第六章伺服控制系统 第一节概述 伺服控制系统是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度及动力 输出的自动控制系统。如防空雷达控制就是一个典型的同服控制过程,它是以空中的目标为输入 指令要求,雷达天线要一直跟踪目标,为地面炮台提供目标方位:加工中心的机械制造过程也是 同服控制过程,位移传感器不断地将刀具进给的位移传送给计算机,通过与加工位置目标比较, 计算机输出继续加工或停止加工的控制信号。绝大部分机电一体化系统都具有同服功能,机电 体化系统中的同服控制是为执行机构按设计要求实现运动而提供控制和动力的重要环节。 一、伺服系统的结构组成 机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,同服控制 系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。如图61给出了系 统组成原理框图。 1、比较环节是将输入的指令信号与系 黔器一即朝開 统的反馈信号进行比较,以获得输出与输入间 的偏差信号的环节,通常由专门的电路或计算 机来实现。 2、控制器通常是计算机或PD控制电 图6.1同服系统组成原理框图 路,主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。 3、执行元件作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被 控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动同服机构等。 4、被控对象 是指被控制的机构或装置,是直接完成系统目的的主体。一般包括传动系统、 执行装置和负载。 5、检测环节是指能够对输出进行测量,并转换成比较环节所需要的量纲的装置。一般包 括传感器和转换电路。 在实际的同服控制系统中,上述的每个环节在硬件特征上并不独立,可能几个环节在一个硬 件中,如测速直流电机即是执行元件又是检测元件。 二、何服系统的分类 同服系统的分类方法很多,常见的分类方法有: 1、按被控量参数特性分类按被控量不同,机电一体化系统可分为位移、速度、力矩等名 种伺服系统。其它系统还有温度、湿度、磁场、光等各种参数的同服系统 2、按驱动元件的类型分类按驱动元件的不同可分为电气伺服系统、液压伺服系统、气动 同服系统。电气伺服系统根据电机类型的不同又可分为直流伺服系统、交流伺服系统和步进电机 控制伺服系统。 3、按控制原理分类按自动控制原理,伺服系统又可分为开环控制同服系统、闭环控制同 服系统和半闭环控制同服系统 开环控制同服系统结构简单、成本低震、易于维护,但由于没有检测环节,系统精度低、抗 干扰能力差。闭环控制同服系统能及时对输出进行检测,并根据输出与输入的偏差,实时调整执 行过程,因此系统精度高,但成本也大幅提高。半闭环控制同服系统的检测反馈环节位于执行机
