
当机械手有很多DOF时,也有一些缺点: (1)由于需要大量的转动器,导致机械手质 量很大。 (2)控制机械手也变得缓慢 对于机械手来讲,重要一点是根据工作对象和作 业,考虑适合的机构(包括DOF个数、关节类 型和关节长度)。 China Agricultural University
China Agricultural University 当机械手有很多 DOF时,也有一些缺点: (1)由于需要大量的转动器,导致机械手质 量很大。 (2)控制机械手也变得缓慢 对于机械手来讲,重要一点是根据工作对象和作 业,考虑适合的机构(包括 DOF个数、关节类 型和关节长度)
二、机械手机构的评价 生物生产中,有很多个作业要由人来完成,每项 作业,依据其工作对象的特性、植物栽培系统、 季节和其它条件,有特殊的内容、范围和速度。 有各种机构的机械手,当人工作业要用机器人来代 替时,要采用动力指标、动态指标、控制方法等 进行评价,确定最合适的机构。 这里主要介绍用于生物生产机械手的基本机 构的几个重要指标。 中带大十水 China Agricultural University
China Agricultural University 二、机械手机构的评价 生物生产中,有很多个作业要由人来完成,每项 作业,依据其工作对象的特性、植物栽培系统、 季节和其它条件,有特殊的内容、范围和速度。 有各种机构的机械手,当人工作业要用机器人来代 替时,要采用动力指标、动态指标、控制方法等 进行评价,确定最合适的机构。 这里主要介绍用于生物生产机械手的基本机 构的几个重要指标
