此外,在所有机械手胳膊长度一定的情况下,当1,等 于1,时,可操作性的值达到最大。 我们的上臂和前臂长度几乎相同,这就是其具有较高 可操作性的原理。 将杆长比设为定值,并将手爪放在x轴上,各种自由 度的机械手的可操作度达到最大值时,它们的角度分 别为: 自由度 q1 q2 q3 94 2 45° 90° 3 35 55 550 中藤大水至 4 33 27° 60° 27 China Agricultural University
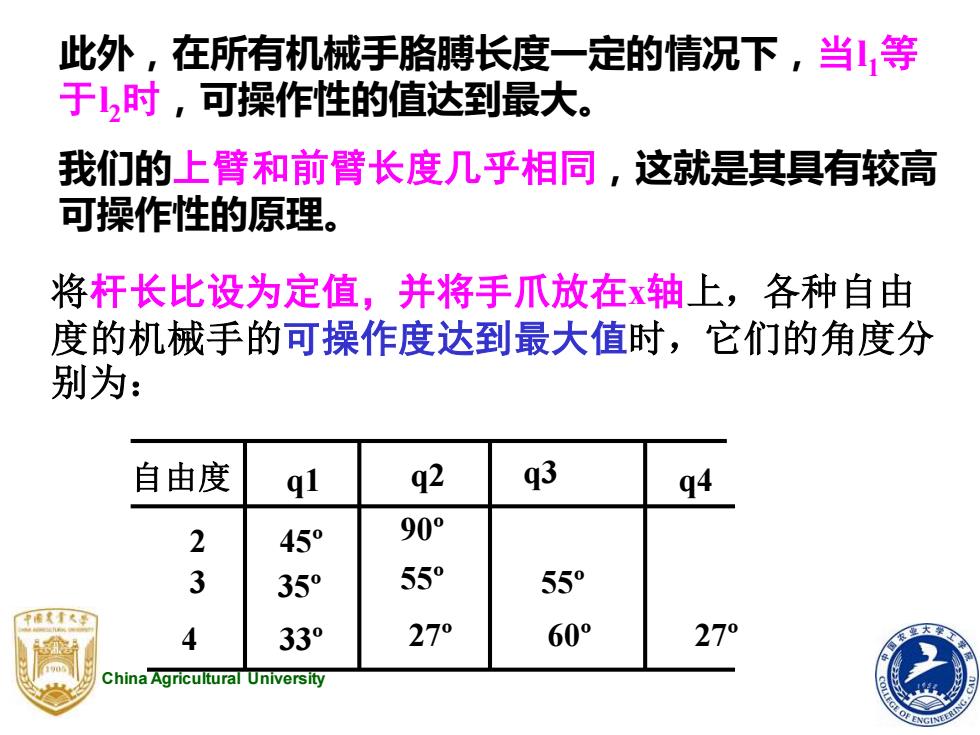
China Agricultural University 此外,在所有机械手胳膊长度一定的情况下,当l 1等 于l 2时,可操作性的值达到最大。 我们的上臂和前臂长度几乎相同,这就是其具有较高 可操作性的原理。 将杆长比设为定值,并将手爪放在x轴上,各种自由 度的机械手的可操作度达到最大值时,它们的角度分 别为: 自由度 2 3 4 q1 q2 q3 q4 45º 90º 35º 55º 55º 33º 27º 60º 27º
55 55 35° 1布式大 金DQ机械手具有最大可操作性的姿势
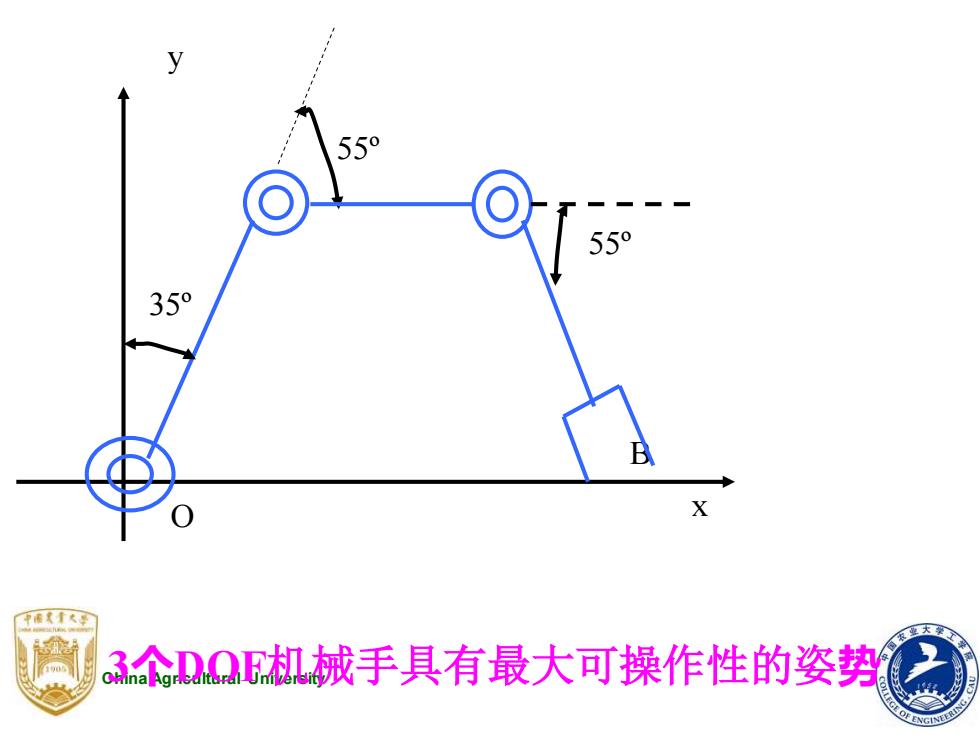
China Agricultural University 3个DOF机械手具有最大可操作性的姿势 35º 55º B O x y 55º
330 B 4个DOF机械手具有最大可操作性的姿势 China Agricultural University
