段。因此机械的运动循环T可表示为: T=1工作十1空程+【停歌 等式右边三项分别表示机构工作行程时间、空回行程时间和停歇时间, 2.机械运动循环图 机械运动循环图,又称工作循环图,是用来表示在机械的一个工作循环中各执行构件间动作 协调配合关系的图形, 1)机械运动循环图的功用 机械运动循环图对执行系统的设计起到非常重要的作用,特别是有多个执行机构协同工作的 执行系统。 (1)机器的工作循环图反映其生产节奏,可以用来衡量核算机器的生产率,并可用来作为 分析、研究提高机械生产率的依据。 (2)确定各个执行机构原动件在主轴上的相位,或者控制各个执行机构原动件的凸轮安装 在分配轴上的相位。 (3)指导机器中各个执行机构的具体设计 (4)作为装配、调试机器的依据。 (5)分析、研究各执行机构的动作如何能够紧密配合、相互协调,以保证机器的工艺动作 过程顺利实现。 2)机器运动循环图的绘制 绘制工作循环图时,首先应选择一个定标构件,其它构件的运动时间都以此构件的运动基准 来表示。通常以机器的主轴或分配轴作定标构件,因为这些轴和机器中所有的轴都有联系,且其 整转数往往就是机器的一个工作循环。工作循环图的绘制步骤如下: (1)确定所有执行机构的运动循环: (2)确定所有运动循环的组成区段: (3)确定运动循环内各区段的时间或分配轴的转角: (4)绘制执行系统的运动循环图 绘制机器运动循环图是一个复杂的过程,应考虑以下诸多注意事项。 (1)以工艺过程的开始点作为机器运动循环起始点,确定最先开始运行的执行机构在运动 循环图中的位置,其他执行机构则按照工艺程序先后次序列出。 (2)因为运动循环图以主轴或者分配轴的转角为横坐标,对于不在主轴或分配轴上各执行 机构的原动件比如凸轮、曲柄、偏心轮等等,应把它们运动时所对应的转角转换成主轴或分配轴 上相应的转角。 (3)考虑到机器制造、安装时不可避免的会产生误差,为防止两机构在工作过程中发生干 涉,应在理论计算正好不发生干涉的临界基础上再给以适当的余量,即把两机构的运动相位错开 到足够大,以确保动作可靠。 (4)应尽量使执行机构的动作重合,以便缩短机器的工作循环周期,提高生产率。 251
