套2一电动机
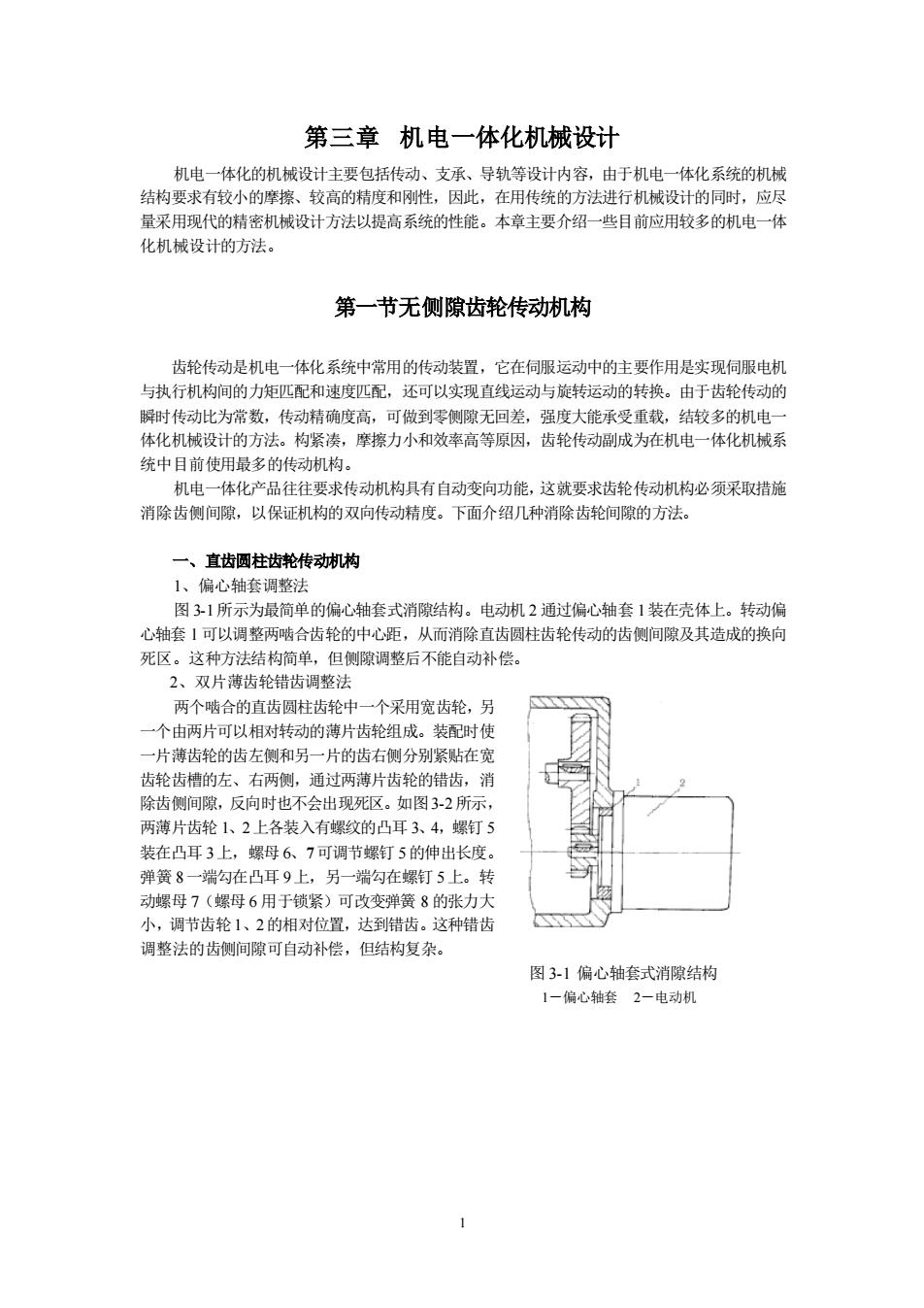
1 第三章 机电一体化机械设计 机电一体化的机械设计主要包括传动、支承、导轨等设计内容,由于机电一体化系统的机械 结构要求有较小的摩擦、较高的精度和刚性,因此,在用传统的方法进行机械设计的同时,应尽 量采用现代的精密机械设计方法以提高系统的性能。本章主要介绍一些目前应用较多的机电一体 化机械设计的方法。 第一节无侧隙齿轮传动机构 齿轮传动是机电一体化系统中常用的传动装置,它在伺服运动中的主要作用是实现伺服电机 与执行机构间的力矩匹配和速度匹配,还可以实现直线运动与旋转运动的转换。由于齿轮传动的 瞬时传动比为常数,传动精确度高,可做到零侧隙无回差,强度大能承受重载,结较多的机电一 体化机械设计的方法。构紧凑,摩擦力小和效率高等原因,齿轮传动副成为在机电一体化机械系 统中目前使用最多的传动机构。 机电一体化产品往往要求传动机构具有自动变向功能,这就要求齿轮传动机构必须采取措施 消除齿侧间隙,以保证机构的双向传动精度。下面介绍几种消除齿轮间隙的方法。 一、直齿圆柱齿轮传动机构 1、偏心轴套调整法 图 3-1所示为最简单的偏心轴套式消隙结构。电动机 2 通过偏心轴套 1装在壳体上。转动偏 心轴套 l 可以调整两啮合齿轮的中心距,从而消除直齿圆柱齿轮传动的齿侧间隙及其造成的换向 死区。这种方法结构简单,但侧隙调整后不能自动补偿。 2、双片薄齿轮错齿调整法 两个啮合的直齿圆柱齿轮中一个采用宽齿轮,另 一个由两片可以相对转动的薄片齿轮组成。装配时使 一片薄齿轮的齿左侧和另一片的齿右侧分别紧贴在宽 齿轮齿槽的左、右两侧,通过两薄片齿轮的错齿,消 除齿侧间隙,反向时也不会出现死区。