一、机械手的机构 日本工业标准(JISB0134-1986)将机械手定义为: A manipulator is defined as a devices that has a function similar to that of a human hand and can move a work object in three dimensions. 具有类似人类手的功能,使工作对象能在三维空间内 移动的机构。 它应具有以下特性: (1)灵活性: (2) 可操纵性: c3以c可避免障碍物性
China Agricultural University 一、机械手的机构 日本工业标准(JIS B0134-1986)将机械手定义为: A manipulator is defined as a devices that has a function similar to that of a human hand and can move a work object in three dimensions. 具有类似人类手的功能,使工作对象能在三维空间内 移动的机构。 它应具有以下特性: (1)灵活性: (2)可操纵性: (3)可避免障碍物性
机械手包括关节和杆件。 每个关节有1个或多个的自由度(DOR,degree of freedom).。 自由度是衡量机械手运动柔性的尺度,它表示机械 手所具有的能够独立运动的数量。 一般来说,机械手需要6个自由度,可以将末端执 行器移到三维空间内合适的位置,并可以处于良好 的姿势。 机械手的自由度越多,灵活性越好。同时重量也增 加,机构也越复杂,控制也越难。 China Agricultural University
China Agricultural University 机械手包括关节和杆件。 每个关节有1个或多个的自由度(DOF, degree of freedom)。 自由度是衡量机械手运动柔性的尺度,它表示机械 手所具有的能够独立运动的数量。 一般来说,机械手需要6个自由度,可以将末端执 行器移到三维空间内合适的位置,并可以处于良好 的姿势。 机械手的自由度越多,灵活性越好。同时重量也增 加,机构也越复杂,控制也越难