251 段。因此机械的运动循环 T 可表示为: T = t工作 + t空程 + t停歇 等式右边三项分别表示机构工作行程时间、空回行程时间和停歇时间。 2.机械运动循环图 机械运动循环图,又称工作循环图,是用来表示在机械的一个工作循环中各执行构件间动作 协调配合关系的图形。 1)机械运动循环图的功用 机械运动循环图对执行系统的设计起到非常重要的作用,特别是有多个执行机构协同工作的 执行系统。 (1)机器的工作循环图反映其生产节奏,可以用来衡量核算机器的生产率,并可用来作为 分析、研究提高机械生产率的依据。 (2)确定各个执行机构原动件在主轴上的相位,或者控制各个执行机构原动件的凸轮安装 在分配轴上的相位。 (3)指导机器中各个执行机构的具体设计。 (4)作为装配、调试机器的依据。 (5)分析、研究各执行机构的动作如何能够紧密配合、相互协调,以保证机器的工艺动作 过程顺利实现。 2)机器运动循环图的绘制 绘制工作循环图时,首先应选择一个定标构件,其它构件的运动时间都以此构件的运动基准 来表示。通常以机器的主轴或分配轴作定标构件,因为这些轴和机器中所有的轴都有联系,且其 整转数往往就是机器的一个工作循环。工作循环图的绘制步骤如下: (1)确定所有执行机构的运动循环; (2)确定所有运动循环的组成区段; (3)确定运动循环内各区段的时间或分配轴的转角; (4)绘制执行系统的运动循环图。 绘制机器运动循环图是一个复杂的过程,应考虑以下诸多注意事项。 (1)以工艺过程的开始点作为机器运动循环起始点,确定最先开始运行的执行机构在运动 循环图中的位置,其他执行机构则按照工艺程序先后次序列出。 (2)因为运动循环图以主轴或者分配轴的转角为横坐标,对于不在主轴或分配轴上各执行 机构的原动件比如凸轮、曲柄、偏心轮等等,应把它们运动时所对应的转角转换成主轴或分配轴 上相应的转角。 (3)考虑到机器制造、安装时不可避免的会产生误差,为防止两机构在工作过程中发生干 涉,应在理论计算正好不发生干涉的临界基础上再给以适当的余量,即把两机构的运动相位错开 到足够大,以确保动作可靠。 (4)应尽量使执行机构的动作重合,以便缩短机器的工作循环周期,提高生产率
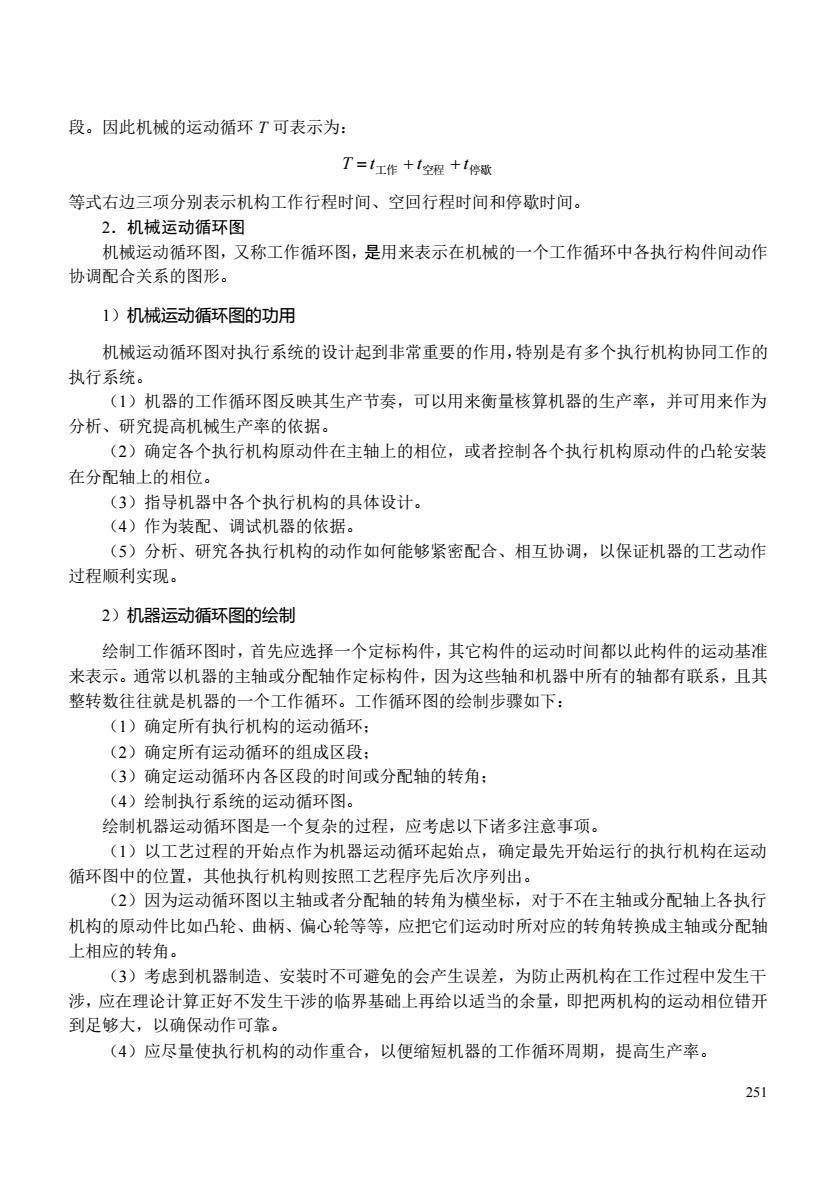
