3.4典型数控功能原理及实现 插补问题的输出-输出量的接收者与执行者 edecele 000●0 输出指令接收者伺服驱动单元 输出指令执行者-伺服电机 11
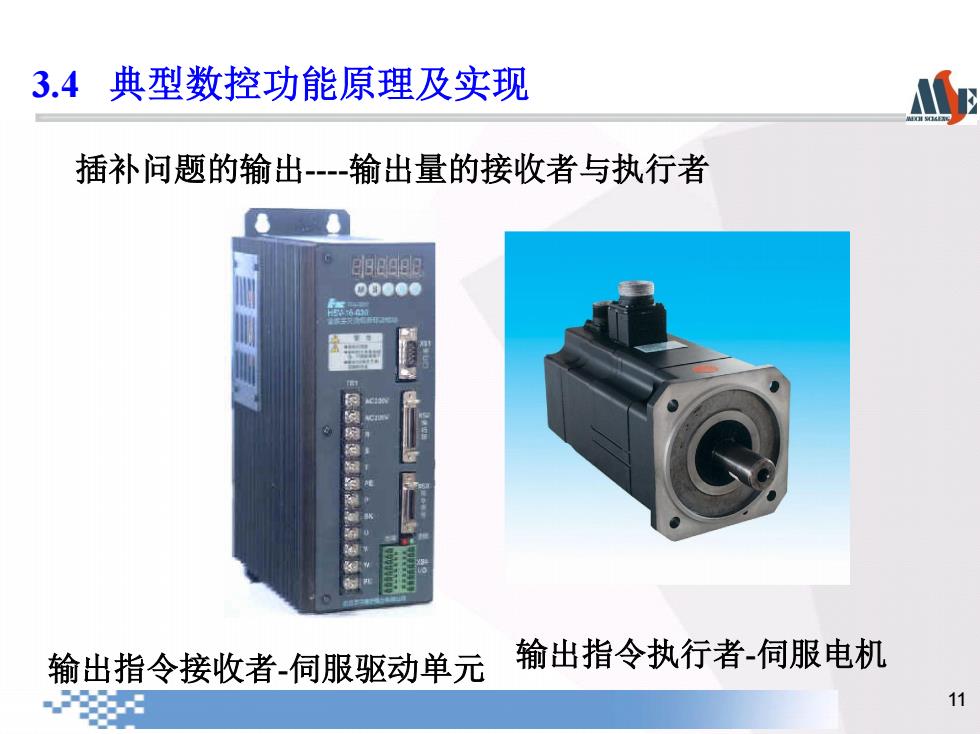
11 插补问题的输出-输出量的接收者与执行者 输出指令接收者-伺服驱动单元 输出指令执行者-伺服电机 3.4 典型数控功能原理及实现
3.4典型数控功能原理及实现 ◆插补问题的输出-隐含限制 ●输出量的形式:脉冲(电压电流) ●运动的最小设定单位具有不可再分性 电机OCo 12
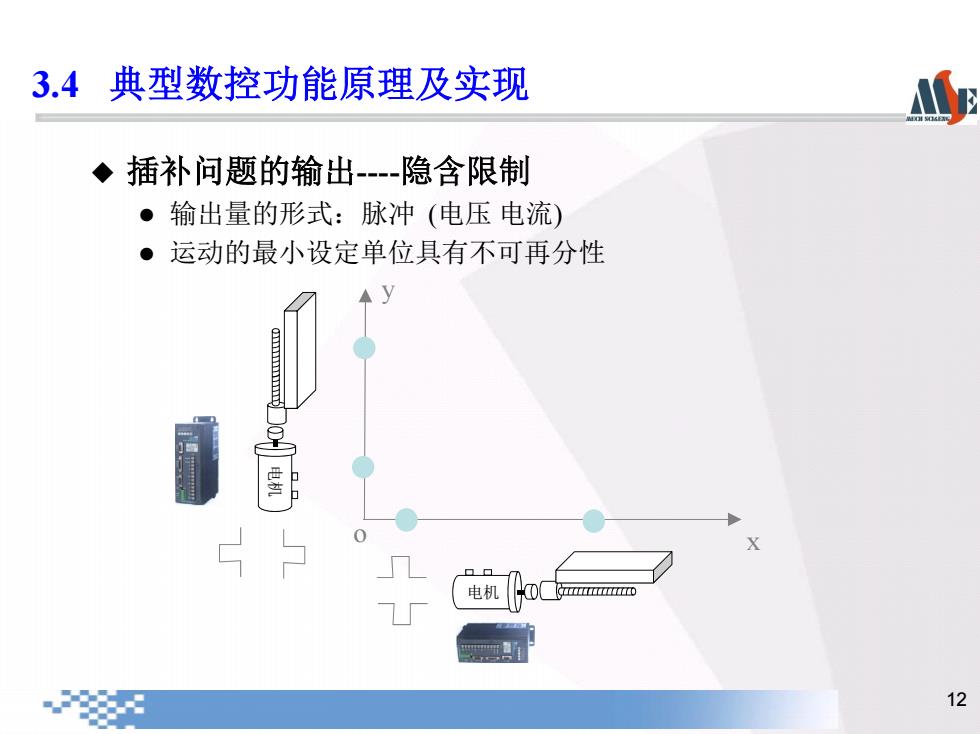
12 插补问题的输出-隐含限制 输出量的形式:脉冲 (电压 电流) 运动的最小设定单位具有不可再分性 电机 电机 x y o 3.4 典型数控功能原理及实现
3.4典型数控功能原理及实现 ◆插补问题描述/定义 ◆已知(输入) ·G代码程序描述零件轮廓或刀位轨迹的直线、圆弧. 