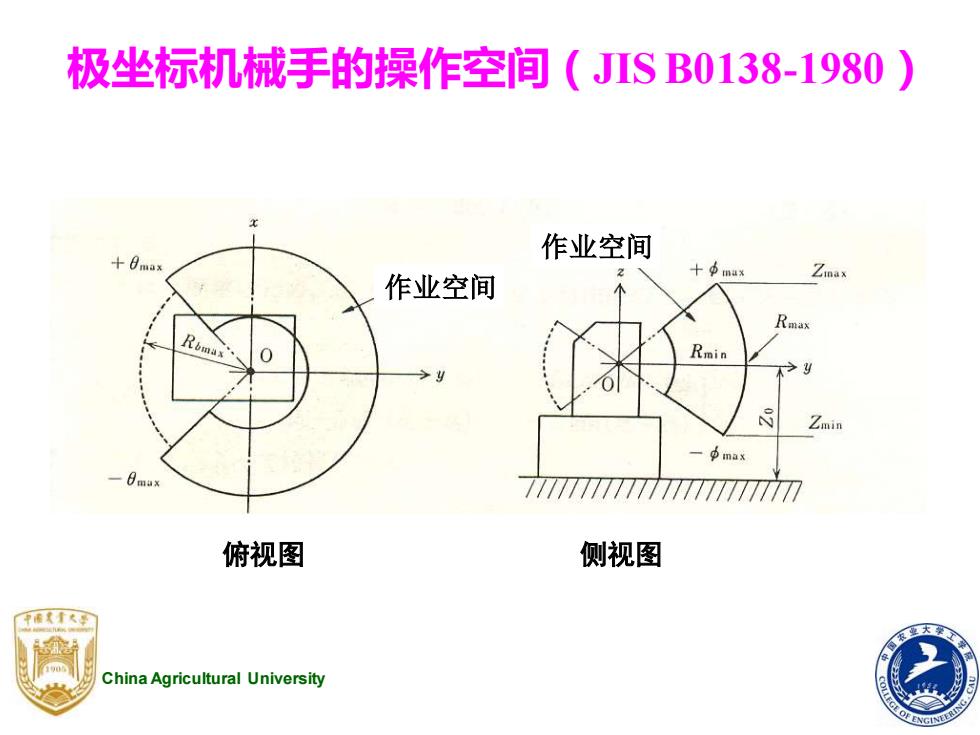
极坐标机械手的操作空间(JISB0138-1980) 作业空间 +0max 3 十中m Zmax 作业空间 Rmax 0 Rmin Zmin ma 一max 777177111117111I111777刀 俯视图 侧视图 稀大十火 China Agricultural University
China Agricultural University 极坐标机械手的操作空间(JIS B0138-1980) 作业空间 作业空间 俯视图 侧视图
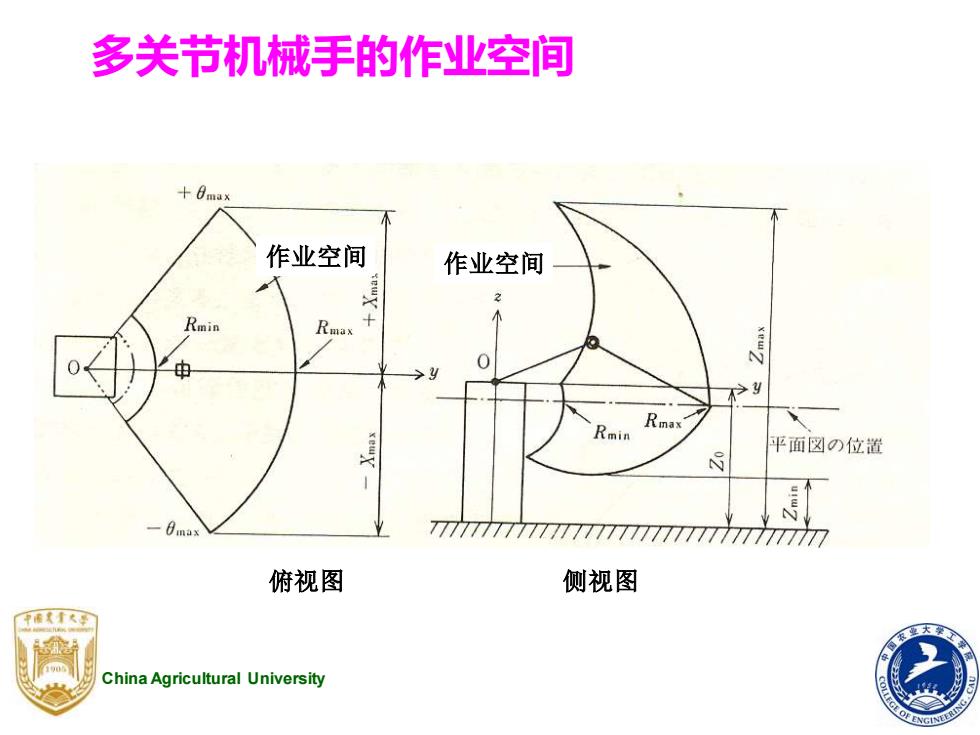
多关节机械手的作业空间 十0mu× 作业空间 作业空间 2 Rmin Rmax 申 Rmin Rmax 平面☒)位道 -0max 7777777777 俯视图 侧视图 T稀大大多 China Agricultural University CE OF EN
China Agricultural University 多关节机械手的作业空间 作业空间 作业空间 俯视图 侧视图
在作业空间图中: 士Xmax为手爪的前后方向最大移动距离 士Yma为手爪的左右方向最大移动距离 ±Zmax为手爪的上下方向最大移动距离 Rmax为手臂伸长到最大位置时原点与手爪前端之间 的距离 Rmin为手臂缩短到最小位置时原点与手爪前端之间 的距离 ±0max为手臂的正负最大左右旋转角度 土 pmax为手臂的最大上下摇摆旋转角度 中带大十大 China Agricultural University