(5)在不影响工艺动作要求和生产率的条件下,尽可能使各执行机构工作行程对应的中心 角增大些,以减小凸轮的压力角。 3)机械运动循环图的类型 常见的机械运动循环图有直线式运动循环图、圆周式运动循环图和直角坐标式运动循环图, 下面以粉料成型压片机为例说明各种机械运动循环图的绘制方法和特点,并列于表12-2中。 如图125所示的粉料成型压片机中,执行机构有料斗送料机构、上冲头运动机构、下冲头 运动机构。其压片过程的工艺流程由六个工艺动作完成: (1)加料斗a下料到料筛b中,如图12-6a所示: (2)料筛b右移模腔c上方,同时顶开已成型的片坯e,如图12-6b所示: (3)料筛b在模腔c上方往复振动,送入干粉后,退出,如图12-6c所示: (4)下冲头∫下沉,以防粉料扑出,然后上冲头d进入模腔c,如图12-6d所示: (5)上下冲头同时加压,并保压一段时间,如图12-6所示: (6)上冲头d退出,下冲头顶出片坯e,如图12-6f所示。 (o 图12-5粉料成型压片机 中邱
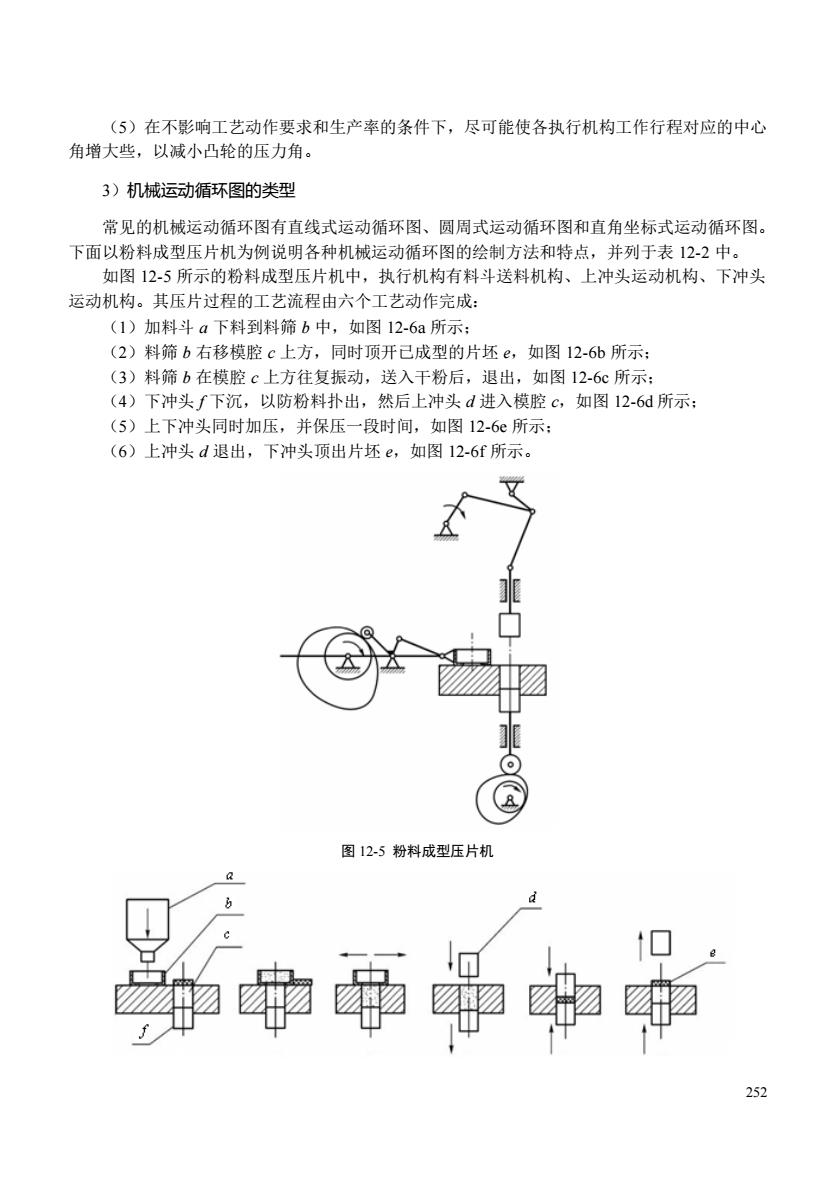
252 (5)在不影响工艺动作要求和生产率的条件下,尽可能使各执行机构工作行程对应的中心 角增大些,以减小凸轮的压力角。 3)机械运动循环图的类型 常见的机械运动循环图有直线式运动循环图、圆周式运动循环图和直角坐标式运动循环图。 下面以粉料成型压片机为例说明各种机械运动循环图的绘制方法和特点,并列于表 12-2 中。 如图 12-5 所示的粉料成型压片机中,执行机构有料斗送料机构、上冲头运动机构、下冲头 运动机构。其压片过程的工艺流程由六个工艺动作完成: (1)加料斗 a 下料到料筛 b 中,如图 12-6a 所示; (2)料筛 b 右移模腔 c 上方,同时顶开已成型的片坯 e,如图 12-6b 所示; (3)料筛 b 在模腔 c 上方往复振动,送入干粉后,退出,如图 12-6c 所示; (4)下冲头 f 下沉,以防粉料扑出,然后上冲头 d 进入模腔 c,如图 12-6d 所示; (5)上下冲头同时加压,并保压一段时间,如图 12-6e 所示; (6)上冲头 d 退出,下冲头顶出片坯 e,如图 12-6f 所示。 图 12-5 粉料成型压片机