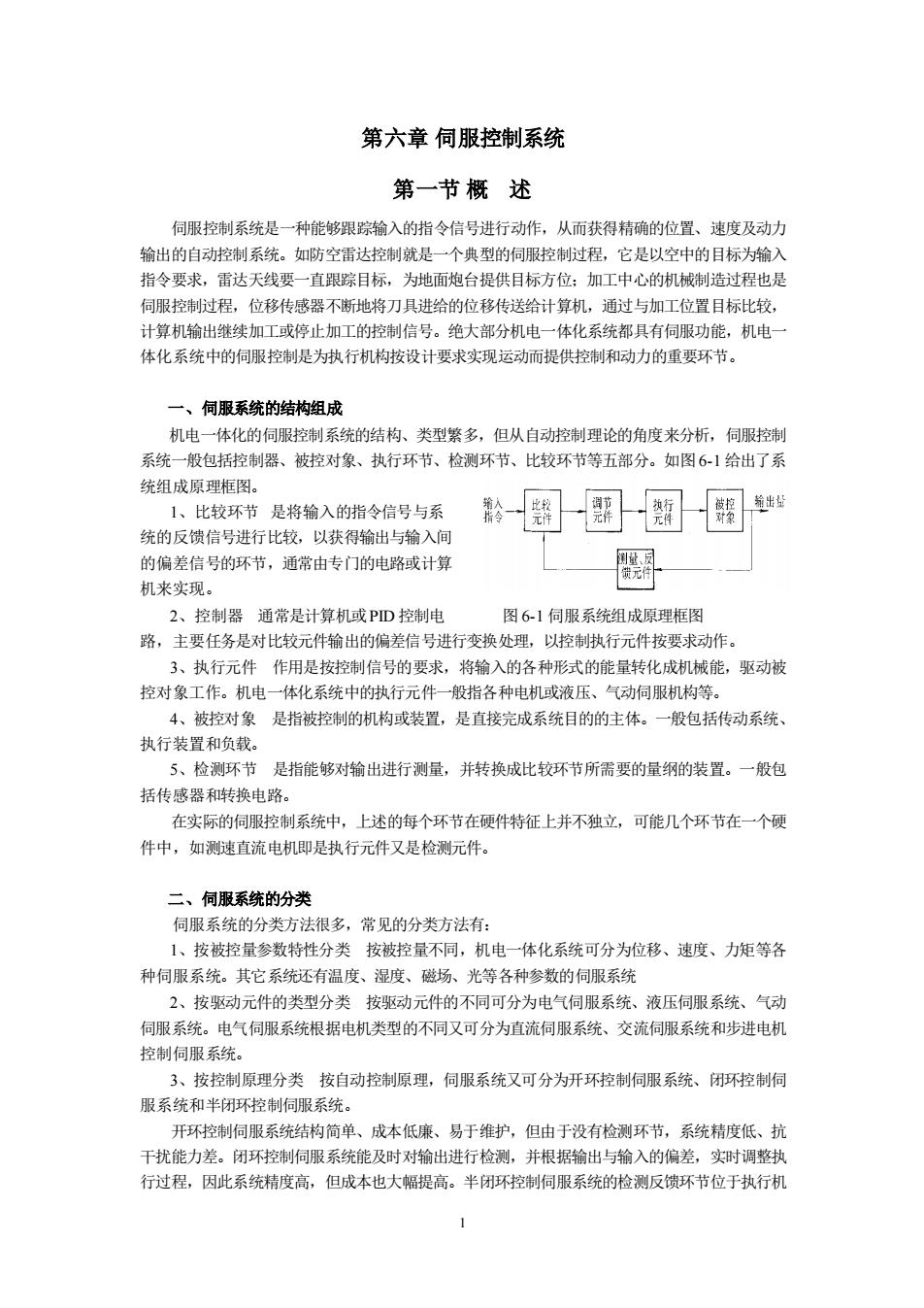
1 第六章 伺服控制系统 第一节 概 述 伺服控制系统是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度及动力 输出的自动控制系统。如防空雷达控制就是一个典型的伺服控制过程,它是以空中的目标为输入 指令要求,雷达天线要一直跟踪目标,为地面炮台提供目标方位;加工中心的机械制造过程也是 伺服控制过程,位移传感器不断地将刀具进给的位移传送给计算机,通过与加工位置目标比较, 计算机输出继续加工或停止加工的控制信号。绝大部分机电一体化系统都具有伺服功能,机电一 体化系统中的伺服控制是为执行机构按设计要求实现运动而提供控制和动力的重要环节。 一、伺服系统的结构组成 机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制 系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。如图 6-1 给出了系 统组成原理框图。 1、比较环节 是将输入的指令信号与系 统的反馈信号进行比较,以获得输出与输入间 的偏差信号的环节,通常由专门的电路或计算 机来实现。 2、控制器 通常是计算机或PID 控制电 图 6-1 伺服系统组成原理框图 路,主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。 3、执行元件 作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被 控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。 4、被控对象 是指被控制的机构或装置,是直接完成系统目的的主体。一般包括传动系统、 执行装置和负载。 5、检测环节 是指能够对输出进行测量,并转换成比较环节所需要的量纲的装置。一般包 括传感器和转换电路。 在实际的伺服控制系统中,上述的每个环节在硬件特征上并不独立,可能几个环节在一个硬 件中,如测速直流电机即是执行元件又是检测元件。 二、伺服系统的分类 伺服系统的分类方法很多,常见的分类方法有: 1、按被控量参数特性分类 按被控量不同,机电一体化系统可分为位移、速度、力矩等各 种伺服系统。其它系统还有温度、湿度、磁场、光等各种参数的伺服系统 2、按驱动元件的类型分类 按驱动元件的不同可分为电气伺服系统、液压伺服系统、气动 伺服系统。电气伺服系统根据电机类型的不同又可分为直流伺服系统、交流伺服系统和步进电机 控制伺服系统。 3、按控制原理分类 按自动控制原理,伺服系统又可分为开环控制伺服系统、闭环控制伺 服系统和半闭环控制伺服系统。 开环控制伺服系统结构简单、成本低廉、易于维护,但由于没有检测环节,系统精度低、抗 干扰能力差。闭环控制伺服系统能及时对输出进行检测,并根据输出与输入的偏差,实时调整执 行过程,因此系统精度高,但成本也大幅提高。半闭环控制伺服系统的检测反馈环节位于执行机