机械手关节包括旋转型与直动型: 直动关节有两种符号表示,旋转关节有三种不同符号。 直动型关节 旋转型关节 关范的运动机能符号(JISB0138-1980)
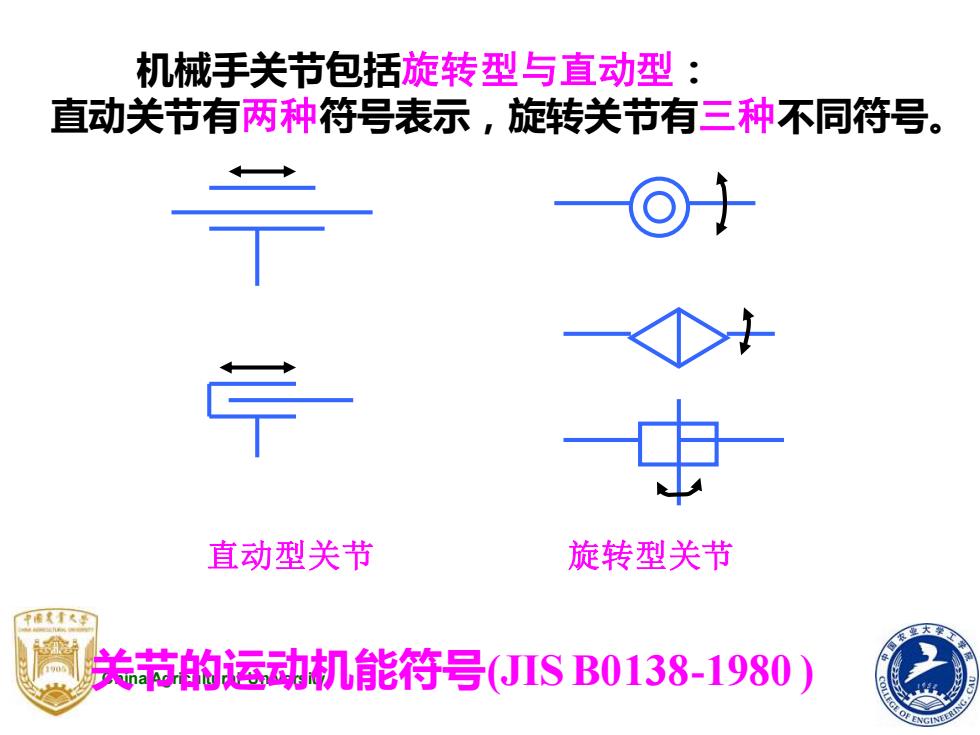
China Agricultural University 机械手关节包括旋转型与直动型: 直动关节有两种符号表示,旋转关节有三种不同符号。 关节的运动机能符号(JIS B0138-1980 ) 直动型关节 旋转型关节
机械手的机构可以由自由度数量、关节类型、杆长及 偏移值组成 基本结构 要设计一个机械手,不仅要考虑基本结构,而且也 应考虑其内部机构。 内部机构包括手臂的粗细和形状、电机的安装位置和 类型、传动装置的种类(链条、皮带、齿轮等)、减 速器与减速比、执行元件的种类(电动、液动、气 动)、制动装置、重心平衡等。 这里主要介绍机械手的典型机构。 China Agricultural University
China Agricultural University 机械手的机构可以由自由度数量、关节类型、杆长及 偏移值组成———基本结构 要设计一个机械手,不仅要考虑基本结构,而且也 应考虑其内部机构。 内部机构包括手臂的粗细和形状、电机的安装位置和 类型、传动装置的种类(链条、皮带、齿轮等)、减 速器与减速比、执行元件的种类(电动、液动、气 动)、制动装置、重心平衡等。 这里主要介绍机械手的典型机构
1.直角坐标机械手 3条相互正交的轴(3 个直动关节),来确 (Cartesian coordinate manipulator) 定末端执行器的三维 位置 历 5个自由度中 的2个是旋转 点,主要确定 末端执行器的 姿势 中带大十水孕 China 真角坐标机械手(JISB0138-1980 GINEER
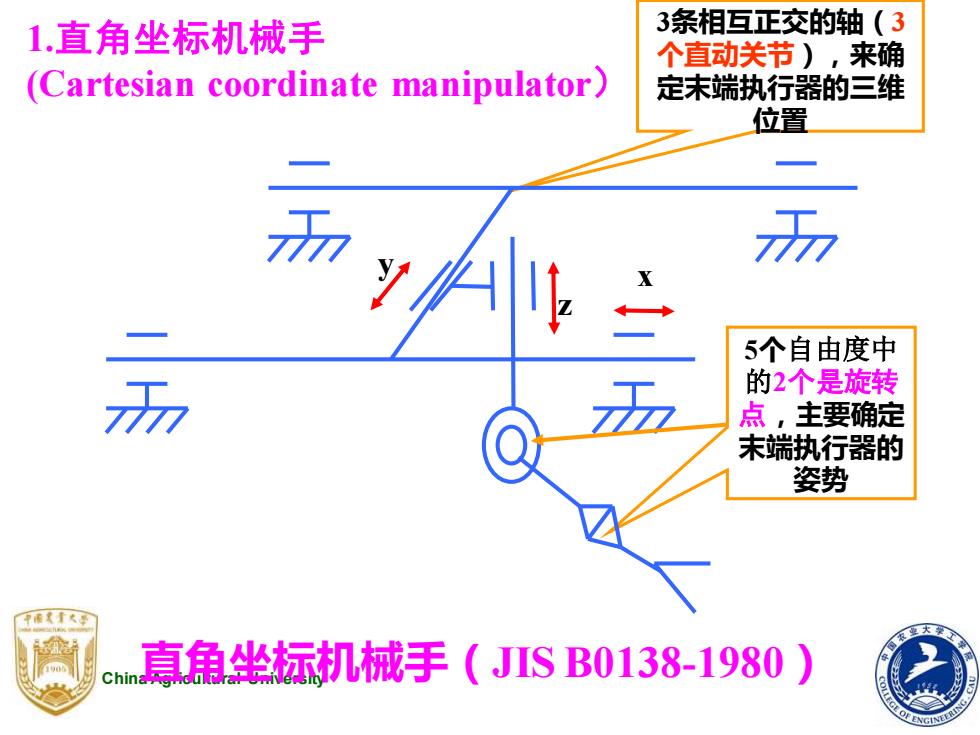
China Agricultural University 1.直角坐标机械手 (Cartesian coordinate manipulator) 直角坐标机械手(JIS B0138-1980) 3条相互正交的轴(3 个直动关节),来确 定末端执行器的三维 位置 5个自由度中 的2个是旋转 点,主要确定 末端执行器的 姿势 x y z