(a) (b) (c) (d) (c) (f) 图12.6粉料成型压片机工艺流程 设计粉料成型压片机工作循环图时,以上冲头机构中的曲柄作为定标构件。如图12a所示 为粉料成型压片机的直线式运动循环图,其横坐标表示定标曲柄的转角。:图12-b所示为粉料 成型压片机的圆周式运动循环图,定标曲柄每旋转一周为一个运动循环:图127飞所示的是粉料 成型压片机的直角坐标式运动循环图,图中横坐标是定标曲柄的运动转角?,纵坐标表示上冲头、 下冲头、送料筛的运动位移。 送料筛 停止 停止 上冲头 下冲头下沉 下冲头加压 0 (a)直线式运动循环图 1 (b)圆周式运动循环图 253
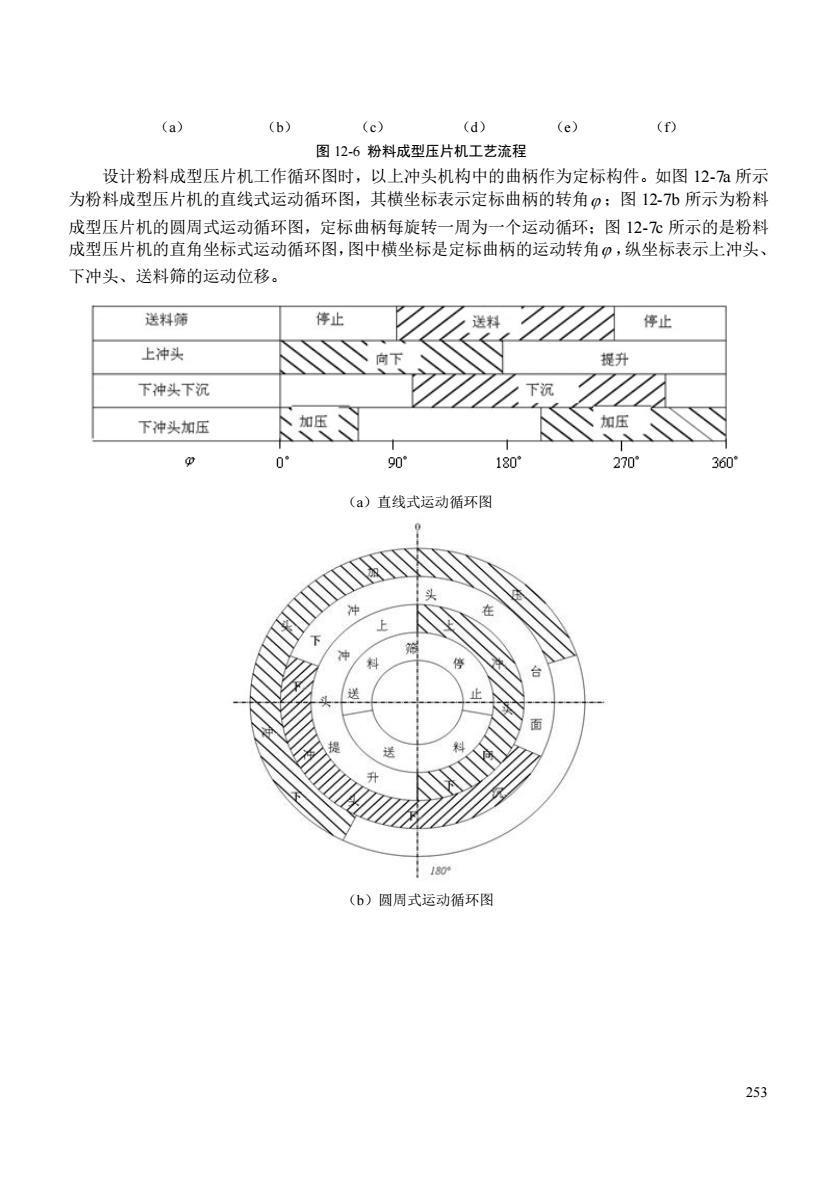
253 (a) (b) (c) (d) (e) (f) 图 12-6 粉料成型压片机工艺流程 设计粉料成型压片机工作循环图时,以上冲头机构中的曲柄作为定标构件。如图 12-7a 所示 为粉料成型压片机的直线式运动循环图,其横坐标表示定标曲柄的转角 ;图 12-7b 所示为粉料 成型压片机的圆周式运动循环图,定标曲柄每旋转一周为一个运动循环;图 12-7c 所示的是粉料 成型压片机的直角坐标式运动循环图,图中横坐标是定标曲柄的运动转角 ,纵坐标表示上冲头、 下冲头、送料筛的运动位移。 (a)直线式运动循环图 (b)圆周式运动循环图
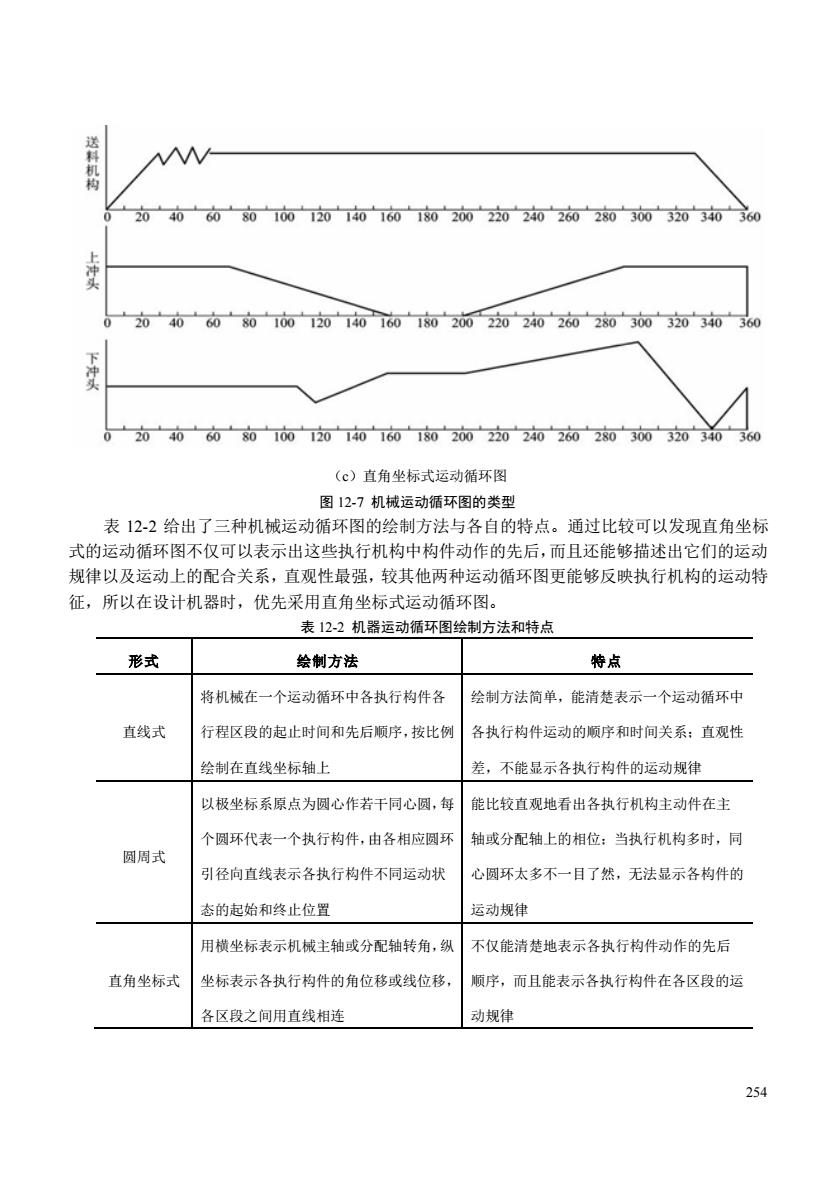
送料机构 办00动0001010广00广202020广0广03036 0广2040广60广80100广12010160广10广20020广240广260280300320340360 茹广400广00001600广020240广02000030 (©)直角坐标式运动循环图 图12-7机械运动循环图的类型 表12-2给出了三种机械运动循环图的绘制方法与各自的特点。通过比较可以发现直角坐标 式的运动循环图不仅可以表示出这些执行机构中构件动作的先后,而且还能够描述出它们的运动 规律以及运动上的配合关系,直观性最强,较其他两种运动循环图更能够反映执行机构的运动特 征,所以在设计机器时,优先采用直角坐标式运动循环图。 