4.多关节机械手(articulated manipulator) 多关节机械手主要由旋转和摇摆两自由度构成,与 前三种相比,更接近人的胳膊,也称为“拟人机械手 ”,它的关节也用人的关节命名-肩(shoulder)、肘 (elbow)、腕(vrist)和相应的关节。 中带大十火孕 Chinaltural University
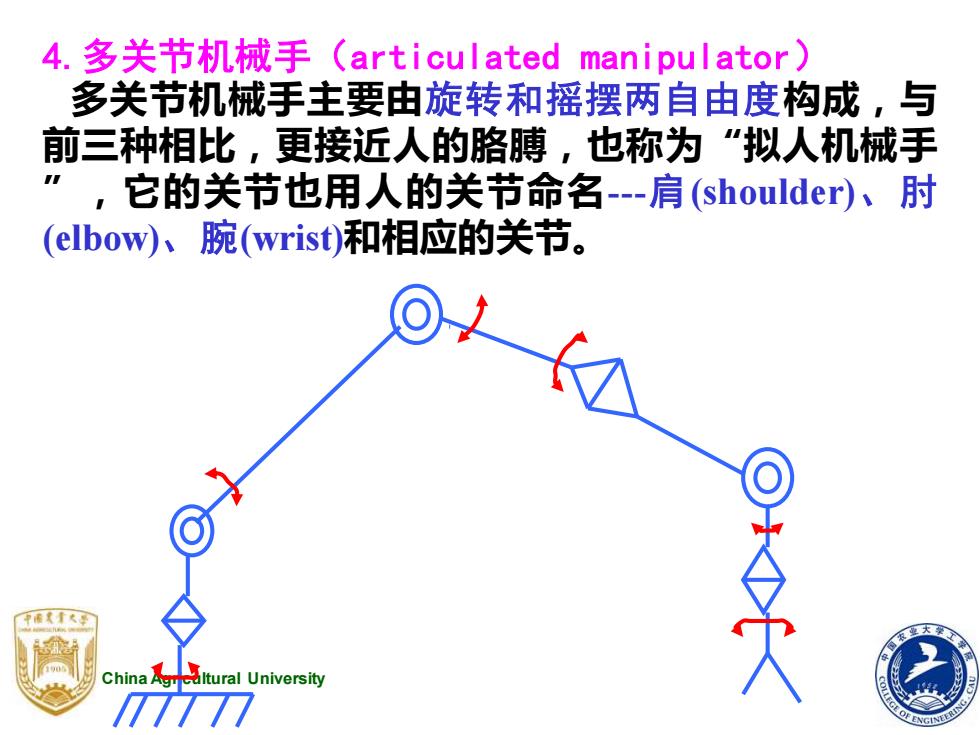
China Agricultural University 4.多关节机械手(articulated manipulator) 多关节机械手主要由旋转和摇摆两自由度构成,与 前三种相比,更接近人的胳膊,也称为“拟人机械手 ” ,它的关节也用人的关节命名-肩(shoulder)、肘 (elbow)、腕(wrist)和相应的关节
它也叫做 旋转坐标机械手(revolute-coordinate manipulator) 关节胳膊机器人(jointed-arm robot). 优点:机械手在三维空间内运动灵活,移动速度 快,作业空间也比前三个机械手大。 缺点:坐标计算和控制较复杂,定位精度不高。 此外,由于它有许多旋转关节,不易处理较重的 工作对象。 China Agricultural University
China Agricultural University 它也叫做 旋转坐标机械手(revolute-coordinate manipulator) 关节胳膊机器人(jointed-arm robot)。 优点:机械手在三维空间内运动灵活,移动速度 快,作业空间也比前三个机械手大。 缺点:坐标计算和控制较复杂,定位精度不高。 此外,由于它有许多旋转关节,不易处理较重的 工作对象
1981年,日本Yamanashi大学的X.Makino研制成功 Selective Compliance Assembly Robot Arm (SCARA)机器人。 它的机械手也划归为多关 节机械手,它拥有多关节 和圆柱机械手两个方面的 特性。 这个机械手适合在水平盘 上作业,如秧苗处理和塞 子苗的灌溉。 tural University