、:是、缕套调熟方向一圆汉 ·进给速度 ◆求解(输出) ·进给伺服系统可以接收的指令 ·单位时间内各轴的增量或速度(△x,△y.) ◆隐含的限定条件 ·指令控制的运动方向限制(有限自由度) ● 令控制的运动部件的位移量存在一个最小单位(最小 设定革位) 13
13 插补问题描述/定义 已知(输入) G代码程序描述零件轮廓或刀位轨迹的直线、圆弧. • 起点、终点-直线 • 起点、终点、圆心、方向-圆弧 进给速度 求解(输出) 进给伺服系统可以接收的指令 • 单位时间内各轴的增量或速度(x,y.) 隐含的限定条件 指令控制的运动方向限制(有限自由度) 指令控制的运动部件的位移量存在一个最小单位(最小 设定单位) 3.4 典型数控功能原理及实现
3.4典型数控功能原理及实现 ◆直线插补问题图解 终点(10,5) G92 X0 Y0 G01X10Y5F500 起点(0,0) 问题描述:如何协调并控制两个坐标轴X,Y的运 动,使得刀具能相对工件从起点沿直线运动到终点. 14
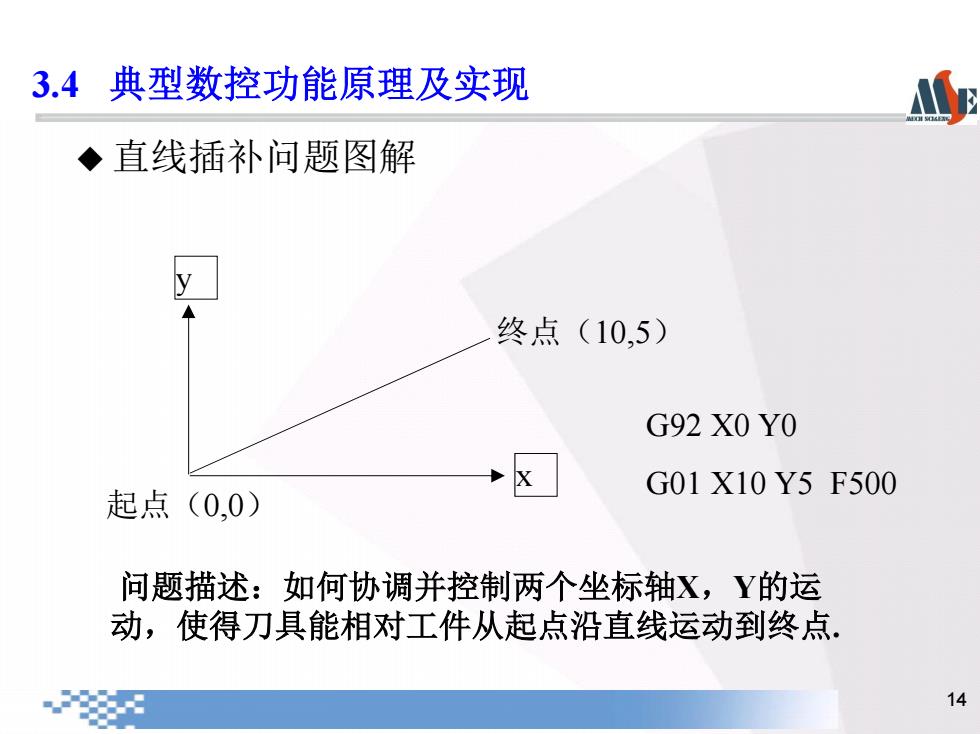