表12-2机器运动循环图绘制方法和特点 形式 绘制方法 特点 将机械在一个运动循环中各执行构件各 绘制方法简单,能清楚表示一个运动循环中 直线式 行程区段的起止时间和先后顺序,按比例 各执行构件运动的顺序和时间关系:直观性 绘制在直线坐标轴上 差,不能显示各执行构件的运动规律 以极坐标系原点为圆心作若干同心圆,每 能比较直观地看出各执行机构主动件在主 个圆环代表一个执行构件,由各相应圆环 轴或分配轴上的相位:当执行机构多时,同 圆周式 引径向直线表示各执行构件不同运动状 心圆环太多不一目了然,无法显示各构件的 态的起始和终止位置 运动规律 用横坐标表示机械主轴或分配轴转角,纵 不仅能清楚地表示各执行构件动作的先后 直角坐标式 坐标表示各执行构件的角位移或线位移 顺序,而且能表示各执行构件在各区段的运 各区段之间用直线相连 动规律 254
254 (c)直角坐标式运动循环图 图 12-7 机械运动循环图的类型 表 12-2 给出了三种机械运动循环图的绘制方法与各自的特点。通过比较可以发现直角坐标 式的运动循环图不仅可以表示出这些执行机构中构件动作的先后,而且还能够描述出它们的运动 规律以及运动上的配合关系,直观性最强,较其他两种运动循环图更能够反映执行机构的运动特 征,所以在设计机器时,优先采用直角坐标式运动循环图。 表 12-2 机器运动循环图绘制方法和特点 形式 绘制方法 特点 直线式 将机械在一个运动循环中各执行构件各 行程区段的起止时间和先后顺序,按比例 绘制在直线坐标轴上 绘制方法简单,能清楚表示一个运动循环中 各执行构件运动的顺序和时间关系;直观性 差,不能显示各执行构件的运动规律 圆周式 以极坐标系原点为圆心作若干同心圆,每 个圆环代表一个执行构件,由各相应圆环 引径向直线表示各执行构件不同运动状 态的起始和终止位置 能比较直观地看出各执行机构主动件在主 轴或分配轴上的相位;当执行机构多时,同 心圆环太多不一目了然,无法显示各构件的 运动规律 直角坐标式 用横坐标表示机械主轴或分配轴转角,纵 坐标表示各执行构件的角位移或线位移, 各区段之间用直线相连 不仅能清楚地表示各执行构件动作的先后 顺序,而且能表示各执行构件在各区段的运 动规律