1.作业空间(0 perational Space) 作业空间是最重要的指标之一。 原因:如果作业对象不包括在这个空间内,机器人 就够不着它。 作业空间随关节长度的增加而增加。 使用正规化体积指标(Normal ized volume index) Vn来表示: V表示机械手的实际作业空间与理论作业空间(以所 有关节长度之和为半径的球的体积)的比值。 Vn=V/(4πL3/3) 1而式有大正 式甲:是作业空间的体积,L是关节长度之和
China Agricultural University 1.作业空间(Operational Space) 作业空间是最重要的指标之一。 原因:如果作业对象不包括在这个空间内,机器人 就够不着它。 作业空间随关节长度的增加而增加。 使用正规化体积指标(Normalized volume index) Vn来表示: Vn表示机械手的实际作业空间与理论作业空间(以所 有关节长度之和为半径的球的体积)的比值。 Vn=V/(4π L3/3) 式中:V是作业空间的体积, L是关节长度之和
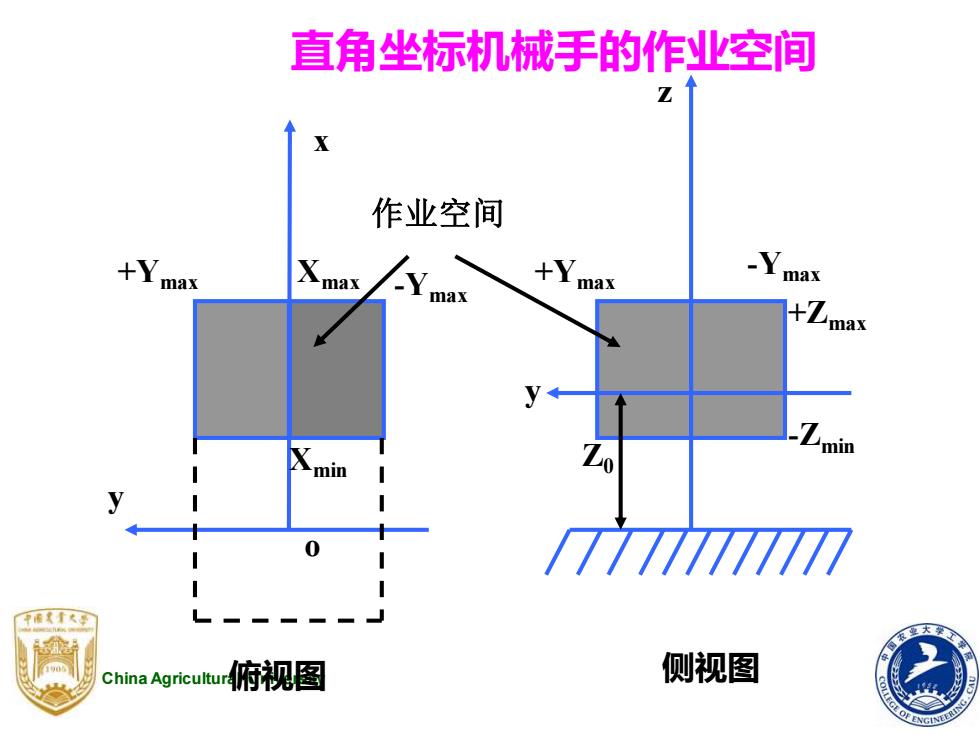
直角坐标机械手的作业空间 X 作业空间 +Y max max 十Yma Ymax max Zmax 0 稀大水孕 L China Agricultur俯视图 侧视图
China Agricultural University z +Ymax x y Xmax -Ymax Xmin o y +Ymax -Ymax +Zmax -Zmin Z0 作业空间 俯视图 侧视图 直角坐标机械手的作业空间
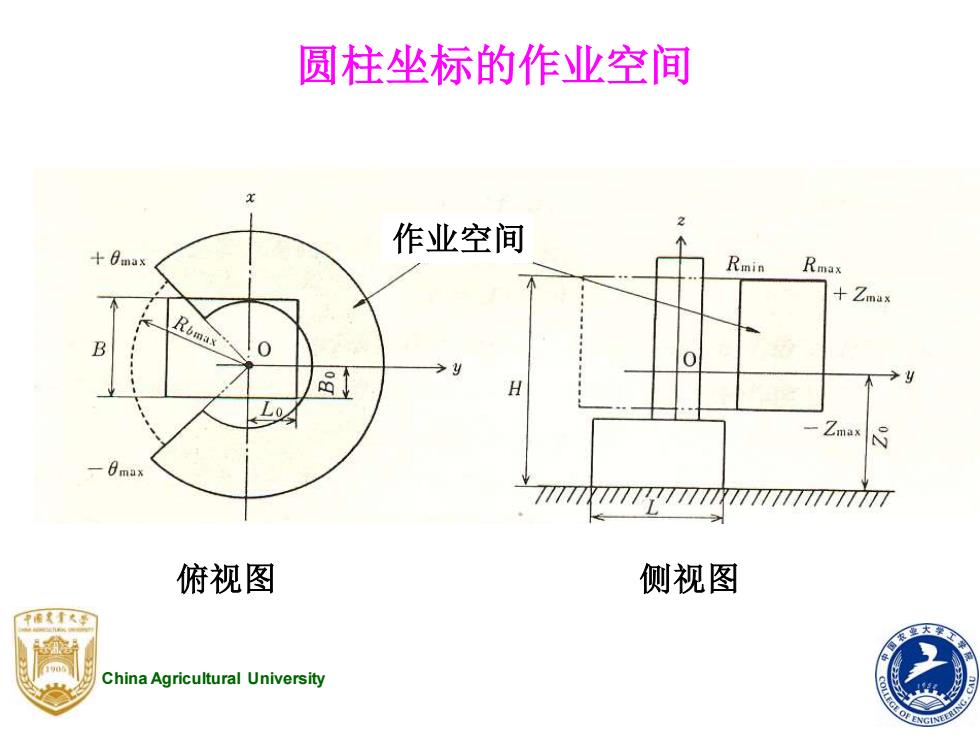
圆柱坐标的作业空间 作业空间 Rmin Rmax 十Zma× 0 Zma max 俯视图 侧视图 T稀大大多 China Agricultural University GE OF EN
China Agricultural University 作业空间 俯视图 侧视图 圆柱坐标的作业空间