
2.7色彩传感器. 27 2.7.1色彩传感器的工作原理 2.7.2双结型色彩传感春的测色电塔 28 2.8光电传感器. 29 2.8.1 光敏电阻 2.8.2光电二减管和光电三极管.+. 30 2.8.3红外传感器 31 2.9其他传感器. .32 2.9.1温疮传观器++.4+ 32 2.9.2气敏传感程. 2.10信号处理. 2.10.】开关量接口电路 2.10.2模拟信哥的输入 第3章执行装置及其驱动 3.】步进电动机及其驱动.4】 3.1.1步进电动机工作原理与分类 4 31.2步进电动机的性能指标. A3 3.1.3步进电动机驱动电源. 44 3.1.4步进电动机选型 48 3.1.5直线式步进电动机. 49 3.2直流服电动机及其驱动 50 3.2.】直流恫服电动视的分类. 50 3.22直流偏服电动机的机械特性和调节特性· 51 3.2.3堂流伺版电动机PWM控制原理. 52 3.2.4直流间服电动机豌动用集成电路. 53 3.2.5直流间廒电动观选型 55 3.3交流筒服电动机. 58 3.3.1交流间康电动机的发展 3.3.2交清间服中动机调谏方法,.,.,.58 3.3.3SPWM变调速 .60 3.31交流何服电动机的失量控制.64 3.3.5交流每服电动机的洗型. 66 3.4液压执行装置. 3.4.1液压执行机构. 67 3.4.2液压执行机构的驱动 10 70 3.5.1气动执行机构 3.5.2气动执行机构的驱动.*.*.+*71 3.6】压电执行装置
3.6.2物变形执行装置+.++.44.4.+.44.44*.+:73 3.6.3形状记亿合金扶行装置.73 3.7机械传动机构. 3.7.1谐波齿轮传动. 3.72同步传动 37.3演珠纯杯传动, 第4章工业控制计算机 78 4.1工业控制打算机的总线结构 .78 4.11泛线持术,+ 78 4.12工业标准总线 79 4,2工2PC机., 83 4.2.1 工业PC机的特点. 83 4.2.2工业控制机及外图接口产品. 83 4.2.3战入式工业PC一PC/104 81 4,3单片机. 87 4.3.1MCS51单片机组成控制系统 88 4.3.2单片花,控制系统信息输入通道设计. 89 4.3.3单片机控制系统功率驱动接口设计. 92 4.34单片机控制系统人机面设计. 4.3.5单片机应用系统设计. 4.3.6单片机应用系统实例. . 97 4.4可编程语辑控制器. 4.4.1P1.C的结构 . 102 4.4.2P1C的工作原理. 104 4.4.3P1C控制系统的设计方法和步. 105 4.5PLC应用实例. 107 4.6工业控制计管机的选型 .110 第5章光机电一体化系统的软件技术· 5.】光机电一体化系统的软件工程方法.。 .112 5.1.1软件工程方法 . 5.1.2 工控软件设计., 115 5.1.3组态软件. . 117 5.1.4铁入式操作系统. 118 52软件抗于扰技术. 21 5.2.1软件抗千扰 12 5.2.2数字滤波. 121 5.2.3编程举例 122 5.3数字PID算法. 125 5.3.1常规数字P1D算法 126 5.3.2数字PD的改进算法 129