12.4机构的选型和组合 12.4.1常用机构的特点 任何机器都是由若干个机构组成的,传统的机构型式有:连杆机构、齿轮机构、凸轮机构、 摩擦机构、螺旋机构和间歇运动机构等。当然随着科学技术迅速发展,引入液、气、声、光、电、 磁等工作原理的新型运动机构(广义机构)应用日益广泛。本章对广义机构不作详细介绍。 上述传统机构已经相对成熟,各具优点,如连杆机构结构简单,运动平稳,可获得较大行程: 齿轮机构结构紧凑、工作可靠、承载能力大、效率高:凸轮机构能够实现精确的曲线轨迹:螺旋 机构可获得较大的传动比和较高的运动精度:凸轮式间歇运动机构分度、定位准确等。但是它们 在结构特点、运动特性、动力性能及制造工艺等诸多方面仍存在以下不可逾越的局限。 1.连杆机构 (1)难以精确地实现预期的运动规律或运动轨迹,设计理论较复杂。 (2)不易实现从动件较长时间的停歇。 (3)运动链较长,占用空间大,运动累积误差大,运动副磨损后不易调整,影响运动精度 和工作可靠性。 (4)连杆惯性力不易平衡,动力性能差,不宜用于高速场合。 2.齿轮机构 (1)运动形式简单,圆形齿轮不能实现变速比的运动规律。 (2)对误差较为敏感,制造和安装的精度要求高。 (3)非圆形齿轮可以实现变速比的运动规律,但其制造困难。 3.凸轮机构 (1)高副接触,易磨损,在高速场合下影响运动精度和工作可靠性。 (2)直动从动件行程不宜过大,摆动从动件摆角不宜过大。 (3)凸轮轮廓加工较困难。 4.其他机构 (1)螺旋机构的机械效率低,需要反向机构才能反向运动。 (2)棘轮机构工作时有冲击,传动精度较低。 (3)槽轮机构每次转角不宜太大或太小,且不可调。 (4)凸轮式间歇运动机构的凸轮加工困难,安装调整精度要求高, 12.4.2机构的选型 1.机构选型 机构的选型是指选择或创造出满足执行构件运动和动力要求的机构。根据己知的设计要求, 按执行构件的运动形式及运动功能要求,先在基本机构中进行类比选择,当基本机构不能满足运 动或动力要求时,才考虑对基本机构进行组合、变异等方法形成新的机构,或选用组合机构。如 果很难找到满足工作要求的现有机构,这时要求改变机械的工作原理和工艺动作或创造新型机 255