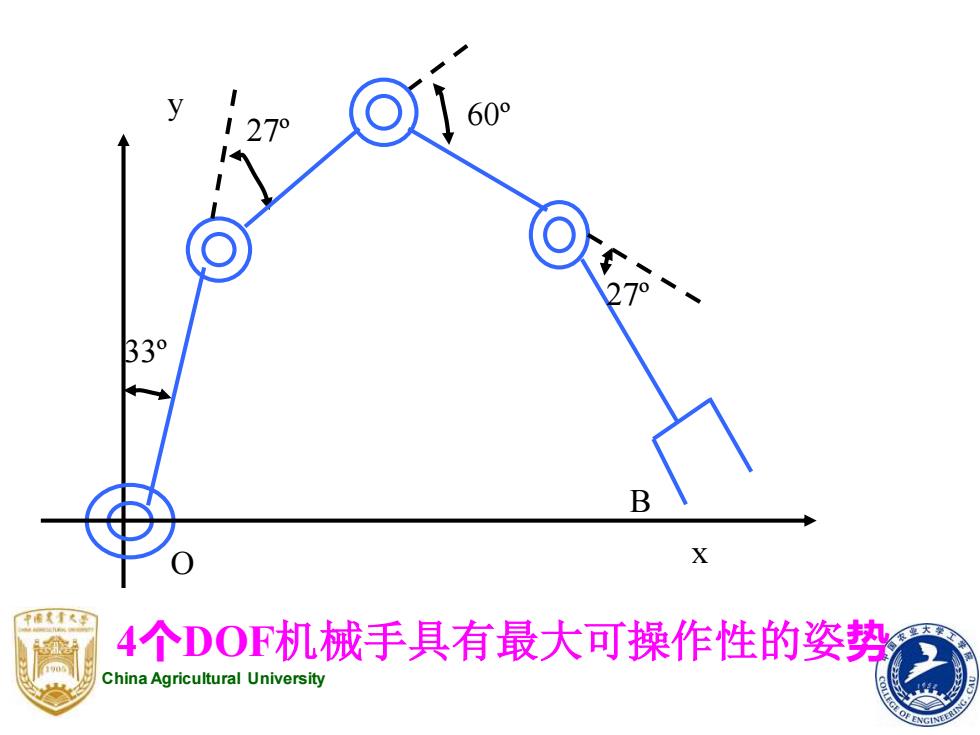
China Agricultural University 4个DOF机械手具有最大可操作性的姿势 33º 27º B O x y 27º 60º
可以看出,在可操作性具有最大值时的任何情况下, 机械手从起点到末端的长度约占整个长度的70%。 当控制机械手,使它处于较高可操作性的姿势时, 就会得到高的工作效率。 中稀大大多 China Agricultural University 岁
China Agricultural University 可以看出,在可操作性具有最大值时的任何情况下, 机械手从起点到末端的长度约占整个长度的70%。 当控制机械手,使它处于较高可操作性的姿势时, 就会得到高的工作效率
3.冗余空间和姿势的多样度(Redundant Space and posture diversity) 即使机械手的基点和末端是固定的,冗余机械手 在这期间也是可以移动到各种预定的位置。 该位置所构成的领域叫做冗余空间。 将手爪可能接近工作对象的方向用角度表示就被定义 为姿势的多样度。 中藤大水 China Agricultural University
China Agricultural University 3.冗余空间和姿势的多样度(Redundant Space and posture diversity) 即使机械手的基点和末端是固定的,冗余机械手 在这期间也是可以移动到各种预定的位置。 该位置所构成的领域叫做冗余空间。 将手爪可能接近工作对象的方向用角度表示就被定义 为姿势的多样度