如图3-2所示, 两薄片齿轮 1、2上各装入有螺纹的凸耳 3、4,螺钉 5 装在凸耳 3上,螺母 6、7可调节螺钉 5的伸出长度。 弹簧 8一端勾在凸耳 9上,另一端勾在螺钉 5上。转 动螺母 7(螺母 6 用于锁紧)可改变弹簧 8 的张力大 小,调节齿轮1、2的相对位置,达到错齿。这种错齿 调整法的齿侧间隙可自动补偿,但结构复杂。 图 3-1 偏心轴套式消隙结构 1-偏心轴套 2-电动机
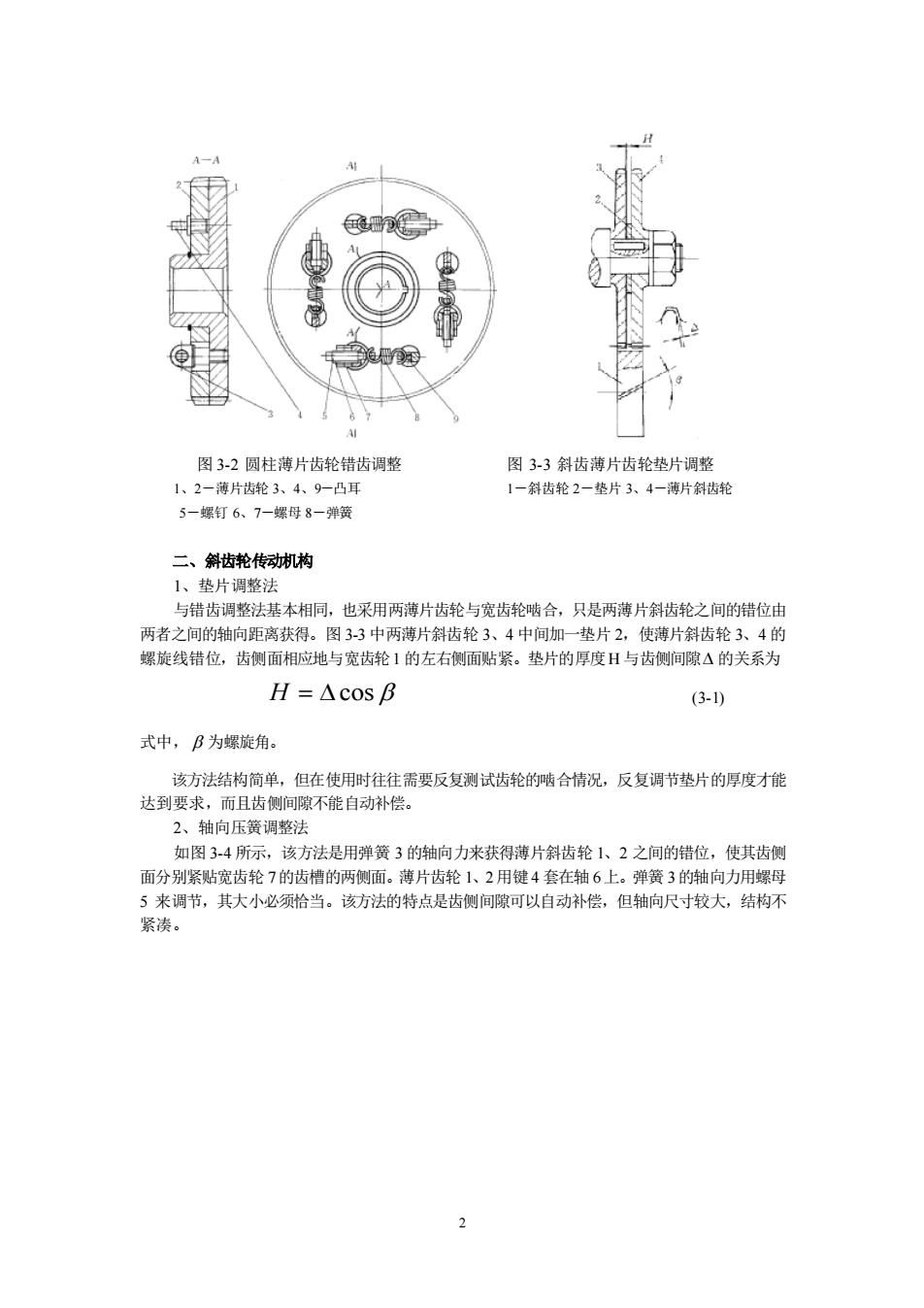
图3-2圆柱薄片齿轮错齿调整 图3-3斜齿薄片齿轮垫片调整 1、2一薄片齿轮3、4、9一凸耳 1一斜齿轮2一垫片3、4一薄片斜齿轮 5一螺钉6.7一蝶母8一弹簧 二、斜齿轮传动机构 1、垫片调整法 与错齿调整法基本相同,也采用两薄片齿轮与宽齿轮啮合,只是两薄片斜齿轮之间的错位由 两者之间的轴向距离获得。图3-3中两薄片斜齿轮3、4中间加一垫片2,使薄片斜齿轮3、4的 螺旋线错位,齿侧面相应地与宽齿轮1的左右侧面贴紧。垫片的厚度H与齿侧间隙△的关系为 H=△cosB (3-) 式中,B为螺旋角。 该方法结构简单,但在使用时往往需要反复测试齿轮的啮合情况,反复调节垫片的厚度才能 达到要求,而且齿侧间隙不能自动补偿。 2、轴向压簧调整法 如图3-4所示,该方法是用弹簧3的轴向力来获得薄片斜齿轮1、2之间的错位,使其齿侧 面分别紧贴宽齿轮7的齿槽的两侧面。薄片齿轮1、2用键4套在轴6上。弹簧3的轴向力用螺母 5来调节,其大小必须恰当。该方法的特点是齿侧间隙可以自动补偿,但轴向尺寸较大,结构不 紧渗