China Agricultural University 在作业空间图中: ± Xmax为手爪的前后方向最大移动距离 ± Ymax为手爪的左右方向最大移动距离 ± Zmax为手爪的上下方向最大移动距离 Rmax为手臂伸长到最大位置时原点与手爪前端之间 的距离 Rmin为手臂缩短到最小位置时原点与手爪前端之间 的距离 ± θmax为手臂的正负最大左右旋转角度 ± φmax为手臂的最大上下摇摆旋转角度
Romax为手臂缩短到最小位置时,手臂后端突出到 机器人后部的最大距离 Z为设置基准面到原点O的高度 B为机械手本体的宽度 L为机械手本体的长度 H为机械手本体的高度 B,与L分别为机械手本体基准面边缘到原点之间 的宽度方向和长度方向上的距离 China Agricultural University
China Agricultural University Rbmax为手臂缩短到最小位置时,手臂后端突出到 机器人后部的最大距离 Z0 为设置基准面到原点O的高度 B为机械手本体的宽度 L为机械手本体的长度 H为机械手本体的高度 B0 与L0分别为机械手本体基准面边缘到原点之间 的宽度方向和长度方向上的距离
多关节机械手和极坐标机械手的正规化体积指标 V要比直角坐标机械手、圆柱坐标机械手和SCARA机 械手的要大。 由于机械手所达到的范围可能会戏剧化地发生变 化,在计算作业空间时,要集中考虑机器人是否有输 送装置、移动平台。 甲带大水华 业大 China Agricultural University
China Agricultural University 多关节机械手和极坐标机械手的正规化体积指标 Vn要比直角坐标机械手、圆柱坐标机械手和SCARA机 械手的要大。 由于机械手所达到的范围可能会戏剧化地发生变 化,在计算作业空间时,要集中考虑机器人是否有输 送装置、移动平台