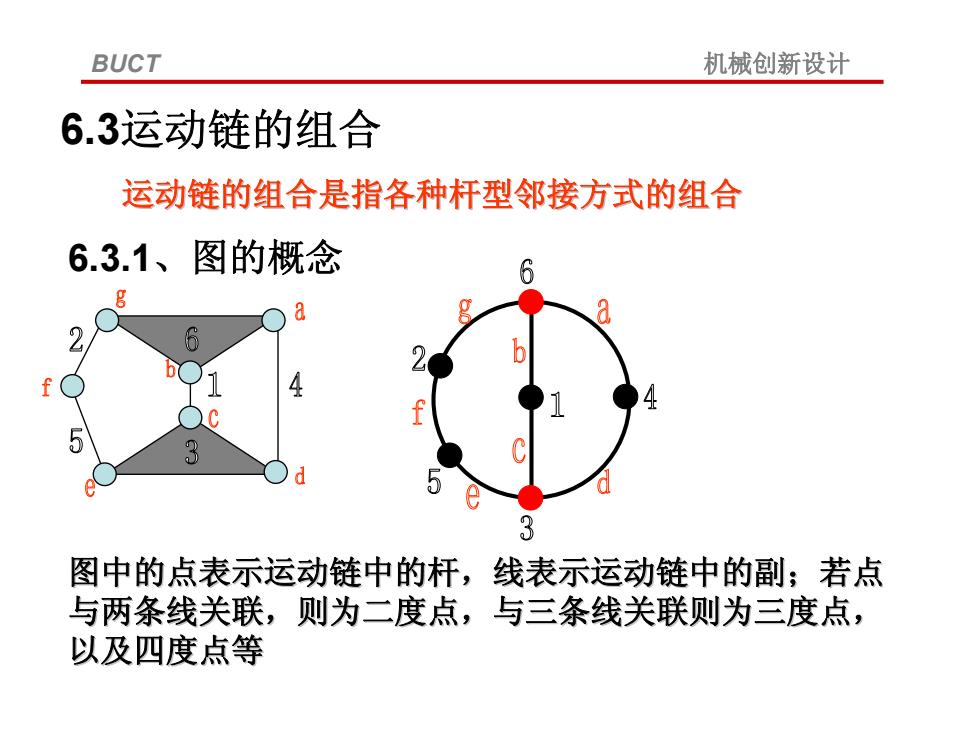
BUCT 机械创新设计 6.3运动链的组合 运动链的组合是指各种杆型邻接方式的组合 6.3.1、图的概念 2 6 4 5 3 3 图中的点表示运动链中的杆,线表示运动链中的副;若点 与两条线关联,则为二度点,与三条线关联则为三度点, 以及四度点等
6.3运动链的组合 运动链的组合是指各种杆型邻接方式的组合 运动链的组合是指各种杆型邻接方式的组合 6.3.1、图的概念 图中的点表示运动链中的杆,线表示运动链中的副;若点 图中的点表示运动链中的杆,线表示运动链中的副;若点 与两条线关联,则为二度点,与三条线关联则为三度点, 与两条线关联,则为二度点,与三条线关联则为三度点, 以及四度点等 BUCT 机械创新设计
