2.可操作性 对于机械手来讲,不用移动单个点,就可以在操作 空间内非常容易地从一点到另一点移动末端执行器, 这一点非常重要。 在设计机械手的机构时,应使其可操作性在作业过程 中的值很大。 中稀大火至 China Agricultural University 2
China Agricultural University 2.可操作性 对于机械手来讲,不用移动单个点,就可以在操作 空间内非常容易地从一点到另一点移动末端执行器, 这一点非常重要。 在设计机械手的机构时,应使其可操作性在作业过程 中的值很大

Yoshikawa将可操作性定义如下: 在一个有n个DOF的机械手中,其末端的位置和方 向的向量,可以用向量q来给出: r=f(q) 这里:=r1,r2,.rnT q=[q1,92,.qnT 上标T表示移项 T添太大 China Agricultural University n个DOF的机械
China Agricultural University Yoshikawa 将可操作性定义如下: 在一个有 n个 DOF的机械手中,其末端的位置和方 向的向量r,可以用向量 q来给出: r=f(q) q1 q2 q3 qn 这里:r=[r1,r2,.rn]T q=[q1,q2,.qn] T 上标 T表示移项 n个 DOF的机械手
对上式进行求导,得关节速度和机械手末端的速度之间 的关系: r-J(q)q 这里, r=dr/dt, q=dq/dt,J(q)=df(q)/dq, J(q)叫做雅可比矩阵。 可操作性w定义为一个标量 w=[detJ(p)JT(q)]12 当机械手没有冗余,小于6个DOF时,可操作性为 w=det J(q) China Agricultural University GINEER
China Agricultural University 对上式进行求导,得关节速度和机械手末端的速度之间 的关系: r=J(q)q 这里, r=dr/dt, q=dq/dt, J(q)=df(q)/dq, J(q) 叫做 雅可比矩阵。 可操作性w定义为一个标量 w=[detJ(p)JT(q)]1/2 当机械手没有冗余,小于6个 DOF时,可操作性为 w=|det J(q)|

以2个DOF机械手为例: 雅可比矩阵为式: J(q)=[11cosq1+12cos(q1+q2) 12c0s(q1+q2)] [-11sing1+12sin(q1+q2)-12sin(q1+q2)] 机械手可操作性大小为: W=l 12sing2l 中稀大水空 China Agricultural University
China Agricultural University 以2个 DOF机械手为例: 雅可比矩阵为式: J(q)= [ l1cosq1+l2cos(q1+q2) l2cos(q1+q2)] [ -l1sinq1+l2sin(q1+q2) -l2sin(q1+q2)] 机械手可操作性大小为: W=l1 l 2 |sinq2 | l1 l2 q1 q2 A B O x y
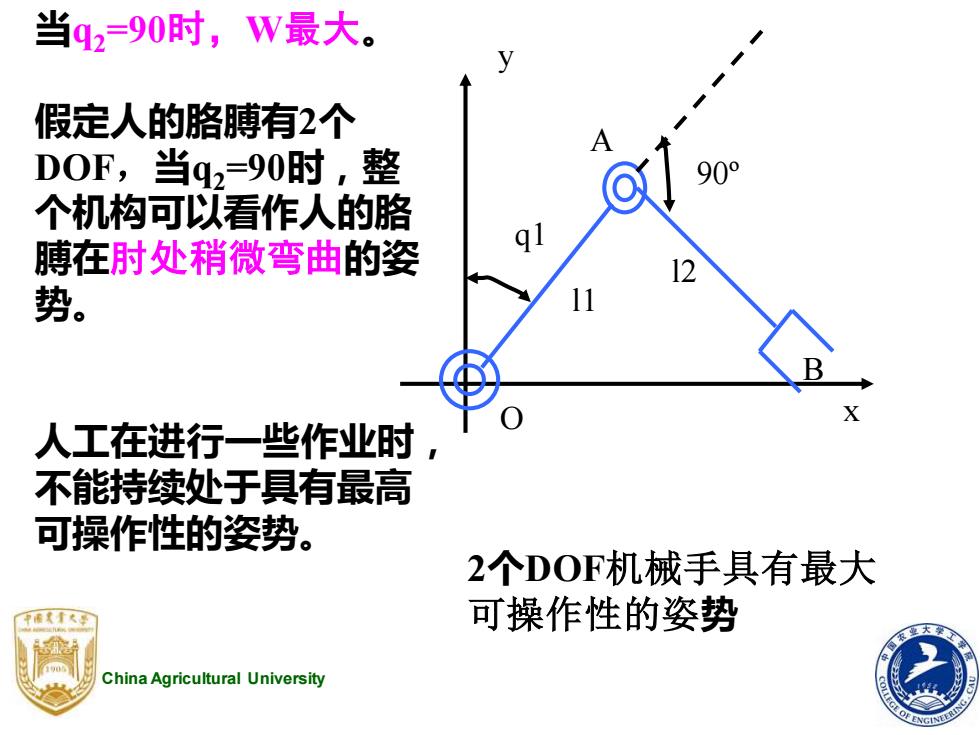
当q2=90时,W最大。 假定人的胳膊有2个 D0F,当q2=90时,整 90° 个机构可以看作人的胳 膊在肘处稍微弯曲的姿 ql 12 势。 人工在进行一些作业时 不能持续处于具有最高 可操作性的姿势。 2个DOF机械手具有最大 可操作性的姿势 China Agricultural University
China Agricultural University 当q2=90时,W最大。 假定人的胳膊有2个 DOF,当q2=90时,整 个机构可以看作人的胳 膊在肘处稍微弯曲的姿 势。 人工在进行一些作业时, 不能持续处于具有最高 可操作性的姿势。 2个DOF机械手具有最大 可操作性的姿势 l1 l2 q1 90º A B O x y