2 图 3-2 圆柱薄片齿轮错齿调整 图 3-3 斜齿薄片齿轮垫片调整 1、2-薄片齿轮 3、4、9-凸耳 1-斜齿轮 2-垫片 3、4-薄片斜齿轮 5-螺钉 6、7-螺母 8-弹簧 二、斜齿轮传动机构 1、垫片调整法 与错齿调整法基本相同,也采用两薄片齿轮与宽齿轮啮合,只是两薄片斜齿轮之间的错位由 两者之间的轴向距离获得。图 3-3 中两薄片斜齿轮 3、4 中间加一垫片 2,使薄片斜齿轮 3、4 的 螺旋线错位,齿侧面相应地与宽齿轮1 的左右侧面贴紧。垫片的厚度H 与齿侧间隙 的关系为 H = cos (3-1) 式中, 为螺旋角。 该方法结构简单,但在使用时往往需要反复测试齿轮的啮合情况,反复调节垫片的厚度才能 达到要求,而且齿侧间隙不能自动补偿。 2、轴向压簧调整法 如图 3-4 所示,该方法是用弹簧 3 的轴向力来获得薄片斜齿轮 1、2 之间的错位,使其齿侧 面分别紧贴宽齿轮 7的齿槽的两侧面。薄片齿轮 1、2用键4 套在轴 6上。弹簧 3的轴向力用螺母 5 来调节,其大小必须恰当。该方法的特点是齿侧间隙可以自动补偿,但轴向尺寸较大,结构不 紧凑
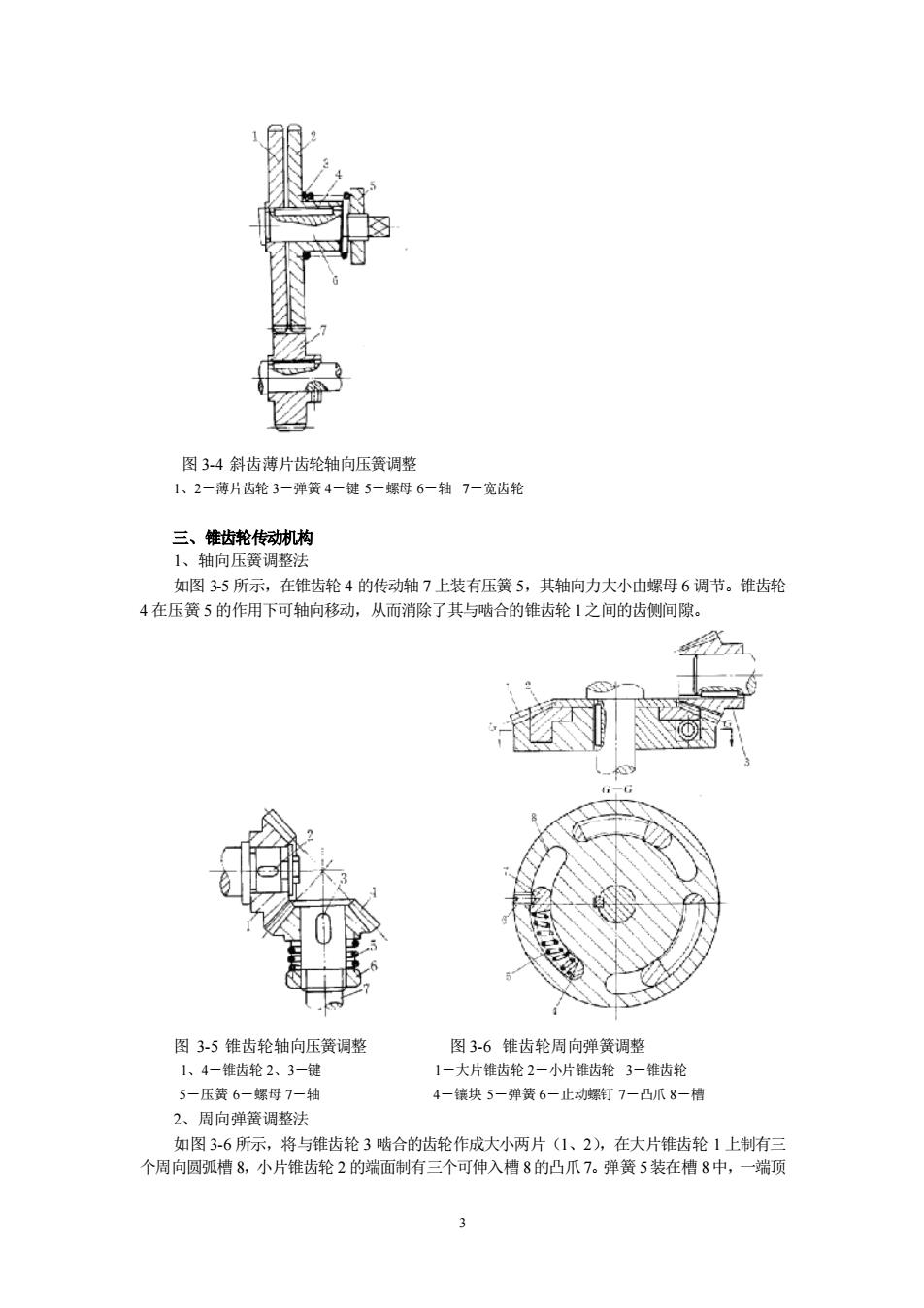
图34斜齿薄片齿轮轴向压簧调整 1、2一薄片齿轮3一弹簧4-健了一螺母6一轴7-宽齿轮 三、齿轮传动机构 工、轴向压簧调整 如图35所示,在锥齿轮4的传动轴7上装有压簧5,其轴向力大小由螺母6调节。锥齿轮 4在压簧5的作用下可轴向移动,从而消除了其与啮合的锥齿轮1之间的齿侧间隙。 