255 12.4 机构的选型和组合 12.4.1 常用机构的特点 任何机器都是由若干个机构组成的,传统的机构型式有:连杆机构、齿轮机构、凸轮机构、 摩擦机构、螺旋机构和间歇运动机构等。当然随着科学技术迅速发展,引入液、气、声、光、电、 磁等工作原理的新型运动机构(广义机构)应用日益广泛。本章对广义机构不作详细介绍。 上述传统机构已经相对成熟,各具优点,如连杆机构结构简单,运动平稳,可获得较大行程; 齿轮机构结构紧凑、工作可靠、承载能力大、效率高;凸轮机构能够实现精确的曲线轨迹;螺旋 机构可获得较大的传动比和较高的运动精度;凸轮式间歇运动机构分度、定位准确等。但是它们 在结构特点、运动特性、动力性能及制造工艺等诸多方面仍存在以下不可逾越的局限。 1.连杆机构 (1)难以精确地实现预期的运动规律或运动轨迹,设计理论较复杂。 (2)不易实现从动件较长时间的停歇。 (3)运动链较长,占用空间大,运动累积误差大,运动副磨损后不易调整,影响运动精度 和工作可靠性。 (4)连杆惯性力不易平衡,动力性能差,不宜用于高速场合。 2.齿轮机构 (1)运动形式简单,圆形齿轮不能实现变速比的运动规律。 (2)对误差较为敏感,制造和安装的精度要求高。 (3)非圆形齿轮可以实现变速比的运动规律,但其制造困难。 3.凸轮机构 (1)高副接触,易磨损,在高速场合下影响运动精度和工作可靠性。 (2)直动从动件行程不宜过大,摆动从动件摆角不宜过大。 (3)凸轮轮廓加工较困难。 4.其他机构 (1)螺旋机构的机械效率低,需要反向机构才能反向运动。 (2)棘轮机构工作时有冲击,传动精度较低。 (3)槽轮机构每次转角不宜太大或太小,且不可调。 (4)凸轮式间歇运动机构的凸轮加工困难,安装调整精度要求高。 12.4.2 机构的选型 1.机构选型 机构的选型是指选择或创造出满足执行构件运动和动力要求的机构。根据已知的设计要求, 按执行构件的运动形式及运动功能要求,先在基本机构中进行类比选择,当基本机构不能满足运 动或动力要求时,才考虑对基本机构进行组合、变异等方法形成新的机构,或选用组合机构。如 果很难找到满足工作要求的现有机构,这时要求改变机械的工作原理和工艺动作或创造新型机