构的中间输出上,因此一定程度上提高了系统的性能。如位移控制问服系统中,为了提高系统的 动态性能,增设的电机速度检测和控制就属于半闭环控制环节 三、伺服系统的技术要求 机电一休化伺服系统要求具有精度高、响应速度快、稳定性好、负载能力强和工作频率范围 大等基本要求,同时还要求体积小、重量轻、可靠性高和成本低等。 1、系统精度 伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,即动态误着 稳态误差静态误差。稳定的伺服系统对输入变化是以一种振荡衰减的形式反映出来,振荡的幅 度和过程产生了系统的动态误差:当系统振荡衰减到一定程度以后,我们称其为稳态,此时的系 统误差就是稳态误差:由设备自身零件精度和装配精度所决定的误差通常指静态误差。 2、稳定性 伺服系统的稳定性是指当作用在系统上的干扰消失以后,系统能多恢复到原来稳定状态的能 力:或者当给系统一个新的输入指令后,系统达到新的稳定运行状态的能力。如果系统能够进 稳定状态,且过程时间短,则系统稳定性好:否则,若系统振荡越来越强烈,或系统进入等幅损 荡状态,则属于不稳定系统。机电一体化伺服系统通常要求较高的稳定性。 3、响应特性 响应特性指的是输出量跟随输入指令变化的反应速度,决定了系统的工作效率。响应速度与 许多因素有关,如计算机的运行速度、运动系统的阻尼、质量等。 4、工作频率 工作频率通常是指系统允许输入信号的频率范围。当工作频率信号输入时,系统能够按技术 要求正常工作:而其它须率信号输入时,系统不能正常工作。在机电一体化系统中,工作频率 般指的是执行机构的运行速度。 上述的四项特性是相互关联的,是系统动态特性的表现特征。利用自动控制理论来研究、分析 所设计系统的频率特性,就可以确定系统的各项动态指标。系统设计时,在满足系统工作要求(包 括工作频率)的前提下,首先要保证系统的稳定性和精度,并尽量提高系统的响应速度。 第二节执行元件 一、执行元件的分类及其特点 执行元件是能量变换元件,目的是控制机械执行机构运动。机电一体化伺服系统要求执行元 件具有转动惯量小、输出动力大、便于控制、可靠性高和安装维护简便等特点。根据使用能量的 不同,可以将执行元件分为电气式、液压式和气动式等几种类型。如图6-2所示。 1、电气式执行元件是将电能转化成电磁力,并用电磁力驱动执行机构运动。如交流电机 直流电机力矩电机、步进电机等。对控制用电机性能除要求稳速运转之外,还要求加速、减速性 能和伺服性能,以及频繁使用时的适应性和便于维护性。 电气执行元件的特点是操作简便、便于控制、能实现定位伺服、响应快、体积小、动力较大 和无污染等优点,但过载能力差、易于烧毁线圈、容易受噪声干扰。 2、液压式执行元件是先将电能变化成液体压力,并用电磁阀控制压力油的流向,从而使液 压执行元件驱动执行机构运动。液压式执行元件有直线式油缸、回转式油缸、液压马达等。 液压执行元件的特点是输出功率大、速度快、动作平稳、可实现定位伺服、响应特性好和过 载能力强。缺点是体积庞大、介质要求高、易泄露和环墙污染。 3、气压式执行元件与液压式执行元件的原理相同,只是介质由液体改为气体。气压式执行