图3-5锥齿轮轴向压簧调整 图3.6维齿纶周向谦簧调整 ,4一锥齿轮2、3一键 大片锥齿轮2一小片锥齿轮3一锥齿料 5一压簧6一螺母7一轴 4 镶块5一弹簧6-止动爆钉7-凸爪8-情 2、周向弹簧调整法 如图3-6所示,将与锥齿轮3啮合的齿轮作成大小两片(1、2),在大片锥齿轮1上制有 个周向圆弧槽8,小片锥齿轮2的端面制有三个可伸入槽8的凸爪7。弹簧5装在槽8中,一端项
3 图 3-4 斜齿薄片齿轮轴向压簧调整 1、2-薄片齿轮 3-弹簧 4-键 5-螺母 6-轴 7-宽齿轮 三、锥齿轮传动机构 1、轴向压簧调整法 如图 3-5 所示,在锥齿轮 4 的传动轴 7 上装有压簧 5,其轴向力大小由螺母 6 调节。锥齿轮 4 在压簧 5 的作用下可轴向移动,从而消除了其与啮合的锥齿轮 1之间的齿侧间隙。 图 3-5 锥齿轮轴向压簧调整 图 3-6 锥齿轮周向弹簧调整 1、4-锥齿轮 2、3-键 1-大片锥齿轮 2-小片锥齿轮 3-锥齿轮 5-压簧 6-螺母 7-轴 4-镶块 5-弹簧 6-止动螺钉 7-凸爪 8-槽 2、周向弹簧调整法 如图 3-6 所示,将与锥齿轮 3 啮合的齿轮作成大小两片(1、2),在大片锥齿轮 1 上制有三 个周向圆弧槽 8,小片锥齿轮 2 的端面制有三个可伸入槽 8的凸爪7。弹簧 5装在槽 8中,一端顶
在凸爪7上,另一端顶在镶在槽8中的镶块4上。止动螺钉6装配时用,安装完毕将其卸下,则 大小片锥齿轮1、2在弹簧力作用下错齿,从而达到消除间隙的目的。 四、齿轮齿条传动城机构 在机电一体化产品中对于大行程传动机构往往采用齿轮齿条传动,因为其钢刚度、精度和工作 性能不会因行程增大而明显降低,但它与其它齿轮传动一样也存在齿侧间隙,应采取消隙措施。 