系庭大学 Xinjiang University 电气工程学院运动控制系统 电力拖动自动控制条统—运动控制条统 第3章转速、电流反馈控制的直流调速系统
电力拖动自动控制系统—运动控制系统 第3章 转速、电流反馈控制的直流调速系统
新庭火学 电气工程学院运动控制系统 Xinjiang University 容提要 转速、电流反馈控制直流调速系统的组成及其静特性 转速、电流反馈控制直流调速系统的动态数学模型 转速、电流反馈控制直流调速系统调节器的工程设计方法 MATLAB仿真软件对转速、电流反馈控制的直流调速系 统的仿真
内 容 提 要 • 转速、电流反馈控制直流调速系统的组成及其静特性 • 转速、电流反馈控制直流调速系统的动态数学模型 • 转速、电流反馈控制直流调速系统调节器的工程设计方法 • MATLAB仿真软件对转速、电流反馈控制的直流调速系 统的仿真
系庭大学 Xinjiang University 电气工程学院运动控制系统 3.1转速、电流反馈控制直流调速系统的组成及其静特性 对于经常正、反转运行的调速系统,缩短起、制动过程的时间是 提高生产率的重要因素。 当到达稳态转速时, 在起动(或制动) 最好使电流立即降 过渡过程中,希 下来,使电磁转矩 望始终保持电流 与负载转矩相平衡 (电磁转矩)为 从而迅速转入稳态 允许的最大值, 运行。 使调速系统以最 大的加(减)速 /dm 度运行。 时间最优的理想过渡过程图 起动电流呈矩形波,转速按线性增长。这是在最大电流(转矩)受限制时调 速系统所能获得的最快的起动(制动)过程
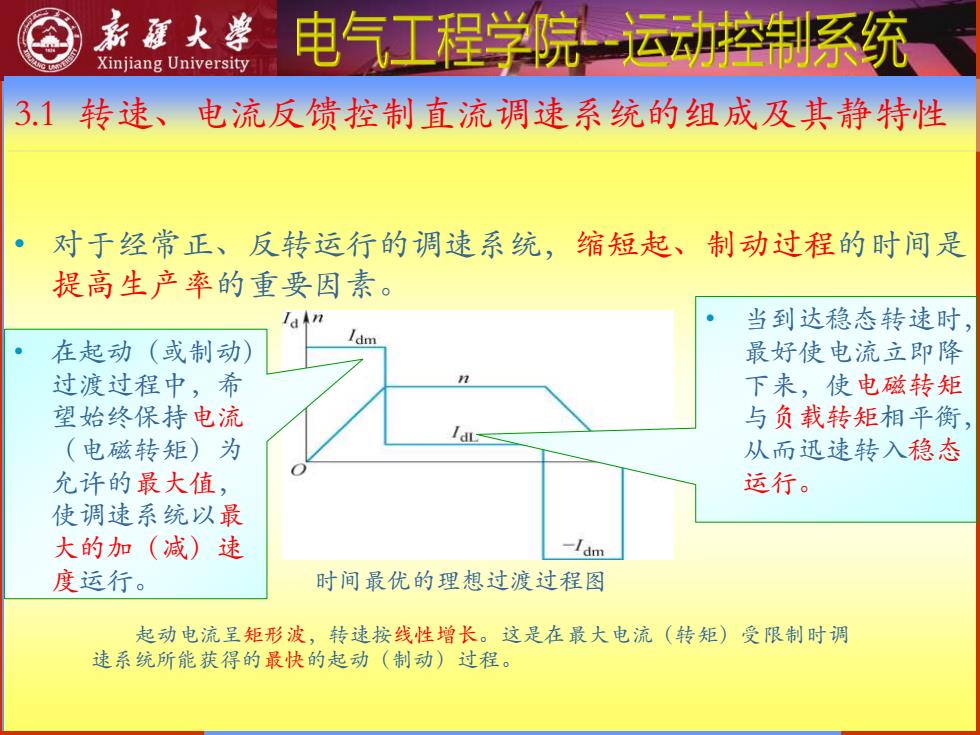