5.3.3数字PD参数整定 135 5.1模糊控制技术. 138 5.4.1 引言 138 5,4.2模糊控制系统的组成及基本系理. 138 5.4.3模期化 139 5.4.1非模糊化. 141 5.4.行模糊控制规则. 142 5.5人工神经网络 142 5.5.1生物神经元的著本结格 .142 5.5.2 人工神经元的来本结村 143 5.5.3人工神经网络摸别., .144 5.5.4人工神经网络的学习 144 5.5.5误姜反向传播络及其学习.*.4. 145 5.5.6人工神经网络的特点和局限性 47 5.5.7 人工神经网络应用举例 147 第6章伺服系统设计. 151 61 伺原系统及其构成 51 6,2伺服系统的设计步骤和技术要求 151 6.2.1 何服系统的设计步 151 6.2.2间极系统的主要技术要求 152 6.3开环侗服系统设计 15 6.3.1开环伺服系统的稳态设计 183 6.3,2开环伺服系统的控制系统设计. .157 6.4闭环何服系统设计. 6.4.1闭环何服系统的构成.。 .158 6.4,2闭环服系统的稳态设计 158 6.4,3连娃间服系统的动水设 162 6.4.4连续伺服系统的动态设计实例 168 6.5数字侗服系统的设计.4 176 6.5.1数字伺服系统的结构形式 176 6.5,2数字何服系统的设计方法 177 6.6数字饲限系统设计实例. .187 第7章光机电一体化系统产品应用举例 19 7.1CT扫描机. 190 7.1.】简众 190 7.1.2Ct成像原理 190 7.1.3CT扫描机的构成 191 7.2 可视对讲门铃. 194 7.2.1可视对讲门铃功能 194 72.2可祝对讲门铃的组成
7.2.3可视对讲门铃的工作原理,.÷.+.+.+4.*.+:195 7.2.4控制电路的实现.197 7.2.5应用. 7.3全自动洗衣机 7.3.1 一般的全自动洗衣机简介 7.3.2模糊控制的全吉动洗衣机 199 7.4活塞外轮廓测量仪 202 7.4.1系统组成.44 203 71.2系结厦理 204 7.4.3系统软件设计 205 7.5智能比色温计. 207 7.5.1智能比色测温的织成 207 7.5.2智能比色测温计的原理 207 7.5.3 智能比色测温计的测温探头 208 75.招能比色测温计程序设计. 209 7.5.5其他产品衡介. 210 附录 213 张录】无源液正网络 213 昨录2有源校正网络. 215 附录3XF和XB系列被转变压器技术数据 444,218 CY系列直流永磁式测速发电机 218 班录5ZC℉系列直流测速发审机技术数焊 218 附录6反应式步进电动机技术性能数据 219 附录7BC系列磁阻式步进电动机效掘 219 附录886BYG步进电动机数据 20 附录9]10BYG步进电动机数指. 