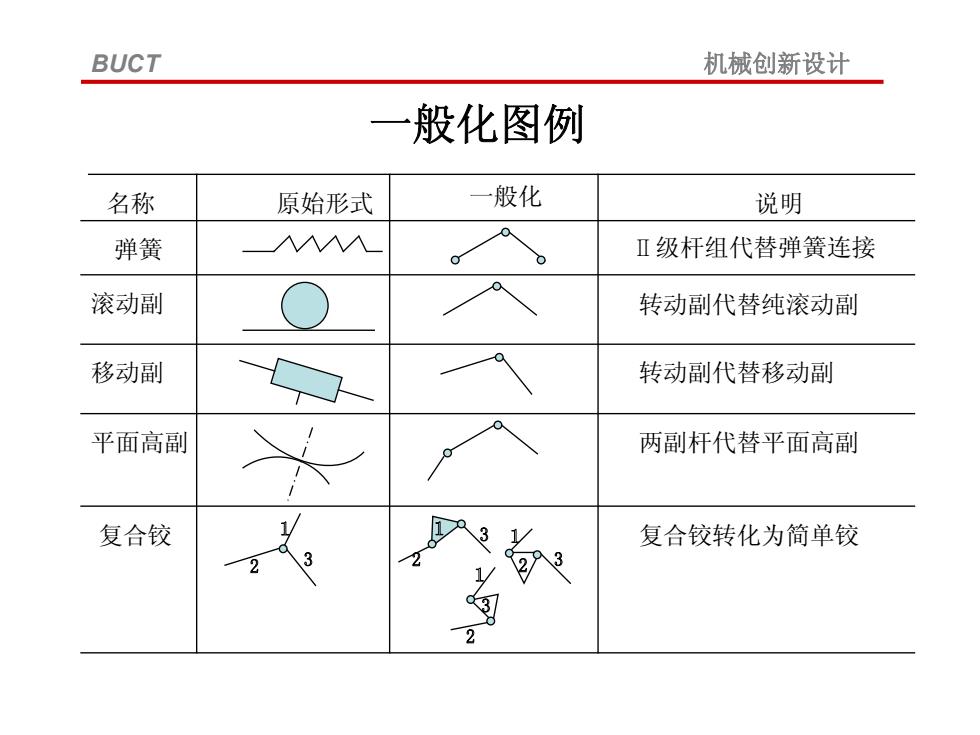
BUCT 机械创新设计 一般化图例 名称 原始形式 般化 说明 弹簧 ∧A入 Ⅱ级杆组代替弹簧连接 滚动副 转动副代替纯滚动副 移动副 转动副代替移动副 平面高副 两副杆代替平面高副 复合铰 3y 复合铰转化为简单铰 2 2 2
一般化图例 名称 原始形式 一般化 说明 弹簧 Ⅱ级杆组代替弹簧连接 滚动副 转动副代替纯滚动副 移动副 转动副代替移动副 平面高副 两副杆代替平面高副 复合铰 复合铰转化为简单铰 BUCT 机械创新设计

BUCT 机械创新设计 6.1.2、实例分析 1.含有平面高副的机构 E 0 6 6 2
6.1.2、实例分析 1. 含有平面高副的机构 含有平面高副的机构 (c‘) (c‘) BUCT 机械创新设计
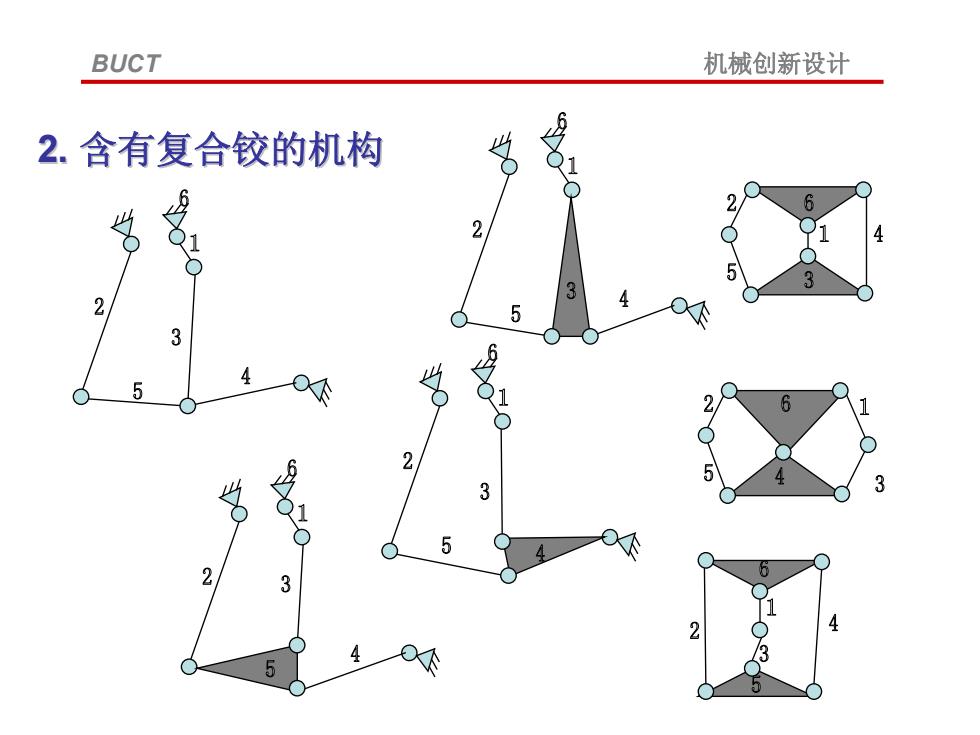
BUCT 机械创新设计 2.含有复合铰的机构 5 3 4 5 3
2. 含有复合铰的机构 含有复合铰的机构 BUCT 机械创新设计

BUCT 机械创新设计 6.2、杆型类配 1.杆型 二副杆,多副杆(三副杆,四副杆等) 2.各类杆型数量的确定 n2+n3+n4+…nn=W (1) 2n2+3n3+4n4+…nnn=2P (2) (2)式-2×(1)式 得:n3+2n4+…(n-2)nn=2(P-N)(3)
6.2、杆型类配 1. 杆型 二副杆,多副杆(三副杆,四副杆等) 2. 各类杆型数量的确定 各类杆型数量的确定 Pnnnnn Nnnnn n n 432 432 2 432 )(2)2(2 )1(2)2( 43 n NPnnnn 得: 式 式 BUCT 机械创新设计
BUCT 机械创新设计 若P,N已知,则多副杆的类型及数目由(3)式可 确定;而二副杆的数目则为: n2 =N-ns-n4-...-nm 3.环及环数的确定 在杆型类配时还要考虑环数的问题。所谓环是指由杆与副 所包围的环状道路。如图所示:
若P,N已知,则多副杆的类型及数目由(3)式可 确定;而二副杆的数目则为: 2 43 nnnNn n 3. 环及环数的确定 环及环数的确定 在杆型类配时还要考虑环数的问题。所谓环是指由杆与副 所谓环是指由杆与副 所包围的环状道路 所包围的环状道路。如图所示: BUCT 机械创新设计