机械手的作业空间是矩形,也叫做矩形坐标机器人 3个自由度使机械手末端可以在水平和垂直方向运动。 优点:机构和控制都非常简单,可以实现高精度定位 缺点:缺少灵活性,难以扩大其作业空间和进行高速 作业。 该机械手适合于处理苗盘内的秧苗或田垄上的小植物 China Agricultural University
China Agricultural University 机械手的作业空间是矩形,也叫做矩形坐标机器人 3个自由度使机械手末端可以在水平和垂直方向运动。 优点:机构和控制都非常简单,可以实现高精度定位 缺点:缺少灵活性,难以扩大其作业空间和进行高速 作业。 该机械手适合于处理苗盘内的秧苗或田垄上的小植物
2.圆柱坐标机械手(Cyl indrical-Coordinate Manipulator) 将直角坐标机械手的x与y轴关 节用绕轴的旋转关节和水平方 向的直动关节来代替,其自由 China Agricultural University 度为3个
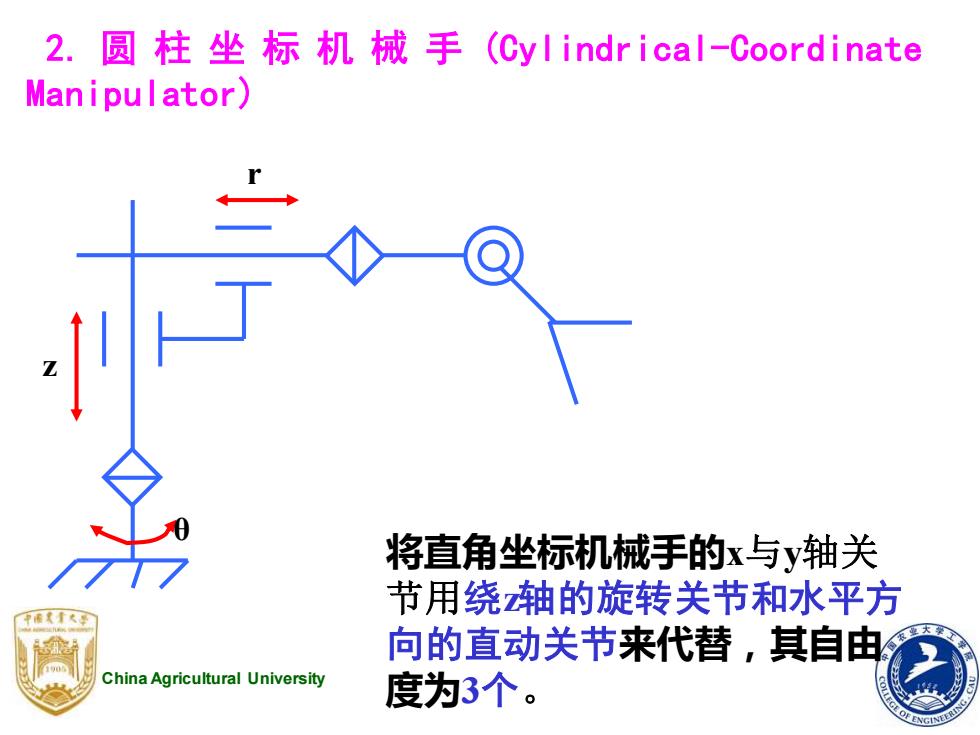
China Agricultural University 2. 圆柱坐标机械手 (Cylindrical-Coordinate Manipulator) θ z r 将直角坐标机械手的x与y轴关 节用绕z轴的旋转关节和水平方 向的直动关节来代替,其自由 度为3个
相对于直角坐标机械手,它的所有关节长度与 机械手相同,圆柱坐标机械手有较大的操作空间。 它总是沿平行于机器人的基点的方向运动。 坐标由 r(手臂的伸缩长度) 日(手臂在水平面内的旋转角度) z(垂直高度) 来计算。 China Agricultural University