220 附录10571BY步讲中动机数. 220 附录11 稀土永磁材料的直流力矩电动视 221 附录12SZ系列直流电动机技木数据. 221 附录13LY系列直流力矩电动机技术数据. 223 雅录14交流间步间蛋电动机 224 附录15交流同步电动机 224 参考文献. 225
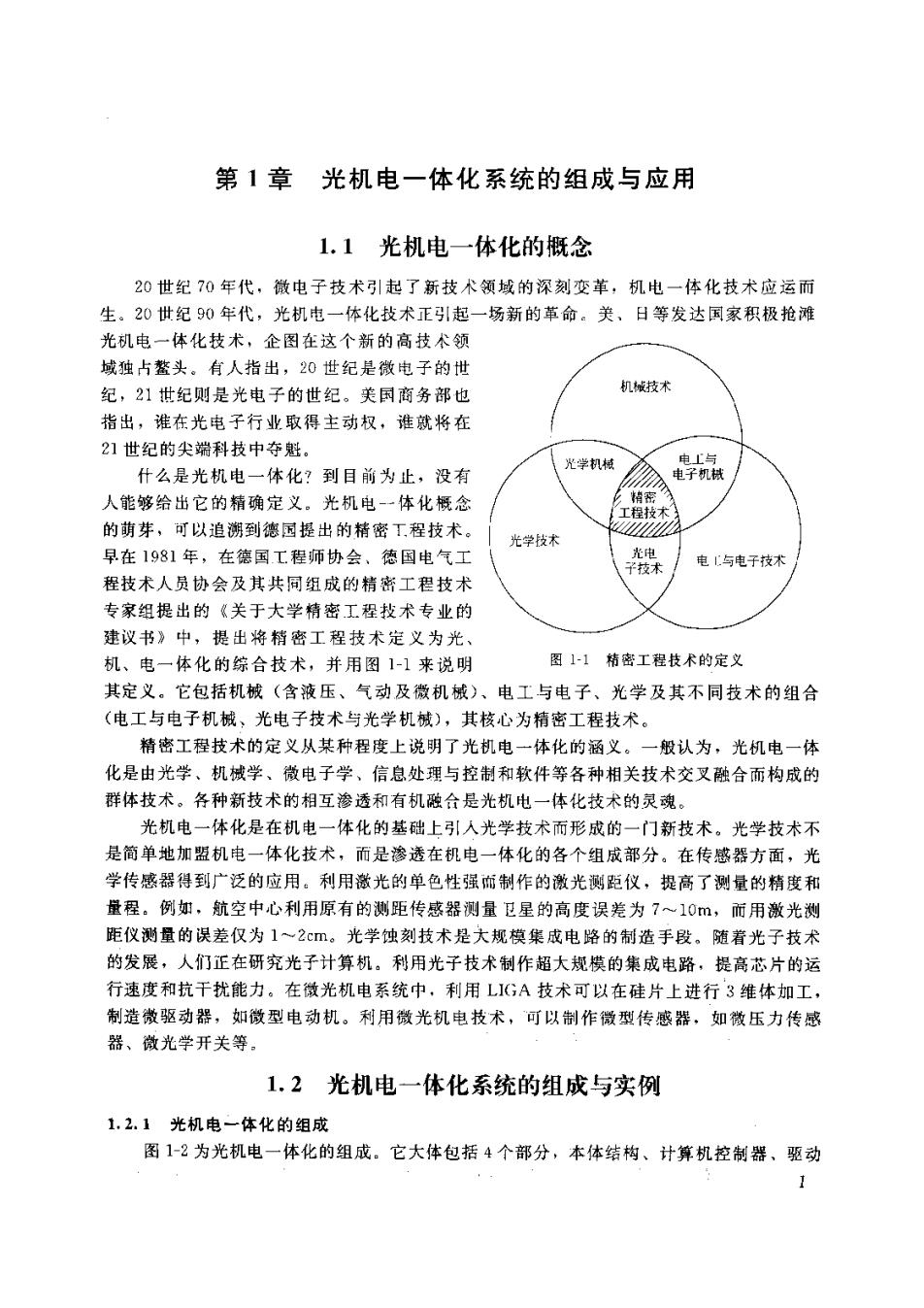
第1章光机电一体化系统的组成与应用 1.1光机电一体化的概念 20世纪?0年代,微电子技术引起了新技术领域的深刻变革,机电一体化技术应运而 生。20世纪90年代,光机电一体化技术正引起一场新的革命。美、日等发达国家积极抢滩 光机电一体化技术,企图在这个新的高技术领 域独占整头。有人指出,20世纪是微电子的世 纪,21世纪则是光电子的世纪。美国商务部也 机饭技不 指出,谁在光电子行业取得主动权,谁就将在 21世纪的尖端科技中夺躯。 光学机械 什么是光机电一休化?到目前为止,没有 人能够给出它的精确定义。光机电-一体化概念 的萌芽,可以追湖到德国提出的精密工程技术 光学枝术 早在1981年,在德国工程师协会、德国电气工 电与电子技术 程技术人员协会及其共同组成的精密工程技术 专家组提出的《关于大学精密工程技术专业的 建议书》中,提出将梢密工程技术定义为光 机、电一体化的综合技术,并用图1-1来说明 图-1精密工程技术的定义 其定义。它包括机械(含液压、气动及微机械)、电工与电子、光学及其不同技术的组合 《电工与电子机械、光电子技术与光学机械),其核心为精密工程技术。 精密工程技术的定义从某种程度上说明了光机电一体化的涵义。一般认为,光机电一体 化是由光学、机械学、微电子学、信息处理与控制和软件等各种相关技术交叉融合而构成的 群体技术。各种新技术的相互渗透和有机融合是光机电一体化技术的灵魂。 光机电一体化是在机电一体化的基础上引入光学技术而形成的一门新技术。光学技术不 是简单地加盟机电一体化技术,而是渗透在机电一体化的各个组成部分。在传感器方面,光 学传感器得到广泛的应用。利用滋光的单色性强而制作的激光测距仪,提高了测量的精度和 量程。例如,航空中心利用原有的测距传感器测量卫星的高度误差为7~10m,而用激光测 距仪测量的误差仅为1~2cm。光学蚀刻技术是大规模集戒电路的制造手段。随着光子技术 的发展,人们正在研究光子计算机。科用光子技术制作超大规模的集成电路,提高芯片的运 行速度和抗干扰能力。在做光机电系统中,利用LGA技术可以在硅片上进行3维体加工, 制造微驱动器,如微型电动机。利用微光机电技术,可以制作微型传感器,如微压力传感 器、微光学开关等. 1.2光机电一体化系统的组成与实例 1.2.1光机电一体化的组成 图12为光机电一体化的组成。它大体包括4个部分,本体结构、计算机控制器、驱动