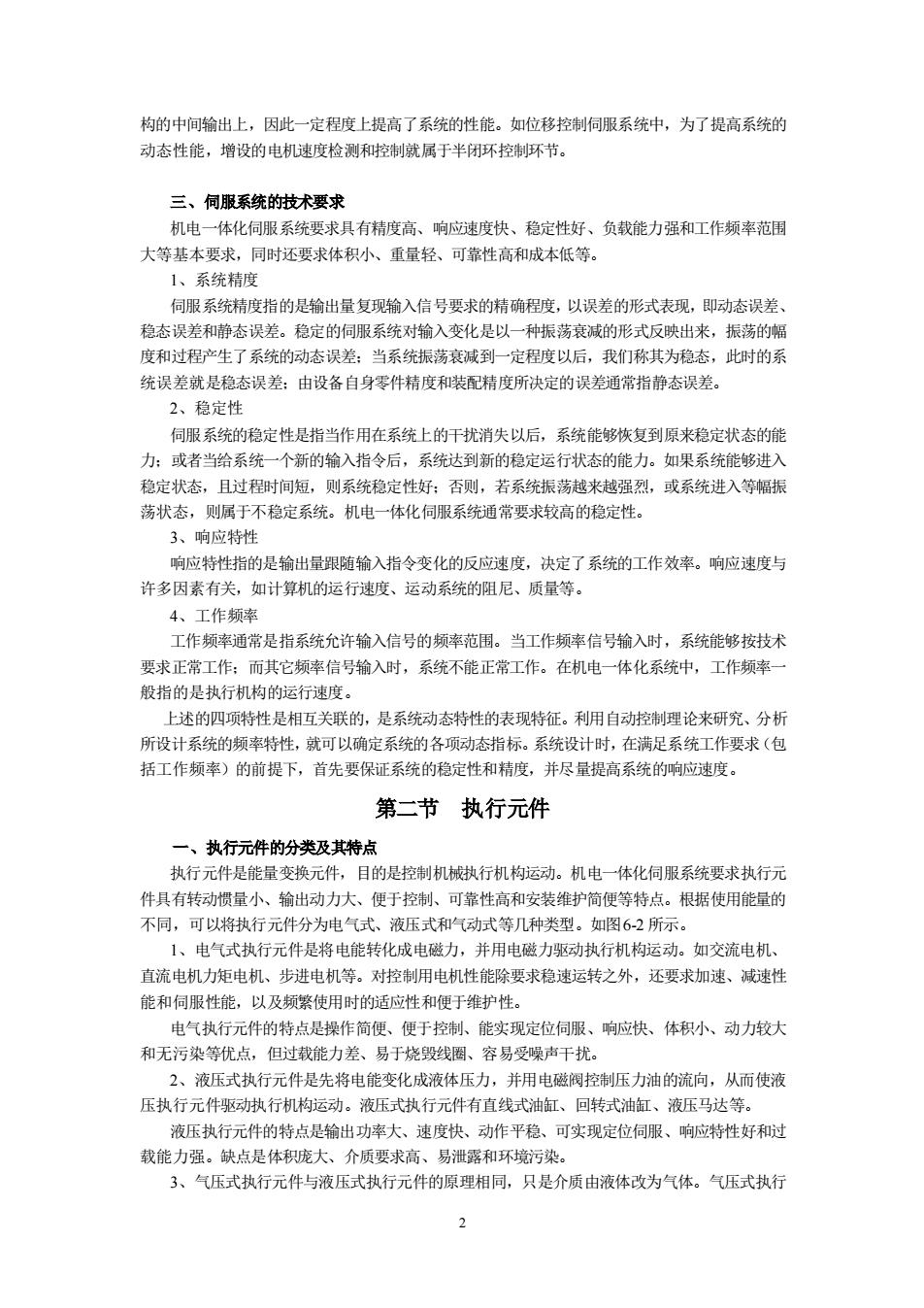
2 构的中间输出上,因此一定程度上提高了系统的性能。如位移控制伺服系统中,为了提高系统的 动态性能,增设的电机速度检测和控制就属于半闭环控制环节。 三、伺服系统的技术要求 机电一体化伺服系统要求具有精度高、响应速度快、稳定性好、负载能力强和工作频率范围 大等基本要求,同时还要求体积小、重量轻、可靠性高和成本低等。 1、系统精度 伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,即动态误差、 稳态误差和静态误差。稳定的伺服系统对输入变化是以一种振荡衰减的形式反映出来,振荡的幅 度和过程产生了系统的动态误差;当系统振荡衰减到一定程度以后,我们称其为稳态,此时的系 统误差就是稳态误差;由设备自身零件精度和装配精度所决定的误差通常指静态误差。 2、稳定性 伺服系统的稳定性是指当作用在系统上的干扰消失以后,系统能够恢复到原来稳定状态的能 力;或者当给系统一个新的输入指令后,系统达到新的稳定运行状态的能力。如果系统能够进入 稳定状态,且过程时间短,则系统稳定性好;否则,若系统振荡越来越强烈,或系统进入等幅振 荡状态,则属于不稳定系统。机电一体化伺服系统通常要求较高的稳定性。 3、响应特性 响应特性指的是输出量跟随输入指令变化的反应速度,决定了系统的工作效率。响应速度与 许多因素有关,如计算机的运行速度、运动系统的阻尼、质量等。 4、工作频率 工作频率通常是指系统允许输入信号的频率范围。当工作频率信号输入时,系统能够按技术 要求正常工作;而其它频率信号输入时,系统不能正常工作。在机电一体化系统中,工作频率一 般指的是执行机构的运行速度。 上述的四项特性是相互关联的,是系统动态特性的表现特征。利用自动控制理论来研究、分析 所设计系统的频率特性,就可以确定系统的各项动态指标。系统设计时,在满足系统工作要求(包 括工作频率)的前提下,首先要保证系统的稳定性和精度,并尽量提高系统的响应速度。 第二节 执行元件 一、执行元件的分类及其特点 执行元件是能量变换元件,目的是控制机械执行机构运动。机电一体化伺服系统要求执行元 件具有转动惯量小、输出动力大、便于控制、可靠性高和安装维护简便等特点。根据使用能量的 不同,可以将执行元件分为电气式、液压式和气动式等几种类型。如图6-2 所示。 1、电气式执行元件是将电能转化成电磁力,并用电磁力驱动执行机构运动。如交流电机、 直流电机力矩电机、步进电机等。对控制用电机性能除要求稳速运转之外,还要求加速、减速性 能和伺服性能,以及频繁使用时的适应性和便于维护性。 电气执行元件的特点是操作简便、便于控制、能实现定位伺服、响应快、体积小、动力较大 和无污染等优点,但过载能力差、易于烧毁线圈、容易受噪声干扰。 