China Agricultural University 相对于直角坐标机械手,它的所有关节长度与 机械手相同,圆柱坐标机械手有较大的操作空间。 它总是沿平行于机器人的基点的方向运动。 坐标由 r(手臂的伸缩长度) θ(手臂在水平面内的旋转角度) z(垂直高度) 来计算
3.极坐标机械手 (Polar coordinate manipulator) 当圆柱机械手中的直动自由度“z”被换成旋转DOF “Φ”时,它就变成了极坐标机械手。 机械手由两个旋转DOF和一个直动 777 DOF来确定位置。它的作业空间是球 China Agricultural Univ形的,因此也叫做球坐标机械手
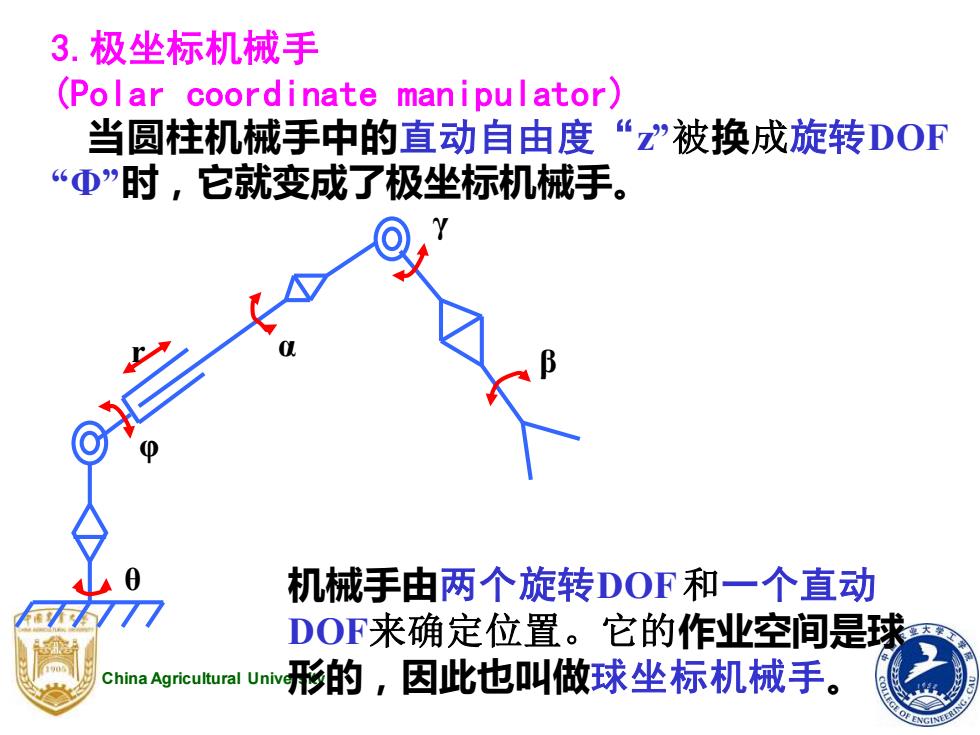
China Agricultural University 3.极坐标机械手 (Polar coordinate manipulator) 当圆柱机械手中的直动自由度“z”被换成旋转DOF “Φ”时,它就变成了极坐标机械手。 γ θ β α φ r 机械手由两个旋转DOF和一个直动 DOF来确定位置。它的作业空间是球 形的,因此也叫做球坐标机械手

在关节长度相同时,它的作业空间比上述两种都大。 如果这个机械手的直动关节采用气缸,就可以自由 伸缩,并可以压缩到一定长度,这样就可以在狭窄 的空间内工作。 稀水经 China Agricultural University
China Agricultural University 在关节长度相同时,它的作业空间比上述两种都大。 如果这个机械手的直动关节采用气缸,就可以自由 伸缩,并可以压缩到一定长度,这样就可以在狭窄 的空间内工作