当传动负找小时,可可采用双片薄齿轮错齿调整法,使两片满齿轮的齿侧分别紧贴齿条的齿槽 两相应侧面,以清除齿侧间隙 当传动负载大时 可采用双齿轮调整法。如图37所示,小齿轮1、6分别与齿条7啮合 与小齿轮1、6同轴的大齿轮2、5分别与齿轮3啮合,通过预载装置4向齿轮3上预加负载,使 大齿轮2、5同时向两个相反方向转动,从而带动小齿轮1、6转动,其齿便分别紧贴在齿条7上 齿槽的左、右侧,消除了齿侧间隙。 图3-7双齿轮调整 1,6一小齿轮2.5一大齿轮3一齿轮4一预载装置7-齿条 第二节滑动螺旋传动 螺旋传动是机电一体化系统中常用的一种传动形式。它是利用螺杆与螺母的相对运动,将旋转 运动变为直线运动,其运动关系为 L=0 (3-2) 式中L -螺杆(或螺母)的位移: Ph- 导程 0一 一螺杆和螺母间的相对转角。 一、滑动螺旋传动的特点 滑动螺旋传动具有传动此比大、驱动负载能力强和自锁等特点。 1、降速传动比大 螺杆(或螺母)转动一转,螺母(或螺杆)移动一个螺距(单头螺纹)。因为螺距一般很小, 所以在转角很大的情况下,能获得很小的直线位移量,可以大大缩短机构的传动链,因而螺旋传 动结构简单、紧凑,传动精度高,工作平稳。 2、具有增力作用 只要给主动件(螺杆)一个较小的输入转矩,从动件即能得到较大的轴向力输出,因此带负 载能力较强。 3、能自锁
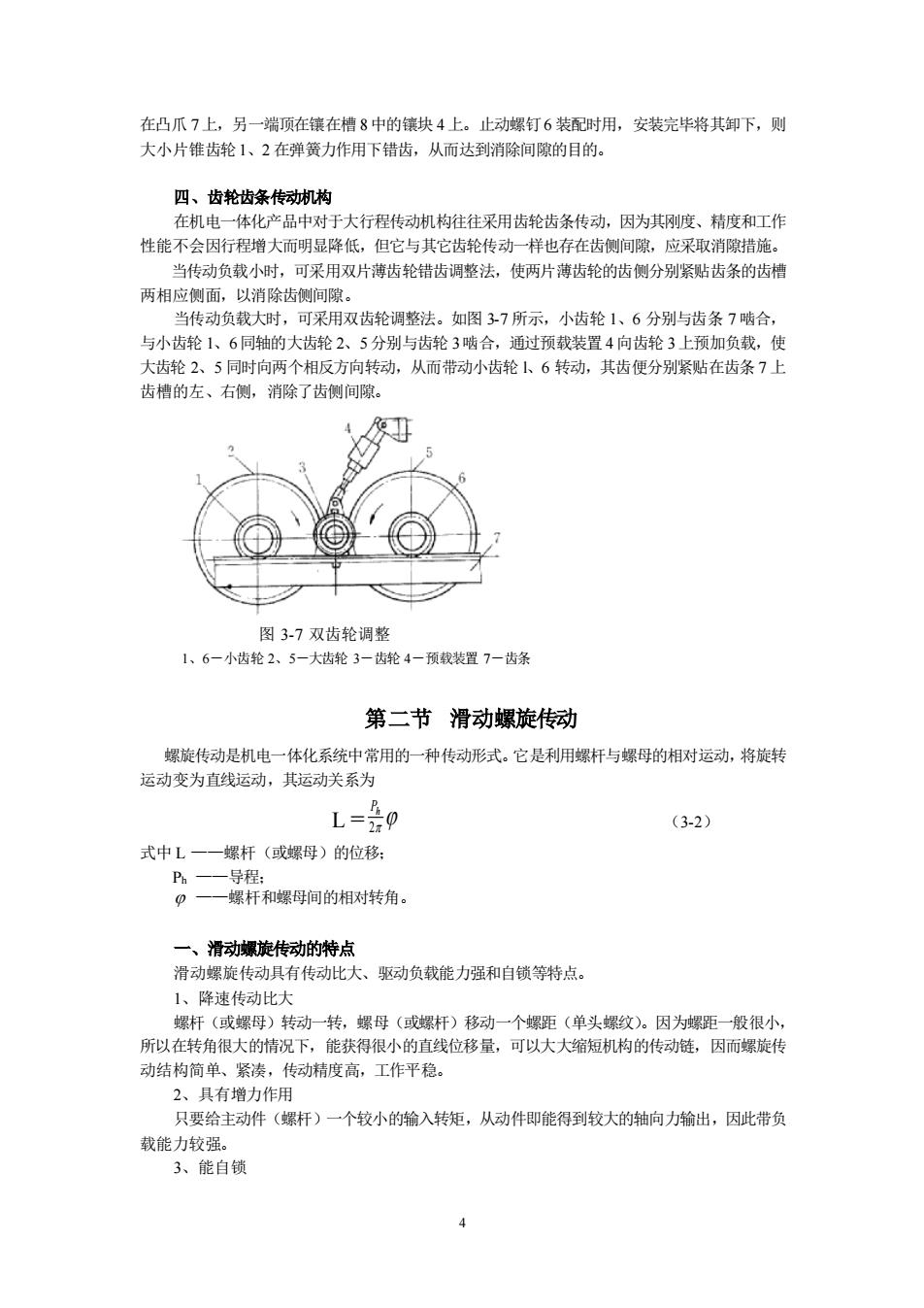