2、液压式执行元件是先将电能变化成液体压力,并用电磁阀控制压力油的流向,从而使液 压执行元件驱动执行机构运动。液压式执行元件有直线式油缸、回转式油缸、液压马达等。 液压执行元件的特点是输出功率大、速度快、动作平稳、可实现定位伺服、响应特性好和过 载能力强。缺点是体积庞大、介质要求高、易泄露和环境污染。 3、气压式执行元件与液压式执行元件的原理相同,只是介质由液体改为气体。气压式执行
元件的特点是介质来源方便、成本低、速度快、无环境污染,但功率较小、动作不平稳、有噪声, 难于伺服 且数机 电式 交流(AC)相跟皂机 电这疾及其它 直流(X服生机 油数 步进电祝 液正式 压马达 其它电桃 双金屏片 气压武 气亚马达 无状记忆合全 其它 与料有关 压电元作 图6-2执行元件的种类 在闭环或半闭环控制的伺服系统中,主要采用直流伺服电动机、交流伺服电动机或伺服阀控 制的液压同服马达作为执行元件。液压伺服马达主要用在负载较大的大型同服系统中,在中、小 型伺服系统中,则多数采用直流或交流伺服电动机。由于直流伺服电动机具有优良的静、动态特 性,并且易于控制,因而在20世纪90年代以前,一直是闭环系统中执行元件的主流。近年来, 由于交流同服技术的发展,使交流同服电动机可以获得与直流伺服电动机相近的优良性能,而且 交流伺服电动机无电刷磨损问题,维修方便,随若价格的逐年降低,正在得到越来越广泛的应用, 因而目前己形成了与直流伺服电动机共同竞争市场的局面。在闭环伺服系统设计时,应根据设计 者对技术的学握程度及市场供应、价格等情况,适当选取合适的执行元件。 二、直流间服电动机 直流伺服电机具有良好的调速特性,较大的启动转矩和相对功率,易于控制及响应快等优点。 尽管其结构复杂,成本较高,在机电一体化控制系统中还是具有较广泛的应用。 1、直流伺服电动机的分类 直流同服电动机按励磁方式可分为电磁式和永水酸式两种。电酸式的磁场由励磁绕组产生:水 磁式的磁场由永磁体产生。电磁式直流伺服电动机是一种普遍使用的同服电动机,特别是大功率 电机(100W以上)。永磁式伺服电动机具有体积小、转矩大、力矩和电流成正比、同服性能好、 响应快功率体积比大、功率重量比大、稳定性好等优点。由于功率的限制,目前主要应用在办公 自动化、家用电气、仪器仪表等领域。 直流同服电动机按电枢的结构与形状又可分为平滑电枢型、空心电枢型和有槽电枢型等。平 滑电枢型的电枢无槽,其绕组用环氧树脂粘固在电枢铁心上,因而转子形状细长,转动惯量小。 空心电枢型的电枢无铁心,且常做成杯形,其转子转动惯量最小。有槽电枢型的电枢与普通直流
