Section 9.1 The 2DOF Structure for Stable Plants Robustness:If there exists uncertainty,the reference response cannot be thoroughly isolated from the disturbance response.In this case,the robust stability and the disturbance response is only determined by A1,while the reference response is mainly determined by A2 For robustness tuning,one can monotonically increase the performance degrees until the required response is obtained. Implementation: If the plant is stable,C(s)can be implemented in the IMC structure.When C(s)is implemented as the unity feedback controller by using rational approximations,the augmented plant is G(s)C1(s) T(s)= 1+G(s)C1(s) 4口,+@,4定4=定0C Zhang.W.D..CRC Press.2011 Version 1.0 13/95
Section 9.1 The 2DOF Structure for Stable Plants Robustness: If there exists uncertainty, the reference response cannot be thoroughly isolated from the disturbance response. In this case, the robust stability and the disturbance response is only determined by λ1, while the reference response is mainly determined by λ2 For robustness tuning, one can monotonically increase the performance degrees until the required response is obtained. Implementation: If the plant is stable, C1(s) can be implemented in the IMC structure. When C1(s) is implemented as the unity feedback controller by using rational approximations, the augmented plant is T(s) = G(s)C1(s) 1 + G(s)C1(s) Zhang, W.D., CRC Press, 2011 Version 1.0 13/95
Section 9.1 The 2DOF Structure for Stable Plants Robustness:If there exists uncertainty,the reference response cannot be thoroughly isolated from the disturbance response.In this case,the robust stability and the disturbance response is only determined by A1,while the reference response is mainly determined by A2 For robustness tuning,one can monotonically increase the performance degrees until the required response is obtained. Implementation: If the plant is stable,Ci(s)can be implemented in the IMC structure.When Ci(s)is implemented as the unity feedback controller by using rational approximations,the augmented plant is G(s)Ci(s) T(S)=1+G(5)C1⑤ 4口,+@,4定4=定0C Zhang.W.D..CRC Press.2011 Version 1.0 13/95
Section 9.1 The 2DOF Structure for Stable Plants Robustness: If there exists uncertainty, the reference response cannot be thoroughly isolated from the disturbance response. In this case, the robust stability and the disturbance response is only determined by λ1, while the reference response is mainly determined by λ2 For robustness tuning, one can monotonically increase the performance degrees until the required response is obtained. Implementation: If the plant is stable, C1(s) can be implemented in the IMC structure. When C1(s) is implemented as the unity feedback controller by using rational approximations, the augmented plant is T(s) = G(s)C1(s) 1 + G(s)C1(s) Zhang, W.D., CRC Press, 2011 Version 1.0 13/95
Section 9.1 The 2DOF Structure for Stable Plants Remove the time delay in the numerator of T(s).The optimal C2(s)should be the inverse of the remainder of T(s).Since the denominator of T(s)contains a time delay,C2(s)contains a time delay.To implement C2(s),rational approximations have to be used.Design methods utilizing rational approximations have been studied well in foregoing chapters and thus are not repeated here In Figure,a new 2DOF structure is given.To distinguish it from Structure I,it is named "Structure II".In Structure ll,C3(s)is the controller for the disturbance loop,and Ca(s)is the controller for the reference loop.If let Ci(s) C3(5) C2(5) Ca(s)+G(s)C3(s) C3(s) then Structure I and Structure ll are equivalent to each other 4口+0:4定4生定9QC Zhang,W.D..CRC Press.2011 Version 1.0 14/95
Section 9.1 The 2DOF Structure for Stable Plants Remove the time delay in the numerator of T(s). The optimal C2(s) should be the inverse of the remainder of T(s). Since the denominator of T(s) contains a time delay, C2(s) contains a time delay. To implement C2(s), rational approximations have to be used. Design methods utilizing rational approximations have been studied well in foregoing chapters and thus are not repeated here In Figure, a new 2DOF structure is given. To distinguish it from Structure I, it is named “Structure II”. In Structure II, C3(s) is the controller for the disturbance loop, and C4(s) is the controller for the reference loop. If let C1(s) = C3(s) C2(s) = C4(s) + G(s)C3(s) C3(s) then Structure I and Structure II are equivalent to each other Zhang, W.D., CRC Press, 2011 Version 1.0 14/95

Section 9.1 The 2DOF Structure for Stable Plants Remove the time delay in the numerator of T(s).The optimal C2(s)should be the inverse of the remainder of T(s).Since the denominator of T(s)contains a time delay,C2(s)contains a time delay.To implement C2(s),rational approximations have to be used.Design methods utilizing rational approximations have been studied well in foregoing chapters and thus are not repeated here In Figure,a new 2DOF structure is given.To distinguish it from Structure I,it is named "Structure Il".In Structure Il,C3(s)is the controller for the disturbance loop,and C4(s)is the controller for the reference loop.If let C1(s)= C3(s) C2(s) C4(s)+G(s)C3(s) C3(s) then Structure I and Structure ll are equivalent to each other Zhang,W.D..CRC Press.2011 Version 1.0 14/95
Section 9.1 The 2DOF Structure for Stable Plants Remove the time delay in the numerator of T(s). The optimal C2(s) should be the inverse of the remainder of T(s). Since the denominator of T(s) contains a time delay, C2(s) contains a time delay. To implement C2(s), rational approximations have to be used. Design methods utilizing rational approximations have been studied well in foregoing chapters and thus are not repeated here In Figure, a new 2DOF structure is given. To distinguish it from Structure I, it is named “Structure II”. In Structure II, C3(s) is the controller for the disturbance loop, and C4(s) is the controller for the reference loop. If let C1(s) = C3(s) C2(s) = C4(s) + G(s)C3(s) C3(s) then Structure I and Structure II are equivalent to each other Zhang, W.D., CRC Press, 2011 Version 1.0 14/95
Section 9.1 The 2DOF Structure for Stable Plants G Figure:New 2DOF system The feature of Structure ll is that both of the two controllers can be directly designed.The design of C3(s)is similar to that for the unity feedback loop controller.Since the reference loop is an open one for the nominal plant,C4(s)can be designed as the inverse of the rational part of the plant 4口,4@,4定4色 定QC Zhang.W.D..CRC Press.2011 Version 1.0 15/95
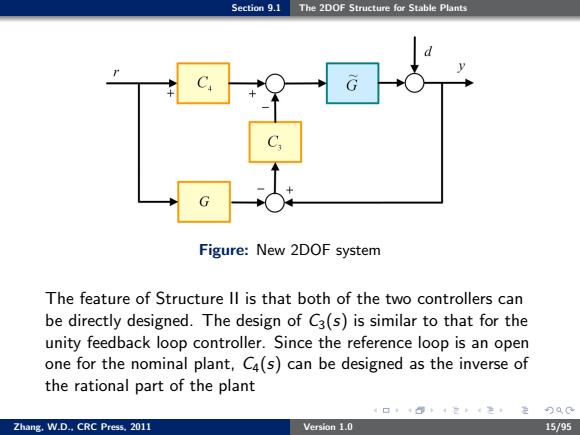
Section 9.1 The 2DOF Structure for Stable Plants Figure: New 2DOF system The feature of Structure II is that both of the two controllers can be directly designed. The design of C3(s) is similar to that for the unity feedback loop controller. Since the reference loop is an open one for the nominal plant, C4(s) can be designed as the inverse of the rational part of the plant Zhang, W.D., CRC Press, 2011 Version 1.0 15/95