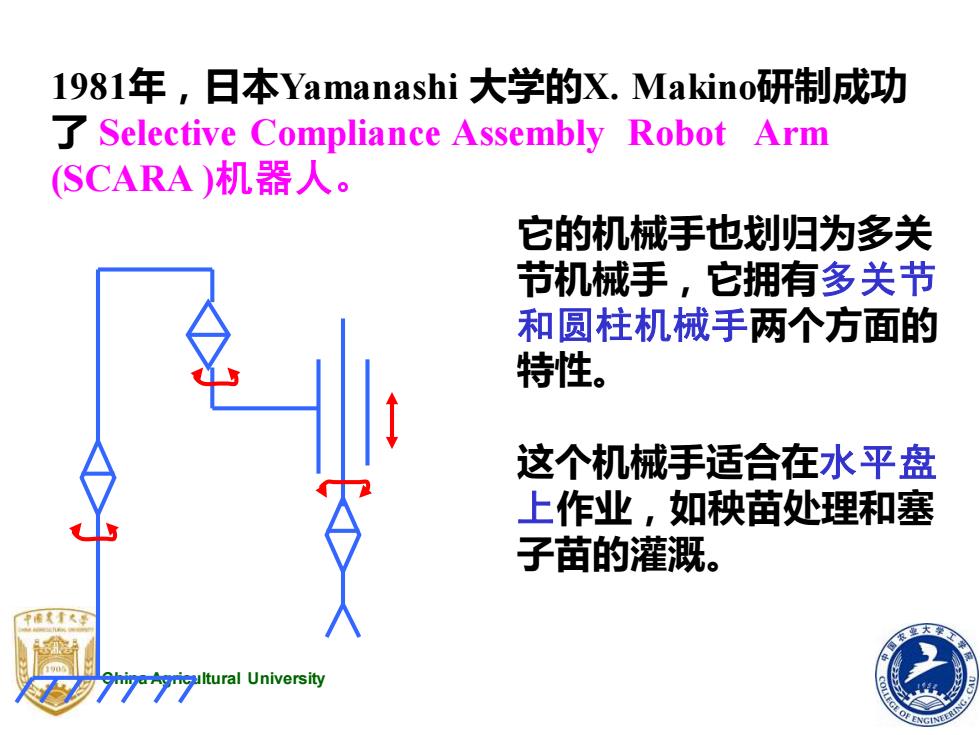
China Agricultural University 1981年,日本Yamanashi 大学的X. Makino研制成功 了 Selective Compliance Assembly Robot Arm (SCARA )机器人。 它的机械手也划归为多关 节机械手,它拥有多关节 和圆柱机械手两个方面的 特性。 这个机械手适合在水平盘 上作业,如秧苗处理和塞 子苗的灌溉
5.冗余机械手 6个DOF的机械手足以将末端执行器移动到任何 位置,并可以在作业空间内有任何姿势。 当作业对象是两边对称,并可以沿轴的任何方向 接近时(像大多数果实),5个D0F就足够了。 机械手的DOF越多,其灵活性以及避免碰创和它的 能力就越大。此外,通过更换末端执行器,机械手可 以完成多种作业。基于这个优势,研制了冗余机械手 China Agricultural University
China Agricultural University 5. 冗余机械手 6 个DOF的机械手足以将末端执行器移动到任何 位置,并可以在作业空间内有任何姿势。 当作业对象是两边对称,并可以沿轴的任何方向 接近时(像大多数果实),5个 DOF就足够了。 机械手的 DOF越多,其灵活性以及避免碰创和它的 能力就越大。此外,通过更换末端执行器,机械手可 以完成多种作业。基于这个优势,研制了冗余机械手
冗余机械手的定义为“DOF超过7个的机械手”。 人的胳膊有7个DOF,肩膀有3个,肘有1-2个,腕 有2-3个(腕的滚动有时包括在肘的一个自由度内), 如图: 中带大十大 肩 时 腕 China Agricultural University
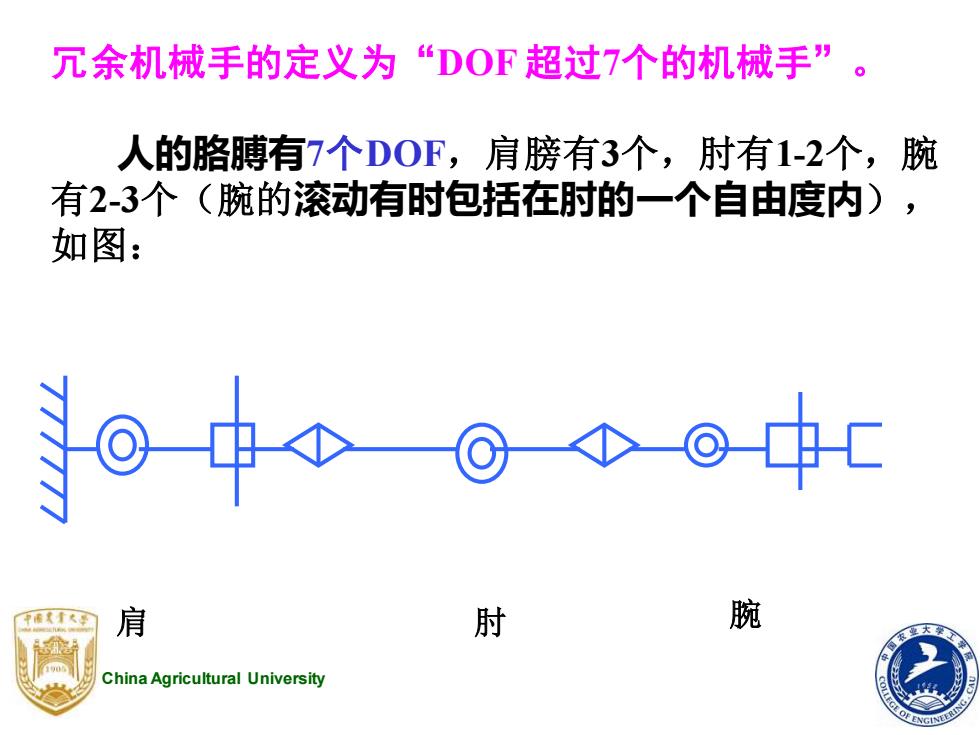
China Agricultural University 冗余机械手的定义为“DOF 超过7个的机械手”。 人的胳膊有7个DOF,肩膀有3个,肘有1-2个,腕 有2-3个(腕的滚动有时包括在肘的一个自由度内), 如图: 肩 肘 腕