3 元件的特点是介质来源方便、成本低、速度快、无环境污染,但功率较小、动作不平稳、有噪声、 难于伺服。 图 6-2 执行元件的种类 在闭环或半闭环控制的伺服系统中,主要采用直流伺服电动机、交流伺服电动机或伺服阀控 制的液压伺服马达作为执行元件。液压伺服马达主要用在负载较大的大型伺服系统中,在中、小 型伺服系统中,则多数采用直流或交流伺服电动机。由于直流伺服电动机具有优良的静、动态特 性,并且易于控制,因而在20世纪 90 年代以前,一直是闭环系统中执行元件的主流。近年来, 由于交流伺服技术的发展,使交流伺服电动机可以获得与直流伺服电动机相近的优良性能,而且 交流伺服电动机无电刷磨损问题,维修方便,随着价格的逐年降低,正在得到越来越广泛的应用, 因而目前已形成了与直流伺服电动机共同竞争市场的局面。在闭环伺服系统设计时,应根据设计 者对技术的掌握程度及市场供应、价格等情况,适当选取合适的执行元件。 二、直流伺服电动机 直流伺服电机具有良好的调速特性,较大的启动转矩和相对功率,易于控制及响应快等优点。 尽管其结构复杂,成本较高,在机电一体化控制系统中还是具有较广泛的应用。 1、直流伺服电动机的分类 直流伺服电动机按励磁方式可分为电磁式和永磁式两种。电磁式的磁场由励磁绕组产生;永 磁式的磁场由永磁体产生。电磁式直流伺服电动机是一种普遍使用的伺服电动机,特别是大功率 电机(100W 以上)。永磁式伺服电动机具有体积小、转矩大、力矩和电流成正比、伺服性能好、 响应快功率体积比大、功率重量比大、稳定性好等优点。由于功率的限制,目前主要应用在办公 自动化、家用电气、仪器仪表等领域。 直流伺服电动机按电枢的结构与形状又可分为平滑电枢型、空心电枢型和有槽电枢型等。平 滑电枢型的电枢无槽,其绕组用环氧树脂粘固在电枢铁心上,因而转子形状细长,转动惯量小。 空心电枢型的电枢无铁心,且常做成杯形,其转子转动惯量最小。有槽电枢型的电枢与普通直流
电动机的电枢相同,因而转子转动惯量较大。 直流伺服电动机还可按转子转动惯量的大小而分成大惯量、中惯量和小惯量直流伺服电 机。大惯量直流伺服电动机(又称直流力矩伺服电动机)负载能力强,易于与机械系统匹配,而小 惯量直流伺服电动机的加减速能力强、响应速度快、动态特性好 2、直流伺服电动机的基本结构及工作原理 直流伺服电动机主要由磁极、电枢、电刷及换向片结构组成(如图6-3所示)。其中磁极在工 作中固定不动,故又称定子。定子磁极用于产生磁场。在永磁式直流同服电动机中,磁极采用永 磁材料制成,充磁后即可产生恒定磁场。在他励式直流伺服电动机中,磁极由冲压硅钢片叠成 外绕线圈,靠外加励磁电流才能产生磁场。电枢是直流同服电动机中的转动部分,故又称转子 它由硅钢片叠成,表面嵌有线圈,通过电刷和换向片与外加电枢电源相连。 极 电框导件 磁极 图63直流伺服电动机基本结构 图6-4电枢等效电路 直流伺服电动机是在定子磁场的作用下,使通有直流电的电枢(转子)受到电磁转矩的驱使, 带动负载旋转。通过控制电枢绕组中电流的方向和大小,就可以控制直流伺服电动机的旋转方向 和速度。当电枢绕组中电流为零时,伺服电动机则静止不动: 直流伺服电动机的控制方式主要有两种:一种是电枢电压控制,即在定子磁场不变的情况下 通过控制施加在电枢绕组两端的电压信号来控制电动机的转速和输出转矩;另一种是励磁磁场控 制,即通过以改变励磁电流的大小来政变定子磁场强度,从而控制电动机的转速和输出转矩。 