4 在凸爪 7上,另一端顶在镶在槽 8中的镶块 4上。止动螺钉6 装配时用,安装完毕将其卸下,则 大小片锥齿轮1、2 在弹簧力作用下错齿,从而达到消除间隙的目的。 四、齿轮齿条传动机构 在机电一体化产品中对于大行程传动机构往往采用齿轮齿条传动,因为其刚度、精度和工作 性能不会因行程增大而明显降低,但它与其它齿轮传动一样也存在齿侧间隙,应采取消隙措施。 当传动负载小时,可采用双片薄齿轮错齿调整法,使两片薄齿轮的齿侧分别紧贴齿条的齿槽 两相应侧面,以消除齿侧间隙。 当传动负载大时,可采用双齿轮调整法。如图 3-7 所示,小齿轮 1、6 分别与齿条 7 啮合, 与小齿轮 1、6同轴的大齿轮 2、5分别与齿轮 3啮合,通过预载装置 4向齿轮 3上预加负载,使 大齿轮 2、5 同时向两个相反方向转动,从而带动小齿轮 l、6 转动,其齿便分别紧贴在齿条 7 上 齿槽的左、右侧,消除了齿侧间隙。 图 3-7 双齿轮调整 1、6-小齿轮 2、5-大齿轮 3-齿轮 4-预载装置 7-齿条 第二节 滑动螺旋传动 螺旋传动是机电一体化系统中常用的一种传动形式。它是利用螺杆与螺母的相对运动,将旋转 运动变为直线运动,其运动关系为 L = 2 Ph (3-2) 式中 L ——螺杆(或螺母)的位移; Ph ——导程; ——螺杆和螺母间的相对转角。 一、滑动螺旋传动的特点 滑动螺旋传动具有传动比大、驱动负载能力强和自锁等特点。 1、降速传动比大 螺杆(或螺母)转动一转,螺母(或螺杆)移动一个螺距(单头螺纹)。因为螺距一般很小, 所以在转角很大的情况下,能获得很小的直线位移量,可以大大缩短机构的传动链,因而螺旋传 动结构简单、紧凑,传动精度高,工作平稳。 2、具有增力作用 只要给主动件(螺杆)一个较小的输入转矩,从动件即能得到较大的轴向力输出,因此带负 载能力较强。 3、能自锁
