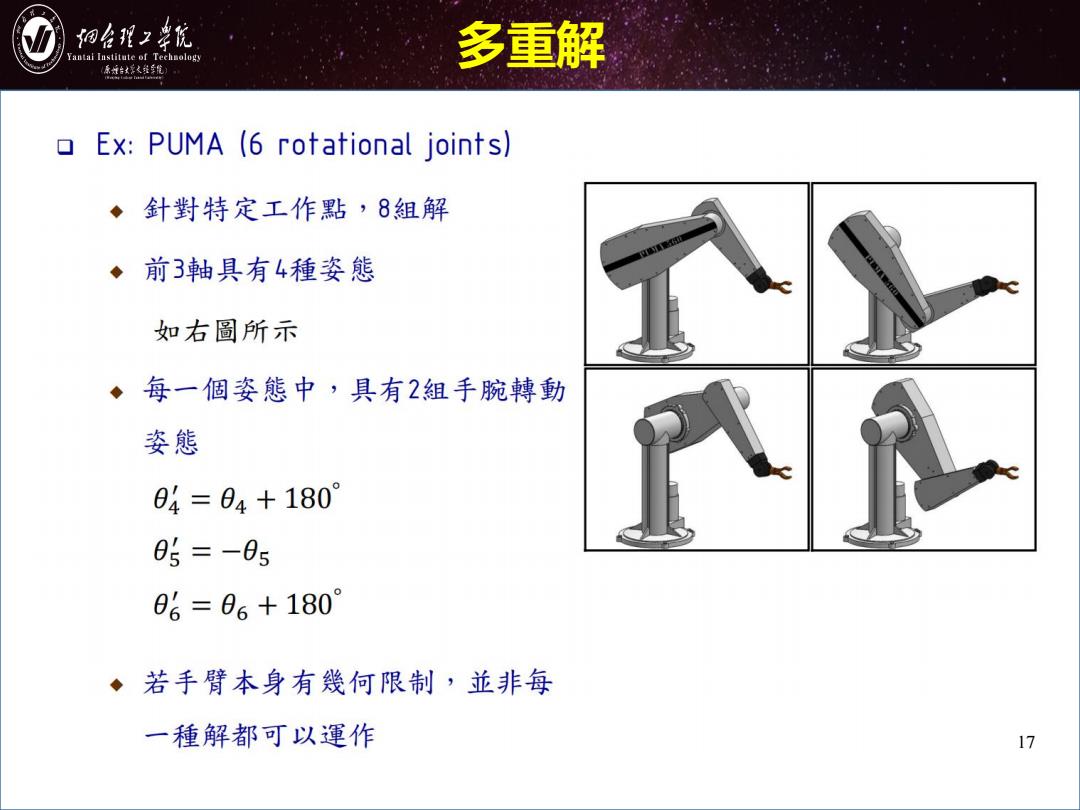
阳台程2幸优 antai Institute of Technology 多重解 原城台好火维年馆 Ex:PUMA (6 rotational joints) ◆針對特定工作點,8組解 ·前3軸具有4種姿態 如右圖所示 ◆每一個姿態中,具有2組手腕轉動 姿態 04=04+180 05=-0s 06=06+180° ·若手臂本身有幾何限制,並非每 一種解都可以運作 17
17 多重解
细台形z幸院 antai Institute of Technology 多重解 原城台好火维年能 口若具有多重解,解的選擇方式 18
18 多重解
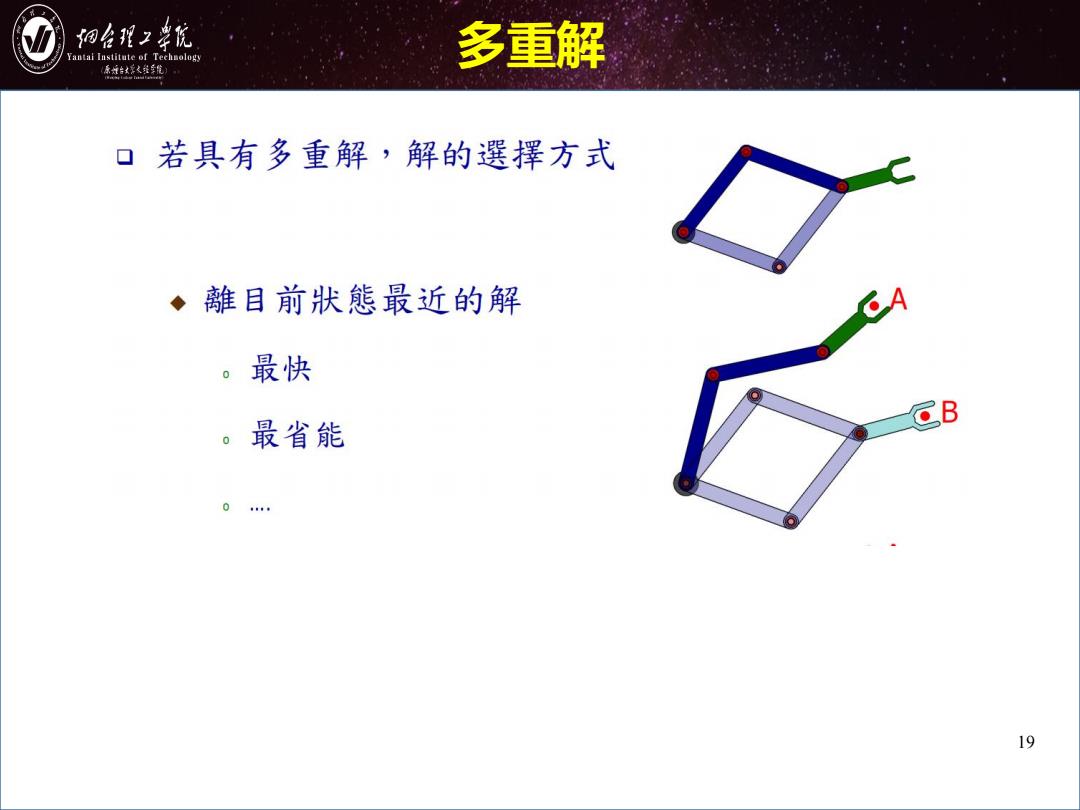