• 对于经常正、反转运行的调速系统,缩短起、制动过程的时间是 提高生产率的重要因素。 3.1 转速、电流反馈控制直流调速系统的组成及其静特性 • 在起动(或制动) 过渡过程中,希 望始终保持电流 (电磁转矩)为 允许的最大值, 使调速系统以最 大的加(减)速 度运行。 • 当到达稳态转速时, 最好使电流立即降 下来,使电磁转矩 与负载转矩相平衡, 从而迅速转入稳态 运行。 时间最优的理想过渡过程图 起动电流呈矩形波,转速按线性增长。这是在最大电流(转矩)受限制时调 速系统所能获得的最快的起动(制动)过程

嘉原火学 Xinjiang University 电气工程学院运动控制系统 3.1.1转速、电流反馈控制直流调速系统的组成 转速调节器ASR的输出限幅电压决定了电流给定的最大值,电流调 节器ACR的输出限幅电压限制了电力电子变换器的最大输出电压 当调节器饱和时,输出达到限幅值,输入量的变化不再影响输出, 除非有反向的输入信号使调节器退出饱和; 当调节器不饱和时,PI调节器工作在线性调节状态,其作用是使输 入偏差电压在稳态时为零。 对于静特性来说,只有转速调节器饱和与不饱和两种情况,电流调 节器不进入饱和状态
3.1.1 转速、电流反馈控制直流调速系统 的组成 • 转速调节器ASR的输出限幅电压决定了电流给定的最大值,电流调 节器ACR的输出限幅电压限制了电力电子变换器的最大输出电压 • 当调节器不饱和时,PI调节器工作在线性调节状态,其作用是使输 入偏差电压在稳态时为零。 • 当调节器饱和时,输出达到限幅值,输入量的变化不再影响输出, 除非有反向的输入信号使调节器退出饱和; • 对于静特性来说,只有转速调节器饱和与不饱和两种情况,电流调 节器不进入饱和状态
系庭大学 Xinjiang University 电气工程学院运动控制系统 3.1.2稳态结构图与参数计算 转速调节器 ASR ACR UPE TG 电流调节器 测速发电 机 转速、电流反馈控制直流调速系统原理图
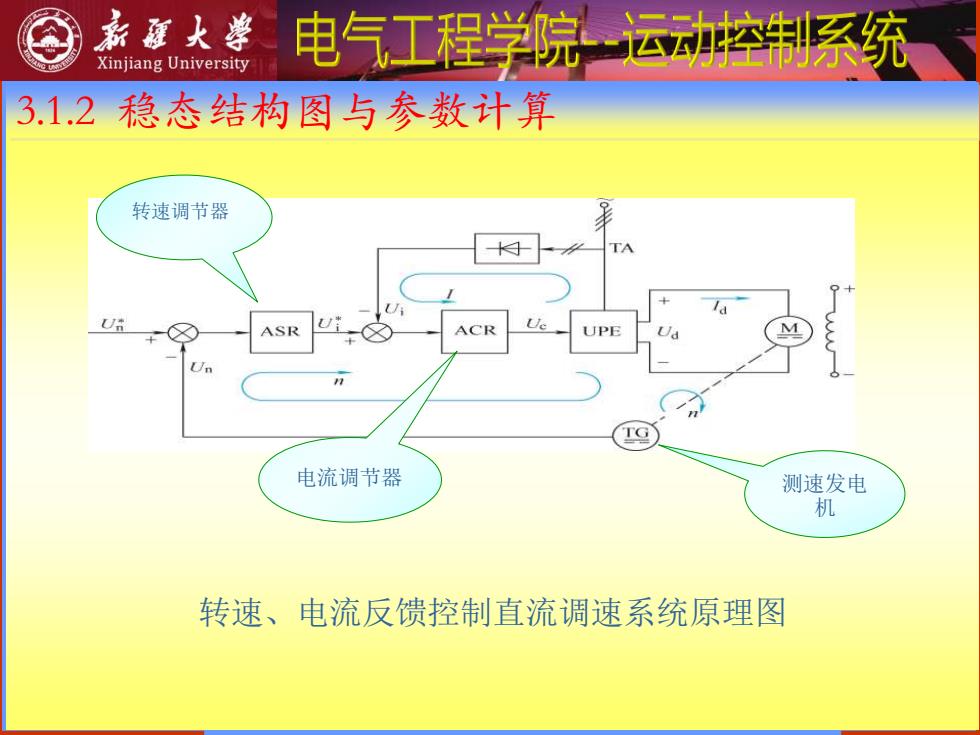
转速、电流反馈控制直流调速系统原理图 3.1.2 稳态结构图与参数计算 转速调节器 测速发电 机 电流调节器