采用电枢电压控制方式时,由于定子磁场保持不变,其电枢电流可以达到额定值,相应的输 出转矩也可以达到额定值,因而这种方式又被称为恒转矩调速方式。而采用励磁破场控制方式时, 由于电动机在额定运行条件下磁场己接近饱和,因而只能通过减弱感场的方法来改变电动机的转 速。由于电枢电流不允许超过额定值,因而随若磁场的减弱,电动机转速增加,但输出转矩下降。 输出功率保持不变,所以这种方式又被称为恒功率调速方式。 3、直流伺服由动机的特性分析 直流伺服电动机采用电枢电压控制时的电枢等效电路如图64所示 当电动机处于稳态运行时,回路中的电流I。保持不变,则电枢回路中的电压平衡方程式为 E=U。-1R (6-1) 式中,E。是电枢反电动势:U。是电枢电压:I是电枢电流:R。是电枢电阻。 转子在破场中以角速度⊙切制磁力线时,电枢反电动势E。与角速度0之间存在如下关系: 4
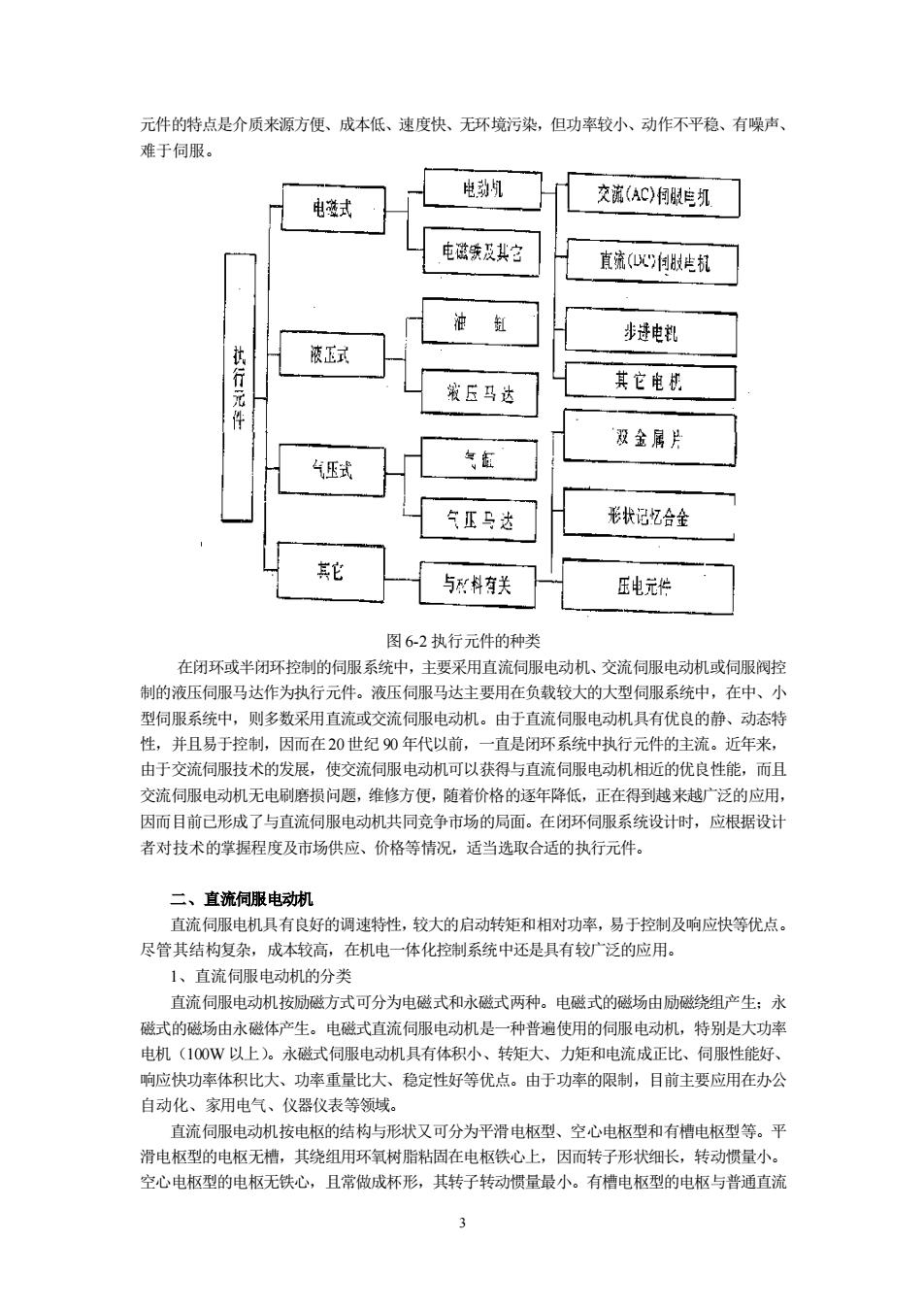
4 电动机的电枢相同,因而转子转动惯量较大。 直流伺服电动机还可按转子转动惯量的大小而分成大惯量、中惯量和小惯量直流伺服电动 机。大惯量直流伺服电动机(又称直流力矩伺服电动机)负载能力强,易于与机械系统匹配,而小 惯量直流伺服电动机的加减速能力强、响应速度快、动态特性好 2、直流伺服电动机的基本结构及工作原理 直流伺服电动机主要由磁极、电枢、电刷及换向片结构组成(如图6-3所示)。其中磁极在工 作中固定不动,故又称定子。定子磁极用于产生磁场。在永磁式直流伺服电动机中,磁极采用永 磁材料制成,充磁后即可产生恒定磁场。在他励式直流伺服电动机中,磁极由冲压硅钢片叠成, 外绕线圈,靠外加励磁电流才能产生磁场。电枢是直流伺服电动机中的转动部分,故又称转子, 它由硅钢片叠成,表面嵌有线圈,通过电刷和换向片与外加电枢电源相连。 图 6-3 直流伺服电动机基本结构 图 6-4 电枢等效电路 直流伺服电动机是在定子磁场的作用下,使通有直流电的电枢(转子)受到电磁转矩的驱使, 带动负载旋转。通过控制电枢绕组中电流的方向和大小,就可以控制直流伺服电动机的旋转方向 和速度。当电枢绕组中电流为零时,伺服电动机则静止不动。 直流伺服电动机的控制方式主要有两种:一种是电枢电压控制,即在定子磁场不变的情况下, 通过控制施加在电枢绕组两端的电压信号来控制电动机的转速和输出转矩;另一种是励磁磁场控 制,即通过改变励磁电流的大小来改变定子磁场强度,从而控制电动机的转速和输出转矩。 采用电枢电压控制方式时,由于定子磁场保持不变,其电枢电流可以达到额定值,相应的输 出转矩也可以达到额定值,因而这种方式又被称为恒转矩调速方式。而采用励磁磁场控制方式时, 由于电动机在额定运行条件下磁场已接近饱和,因而只能通过减弱磁场的方法来改变电动机的转 速。由于电枢电流不允许超过额定值,因而随着磁场的减弱,电动机转速增加,但输出转矩下降, 输出功率保持不变,所以这种方式又被称为恒功率调速方式。 3、直流伺服电动机的特性分析 直流伺服电动机采用电枢电压控制时的电枢等效电路如图6-4 所示。 当电动机处于稳态运行时,回路中的电流 a I 保持不变,则电枢回路中的电压平衡方程式为 a a aRa E =U − I (6-1) 式中, Ea 是电枢反电动势; U a 是电枢电压; a I 是电枢电流; Ra 是电枢电阻。 转子在磁场中以角速度 切割磁力线时,电枢反电动势 Ea 与角速度 之间存在如下关系:
E。=C.po (6-2) 式中,C是电动势常数,仅与电动机结构有关;Φ是定子磁场中每极气隙磁通量。 由(61)(62)得 U。-I.R=C.Φo (6-3) 此外,电枢电流切割磁场磁力线所产生的电磁转矩T,可由下式表达 T =Cl T 1,C (6-4) 式中,Cm是转矩常数,仅与电动机结构有关。 将(64)代入(63)并整理,可得到直流同服电动机运行特性的一般表达式 R 0=cs-cCuo Tm (6-5) 由此可以得出空载(T=0,转子惯量忽略不计)和电机启动(0=0)时的电机特性。 (1)当Tm=0时, 0=品 (6-6 0称为理想空载角速度。可见,角速度与电枢电压成正比。 (2)当0=0时, Tn=Ta=元U。 (6-7) T:称为启动解时转矩,其值也与电枢电压成正比。 如果把角速度)看作是电磁转矩T.的函数,即o=f(T),则可得到直流伺服电动机的机 械特性表达式 0=,-20T (6-8) 式中0,是数0=。 如果把角速度0看作是电枢电压U。的函数,即0=f(心。),则可得到直流伺服电动机的 调节特性表达式 0=Cs-kTm (6-9)
5 Ea = Ce (6-2) 式中,Ce是电动势常数,仅与电动机结构有关; 是定子磁场中每极气隙磁通量。 由(6-1)(6-2)得 Ua − I aRa = Ce (6-3) 此外,电枢电流切割磁场磁力线所产生的电磁转矩 Tm ,可由下式表达 m m a T = C I 则 = m m a C T I (6-4) 式中, Cm 是转矩常数,仅与电动机结构有关。 将(6-4)代入(6-3)并整理,可得到直流伺服电动机运行特性的一般表达式 C C m R C U T e m a e a 2 = − (6-5) 由此可以得出空载( Tm =0,转子惯量忽略不计)和电机启动( =0)时的电机特性。 (1)当 Tm =0 时, = e a C U (6-6) 称为理想空载角速度。可见,角速度与电枢电压成正比。 (2)当 =0 时, R a C Tm Td U a m = = (6-7) Td 称为启动瞬时转矩,其值也与电枢电压成正比。 如果把角速度 看作是电磁转矩 Tm 的函数,即 ( ) Tm = f ,则可得到直流伺服电动机的机 械特性表达式 C C m R T e m a 0 2 = − (6-8) 式中 0 是常数, = e a C U 0 。 如果把角速度 看作是电枢电压 U a 的函数,即 ( ) Ua = f ,则可得到直流伺服电动机的 调节特性表达式 C m U kT e a = − (6-9)