4.1.2插补方法的分类 1.基准脉冲插补(行程标量插补或脉冲增量插补) 特点:每次插补结束,数控装置向每个运动坐标输出基准 脉冲序列,每个脉冲代表了最小位移,脉冲序列的频率代 表了坐标运动速度,而脉冲的数量表示移动量。 ·仅适用于一些中等精度或中等速度要求的计算机数控系统
4.1.2 插补方法的分类 1.基准脉冲插补(行程标量插补或脉冲增量插补) • 特点:每次插补结束,数控装置向每个运动坐标输出基准 脉冲序列,每个脉冲代表了最小位移,脉冲序列的频率代 表了坐标运动速度,而脉冲的数量表示移动量。 • 仅适用于一些中等精度或中等速度要求的计算机数控系统

主要的脉冲增量插补方法 1.数字脉冲乘法器插补法 2.逐点比较法 3.数字积分法 4. 矢量判别法 5.比较积分法 6.最小偏差法 7.目标点跟踪法 8.单步追踪法 9.直接函数法 10.加密判别和双判别插补法
主要的脉冲增量插补方法 1. 数字脉冲乘法器插补法 2. 逐点比较法 3. 数字积分法 4. 矢量判别法 5. 比较积分法 6. 最小偏差法 7. 目标点跟踪法 8. 单步追踪法 9. 直接函数法 10.加密判别和双判别插补法
。2.数字采样插补(数据增量插补) 特点:数控装置产生的不是单个脉冲,而是标准二进制字。插补 运算分两步完成。 (1)粗插补软件实现) 在给定起点和终点的曲线之间插入若干个点,即用若干条微 小直线段逼近给定曲线,每一微小直线段的长度都相等,且与给 定速度有关。 (2)精插补(硬件实现) 在粗插补算出的每一微小直线段的基础上再作“数据点的密 化”工作,相当于对直线的脉冲增量插补。 适用于闭环、半闭环以直流和交流伺服电机为驱动装置的位 置采样控制系统
2. 数字采样插补(数据增量插补) 特点:数控装置产生的不是单个脉冲,而是标准二进制字。插补 运算分两步完成。 (1)粗插补(软件实现) 在给定起点和终点的曲线之间插入若干个点,即用若干条微 小直线段逼近给定曲线,每一微小直线段的长度都相等,且与给 定速度有关。 (2)精插补(硬件实现) 在粗插补算出的每一微小直线段的基础上再作“数据点的密 化”工作,相当于对直线的脉冲增量插补。 适用于闭环、半闭环以直流和交流伺服电机为驱动装置的位 置采样控制系统
主要的数字增量插补方法 1.直线函数法 2.扩展数字积分法 3.二阶递归扩展数字积分插补法 4.双数字积分插补法 5.角度逼近圆弧插补法 6.“改进吐斯丁”(Improved Tustin Method-ITM)法
主要的数字增量插补方法 1. 直线函数法 2. 扩展数字积分法 3. 二阶递归扩展数字积分插补法 4. 双数字积分插补法 5. 角度逼近圆弧插补法 6. “改进吐斯丁”(Improved Tustin Method-ITM)法
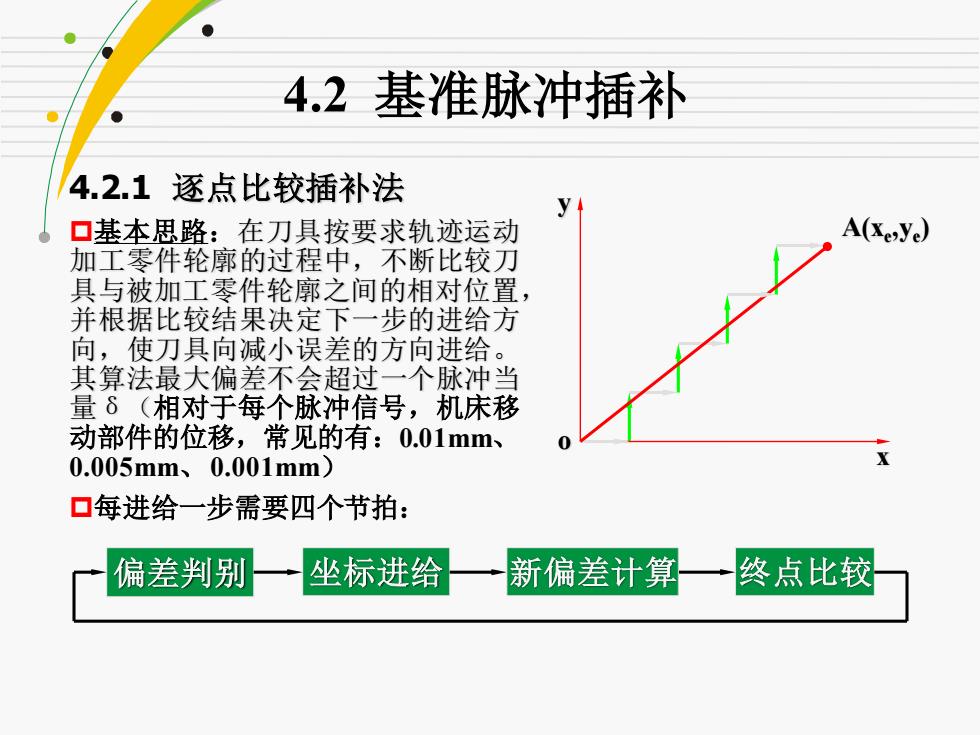
4.2基准脉冲插补 4.2.1逐点比较插补法 y 口基本思路:在刀具按要求轨迹运动 A(Key。) 加工零件轮廓的过程中,不断比较刀 具与被加工零件轮廓之间的相对位置, 并根据比较结果决定下一步的进给方 向,使刀具向减小误差的方向进给。 其算法最大偏差不会超过一个脉冲当 量δ(相对于每个脉冲信号,机床移 动部件的位移,常见的有:0.01mm、 0 0.005mm、0.001mm) 口每进给一步需要四个节拍: 偏差判别 坐标进给 新偏差计算一→: 终点比较
4.2 基准脉冲插补 4.2.1 逐点比较插补法 基本思路:在刀具按要求轨迹运动 加工零件轮廓的过程中,不断比较刀 具与被加工零件轮廓之间的相对位置, 并根据比较结果决定下一步的进给方 向,使刀具向减小误差的方向进给。 其算法最大偏差不会超过一个脉冲当 量δ(相对于每个脉冲信号,机床移 动部件的位移,常见的有:0.01mm、 0.005mm、0.001mm) 每进给一步需要四个节拍: y o x A(xe ,ye ) 偏差判别 坐标进给 新偏差计算 终点比较