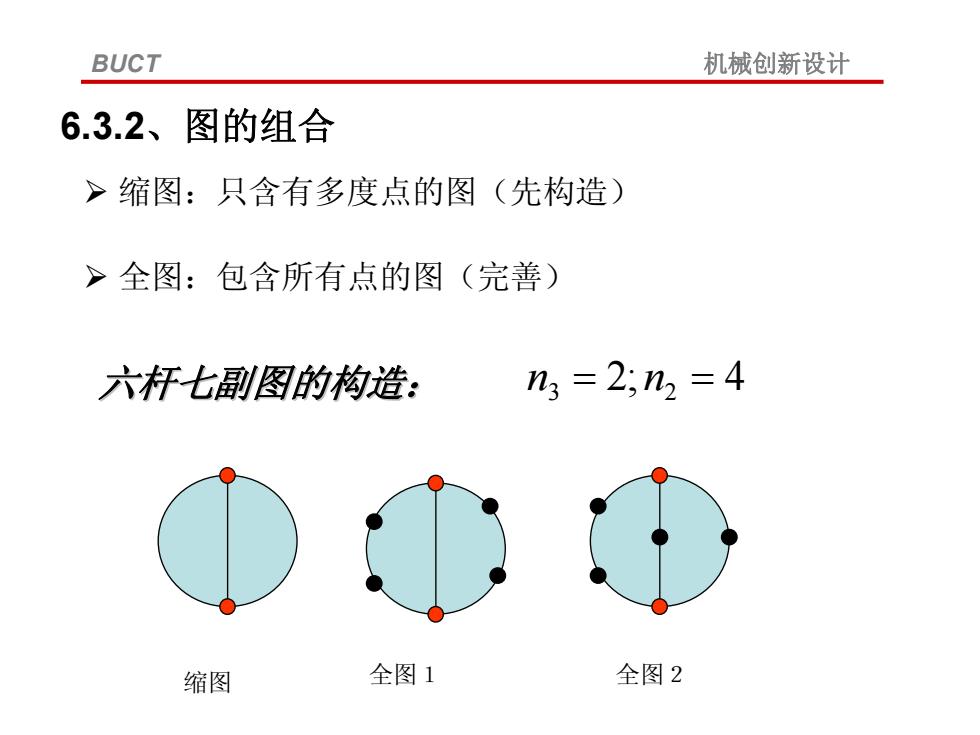
BUCT 机械创新设计 6.3.2、图的组合 >缩图:只含有多度点的图(先构造) >全图:包含所有点的图(完善) 六杆七副图的构造: n3=2,n2=4 缩图 全图1 全图2
6.3.2、图的组合 缩图:只含有多度点的图(先构造) 全图:包含所有点的图(完善) 六杆七副图的构造: 六杆七副图的构造: 4;2 3 nn 2 缩图 全图1 全图2 BUCT 机械创新设计
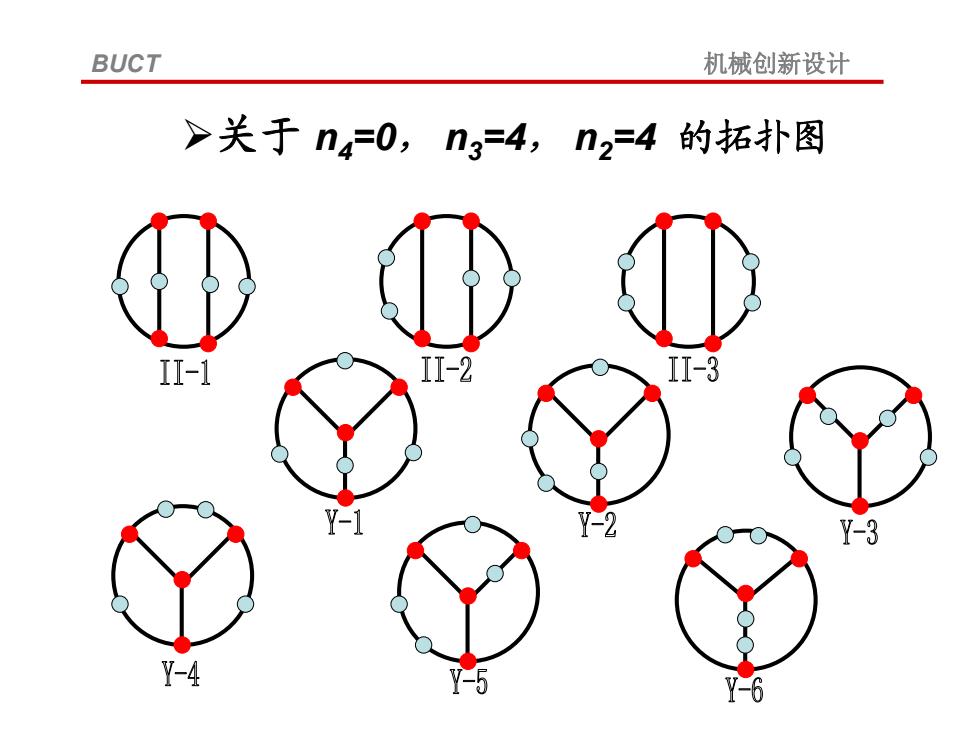
BUCT 机械创新设计 >关于n4=0,n3=4,n2=4的拓扑图 II-1 II-2 II-3 Y-3 Y-4 -5 Y-6
关于 n4 =0, n3 =4, n2 =4 的拓扑图 BUCT 机械创新设计