2.点的速度(定义): 速度(velocity) 点在瞬时运动快慢和运动方向的力学量。 dr 速度的方向沿着运动轨迹的切线: ) dt 指向与点的运动方向一致; 速度大小等于矢量的模。 3.点的加速度(定义): 加速度(acceleration) 描述点在瞬时速度大小和方向 变化率的力学量。 do d'r a 加速度的方向为△的极限方向 dt dt2 (指向与轨迹曲线的凹向一致) 加速度大小等于矢量的模
2.点的速度(定义): t r d d = t a d d = 2 2 d d t r = 3.点的加速度(定义): 速度(velocity) 速度大小等于矢量的模。 指向与点的运动方向一致; 速度的方向沿着运动轨迹的切线; 点在t瞬时运动快慢和运动方向的力学量。 加速度(acceleration) 加速度大小等于矢量a的模。 加速度的方向为v的极限方向 (指向与轨迹曲线的凹向一致) 描述点在t瞬时速度大小和方向 变化率的力学量

小结 (1)矢径r,运动方程 r=r() (2)轨迹-矢端曲线 (3)有限位移 dr=r(i+4t)-r( (4)速度 p= dr dt (5)加速度 dv d'r a= dt2
小结

二直角坐标法 设动点M在空间运动,它在空间任一瞬时的位置也可用 一个固体的直角坐标系的三个坐标x,y,z来确定: 1.点的运动方程x=f(t) y=f(t) M z=6(t) F=xi+yj+z水 Y(t) (解析式)
二 直角坐标法 设动点M 在空间运动,它在空间任一瞬时的位置也可用 一个固体的直角坐标系的三个坐标x, y, z来确定: 1. 点的运动方程 x f (t) = 1 y f (t) = 2 z f (t) = 3 ( ) i j k 解析式 r = x + y + z O M r z(t) y(t) x(t) z y x

2.点的速度: F=xi+yj+zk d = dt i+业j+出+i++z水 d dt dt (Oz)为定参考系 i-j-k-0 =可+可,+ M -vitvj+v.k (t)i x(t) ) 2 2 二 Vx +,2+u
2. 点的速度: i j k r = x + y + z t r d d = k xi yj zk d d j d d i d d = + + + + + t z t y t x 2 2 2 = x + y + z x y z v v v v = + + i j k x y z v = v + v + v O M r z y x z(t) y(t) x(t) i = j = k = 0 (Oxyz)为定参考系
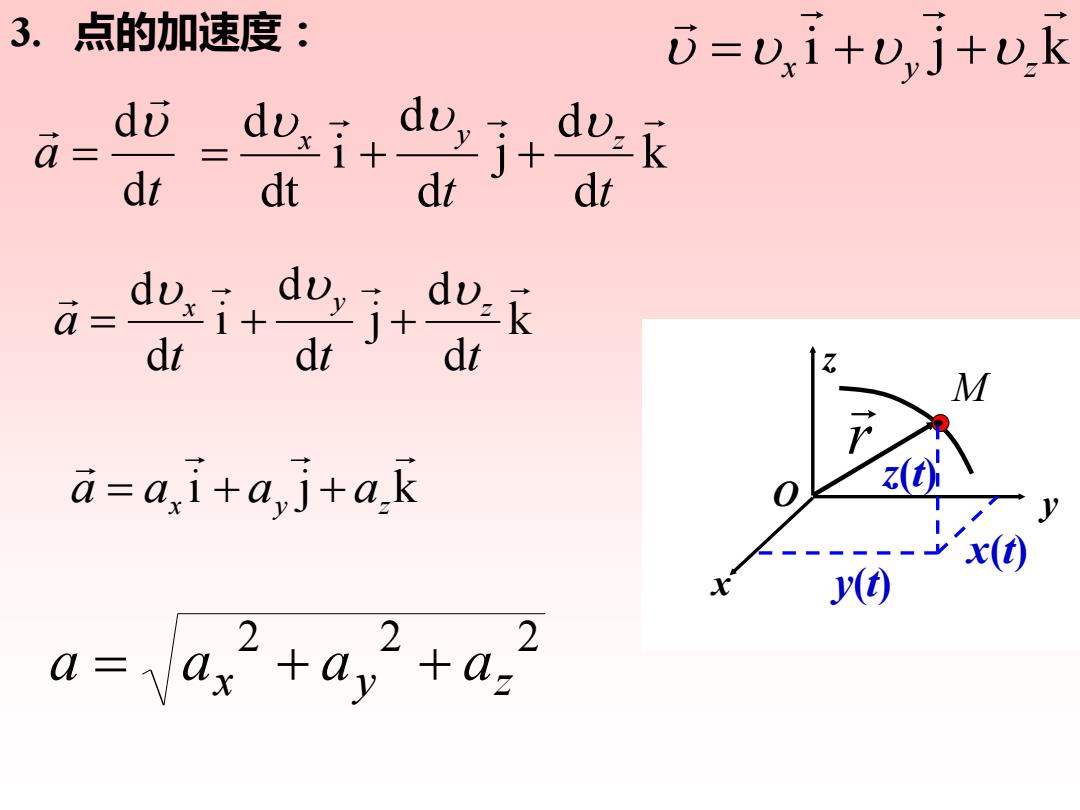
3.点的加速度: B=vitv,j+ok dv a- di+业j+d dt d dt dt 0 J+ dt dt dt M a-a,i+a,j+ak x(t) X () a-jas2+a 2 +az
t a d d = 2 2 2 a = ax + ay + az i j k =x + y +z 3. 点的加速度: k d d j d d i d d t t t a x y z = + + k d d j d d i dt d t t x y z = + + i j k a = ax + ay + az O M r z y x z(t) y(t) x(t)