细台形z幸院 antai Institute of Technology 多重解 原城台好火维年院 口若具有多重解,解的選擇方式 ◆離目前狀態最近的解 A 。最快 CB 。最省能 0 19
19 多重解
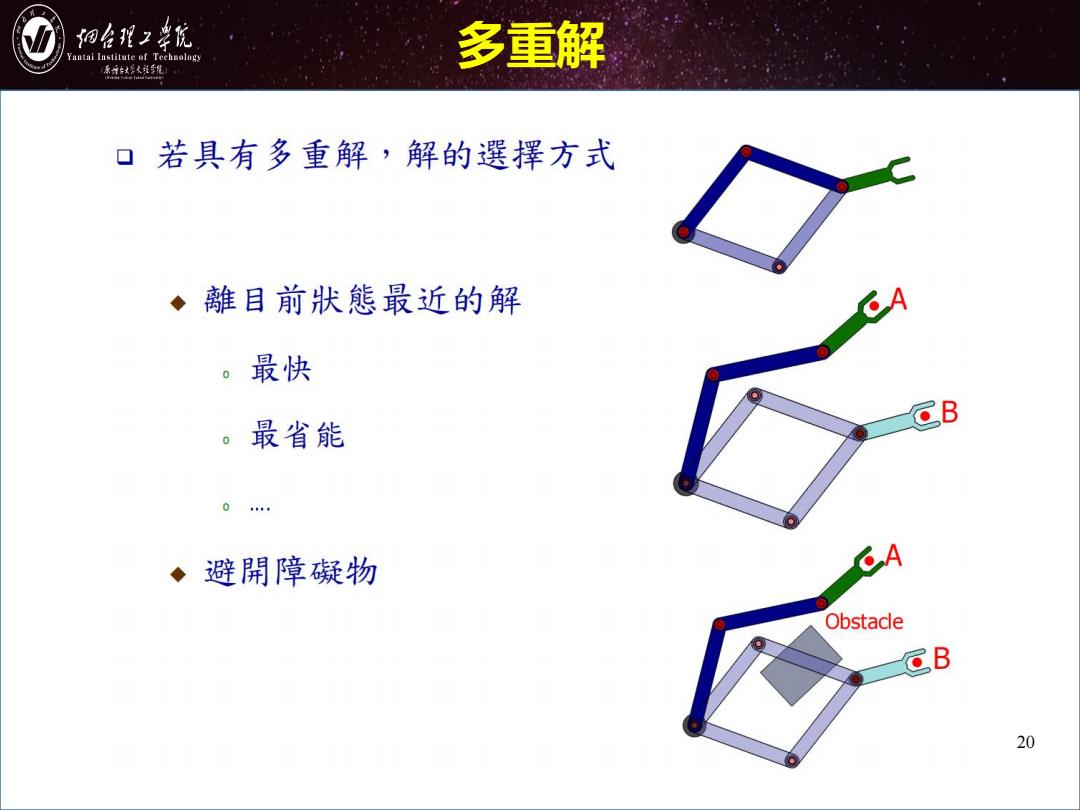
细台形z幸院 antai Institute of Technology 多重解 原城台好火维年航 口若具有多重解,解的選擇方式 ◆離目前狀態最近的解 A 。最快 CB 。最省能 0… ◆避開障礙物 CA Obstacle CB 20
20 多重解

细台形z幸院 antai Institute of Technology 求解方法 原城台好火维年院 ▣解析法Closed-form solutions ◆用代數algebraic或幾何geometric方法 21
21 求解方法