14 直线插补问题图解 起点(0,0) 终点(10,5) G92 X0 Y0 G01 X10 Y5 F500 问题描述:如何协调并控制两个坐标轴X,Y的运 动,使得刀具能相对工件从起点沿直线运动到终点. x y 3.4 典型数控功能原理及实现
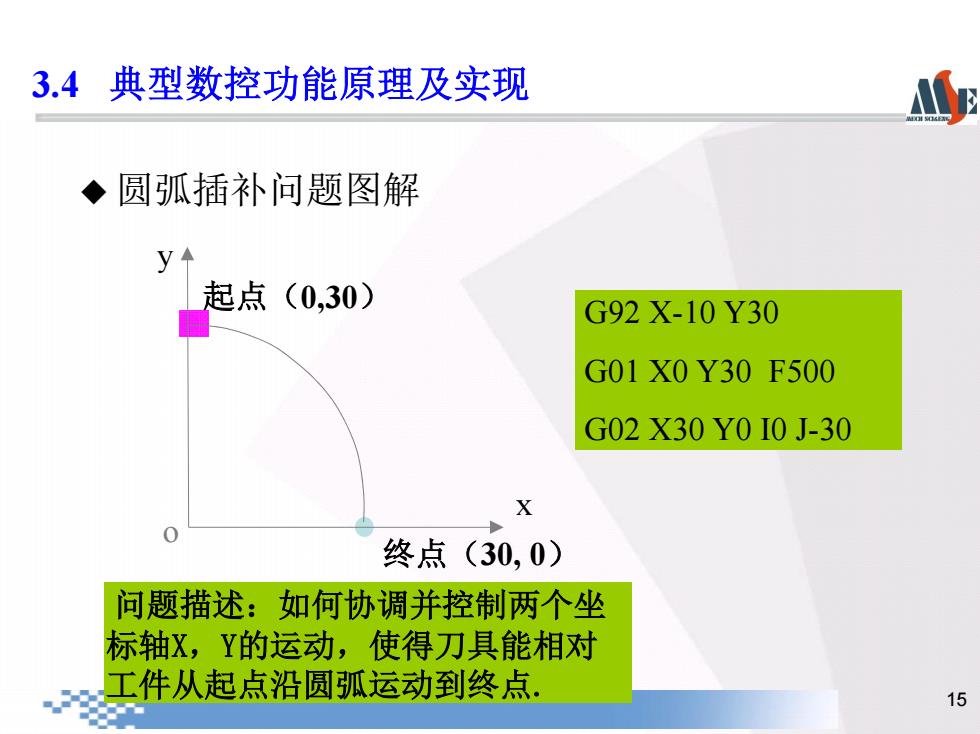
3.4典型数控功能原理及实现 ◆圆弧插补问题图解 起点(0,30) G92X-10Y30 G01X0Y30F500 G02X30Y0I0J-30 X 0 终点(30,0) 问题描述:如何协调并控制两个坐 标轴X,Y的运动,使得刀具能相对 工件从起点沿圆弧运动到终点. 15
15 圆弧插补问题图解 起点(0,30) G92 X-10 Y30 G01 X0 Y30 F500 G02 X30 Y0 I0 J-30 问题描述:如何协调并控制两个坐 标轴X,Y的运动,使得刀具能相对 工件从起点沿圆弧运动到终点. 终点(30, 0) x y o 3.4 典型数控功能原理及实现