当螺旋线升角小于摩擦角时,螺旋传动具有自锁作用。 4。效率低 磨损快 由于螺旋 工作面为滑动摩擦,致使其传动效率低(约30%~40%),磨损快,因此不适于高 速和大功率传动。 二、滑动螺旋传动的形式及应用 滑动螺旋传动主要有以下两种基本型式。 螺母固 螺杆转动并移 如图3-8所示,这种传动型式的螺母本身就起者支承作用,从而简化了结构,消除了螺杆 轴承之间可能产生的轴向窜动,容易获得较高的传动精度。缺点是所占轴向尺寸较大(螺杆行程 的两倍加上螺母高度),刚性较差。因此仅适用于行程短的情况。 ) b) 图3-8滑动螺旋传动的基本型式 2、螺杆转动,螺母移 如图3-8b所示,这种传动型式的特点是结构紧凑(所占轴向尺寸取决于螺母高度及行程大 小),刚度较大。适用于工作行程较长的情况。 图3-9差动螺旋原理 除上述两种基本传动型式外,还有一种螺旋传动一一差动螺旋传动。其原理如图39所示 设螺杆3左、 右两段螺纹的旋向相同,且导程分别为P和PA2。 当螺 )角时,可动螺母 的移动距离为 I=是(P1-P2) (3-3) 如果P,与P,相弟很小,则L很小。因此苏动螺旋常用于各种微动装置中 若螺杆3左、右两段螺纹的旋向相反,则当螺杆转动角时,可动螺母2的移动距离为 I=品(P1+P2) (3-4) 可见,此时差动螺旋变成快速移动螺旋,即螺母2相对螺母1快速趋近或离开。这种螺旋装 置用于要求快速夹紧的夹只或锁紧装置中。 三、螺旋副零件与滑板联按结构的确定 螺旋副零件与滑板的联接结构对螺旋刷的磨损有直接影形响,设计时应注意。常见的联接结构 有下列几种:
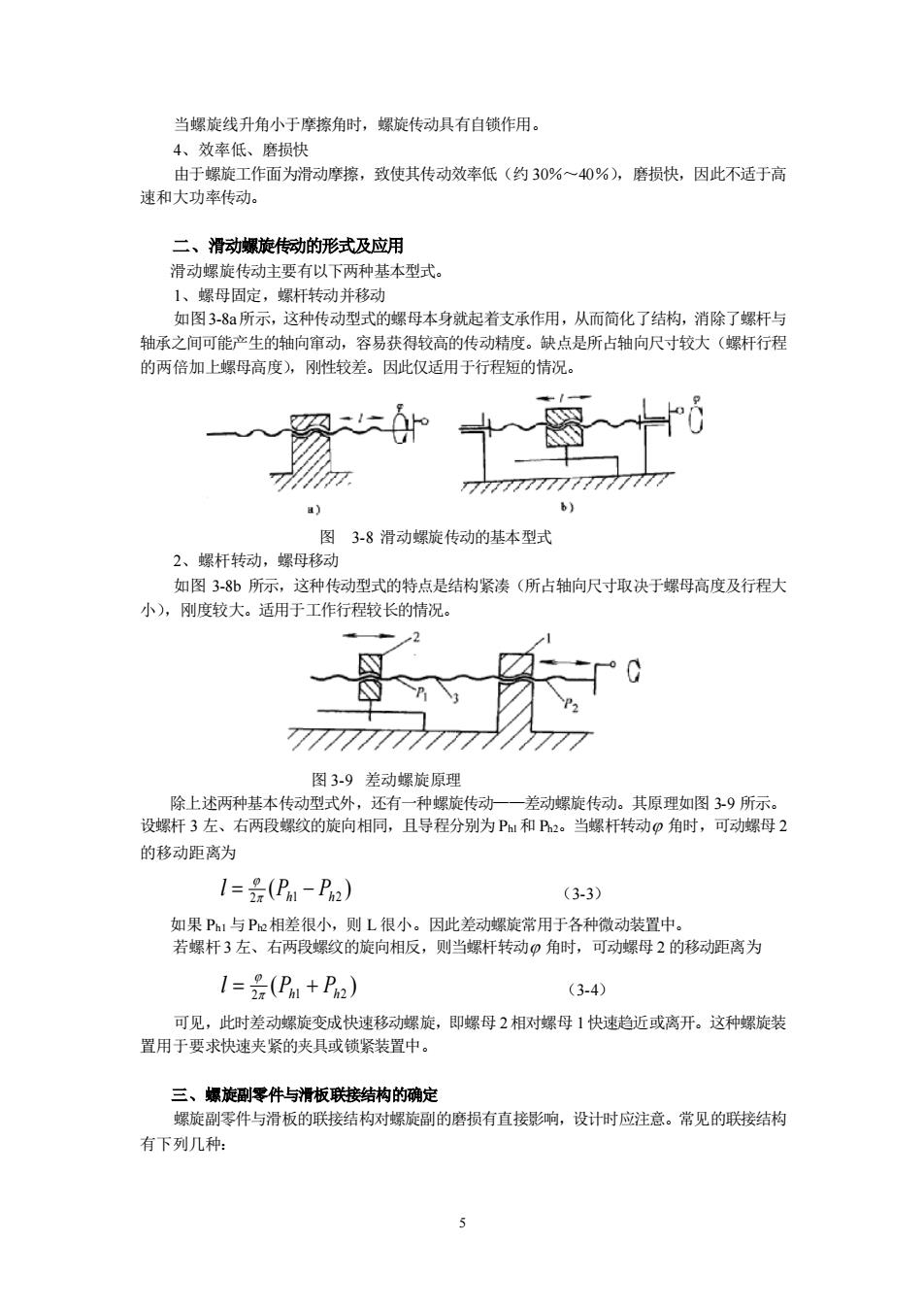
5 当螺旋线升角小于摩擦角时,螺旋传动具有自锁作用。 4、效率低、磨损快 由于螺旋工作面为滑动摩擦,致使其传动效率低(约 30%~40%),磨损快,因此不适于高 速和大功率传动。 二、滑动螺旋传动的形式及应用 滑动螺旋传动主要有以下两种基本型式。 1、螺母固定,螺杆转动并移动 如图3-8a所示,这种传动型式的螺母本身就起着支承作用,从而简化了结构,消除了螺杆与 轴承之间可能产生的轴向窜动,容易获得较高的传动精度。缺点是所占轴向尺寸较大(螺杆行程 的两倍加上螺母高度),刚性较差。因此仅适用于行程短的情况。 图 3-8 滑动螺旋传动的基本型式 2、螺杆转动,螺母移动 如图 3-8b 所示,这种传动型式的特点是结构紧凑(所占轴向尺寸取决于螺母高度及行程大 小),刚度较大。适用于工作行程较长的情况。 图 3-9 差动螺旋原理 除上述两种基本传动型式外,还有一种螺旋传动——差动螺旋传动。其原理如图 3-9 所示。 设螺杆 3 左、右两段螺纹的旋向相同,且导程分别为 Ph1和 Ph2。当螺杆转动 角时,可动螺母 2 的移动距离为 ( ) 2 Ph1 Ph2 l = − (3-3) 如果 Ph1 与Ph2相差很小,则 L 很小。因此差动螺旋常用于各种微动装置中。 若螺杆3 左、右两段螺纹的旋向相反,则当螺杆转动 角时,可动螺母 2 的移动距离为 ( ) 2 Ph1 Ph2 l = + (3-4) 可见,此时差动螺旋变成快速移动螺旋,即螺母 2相对螺母 1快速趋近或离开。这种螺旋装 置用于要求快速夹紧的夹具或锁紧装置中。 三、螺旋副零件与滑板联接结构的确定 螺旋副零件与滑板的联接结构对螺旋副的磨损有直接影响,设计时应注意。常见的联接结构 有下列几种: