(3)根据@式,当△MM≥(M+m)/2的时候,⑧式不再成立,轨道不再是椭圆。所以 若M'星和m星最终能永远分开,须满足 △M2(M+m)/2 ⑦ 由题意知 M>△M ⑧ 联立⑦⑧式知,还须满足 M>m ⑨ ⑥⑨式即为所求的条件。 三、(35分)熟练的荡秋千的人能够通过 在秋千板上适时站起和蹲下使秋千越荡 越高。一质量为m的人荡一架底板和摆杆 均为刚性的秋千,底板和摆杆的质量均可 忽略,假定人的质量集中在其质心。人在 秋千上每次完全站起时其质心距悬点O 的距离为',完全蹲下时此距离变为 I+d。实际上,人在秋千上站起和蹲下过 程都是在一段时间内完成的。作为一个简 B h 单的模型,假设人在第一个最高点A点从 完全站立的姿势迅速完全下蹲,然后荡至 B 最低点B,A与B的高度差为h1:随后他 在B点迅速完全站起(且最终径向速度为零),继而随秋千荡至第二个最高点C,这一过程 中该人质心运动的轨迹如图所示。此后人以同样的方式回荡,重复前述过程,荡向第3、4 等最高点。假设人在站起和蹲下的过程中,人与秋千的相互作用力始终与摆杆平行。以最低 点B为重力势能零点。 (1)假定在始终完全蹲下和始终完全站立过程中没有机械能损失,求该人质心在 A→A'→B→B'→C各个阶段的机械能及其变化: (2)假定在始终完全蹲下和始终完全站立过程中的机械能损失△E与过程前后高度差的绝 对值△h的关系分别为 △E=kmg(h+△h),0<k<1,始终完全蹲下: △E=k3mg(%+△h),0<k3<1,始终完全站立. 这里,k、k、和心是常量,8是重 力加速度的大小。求 (i)相对于B点,第n个最高点的高度 h与第n+1个最高点的高度hn+l之间 的关系: (i)h。与h之间的关系式和h1-h.与 h
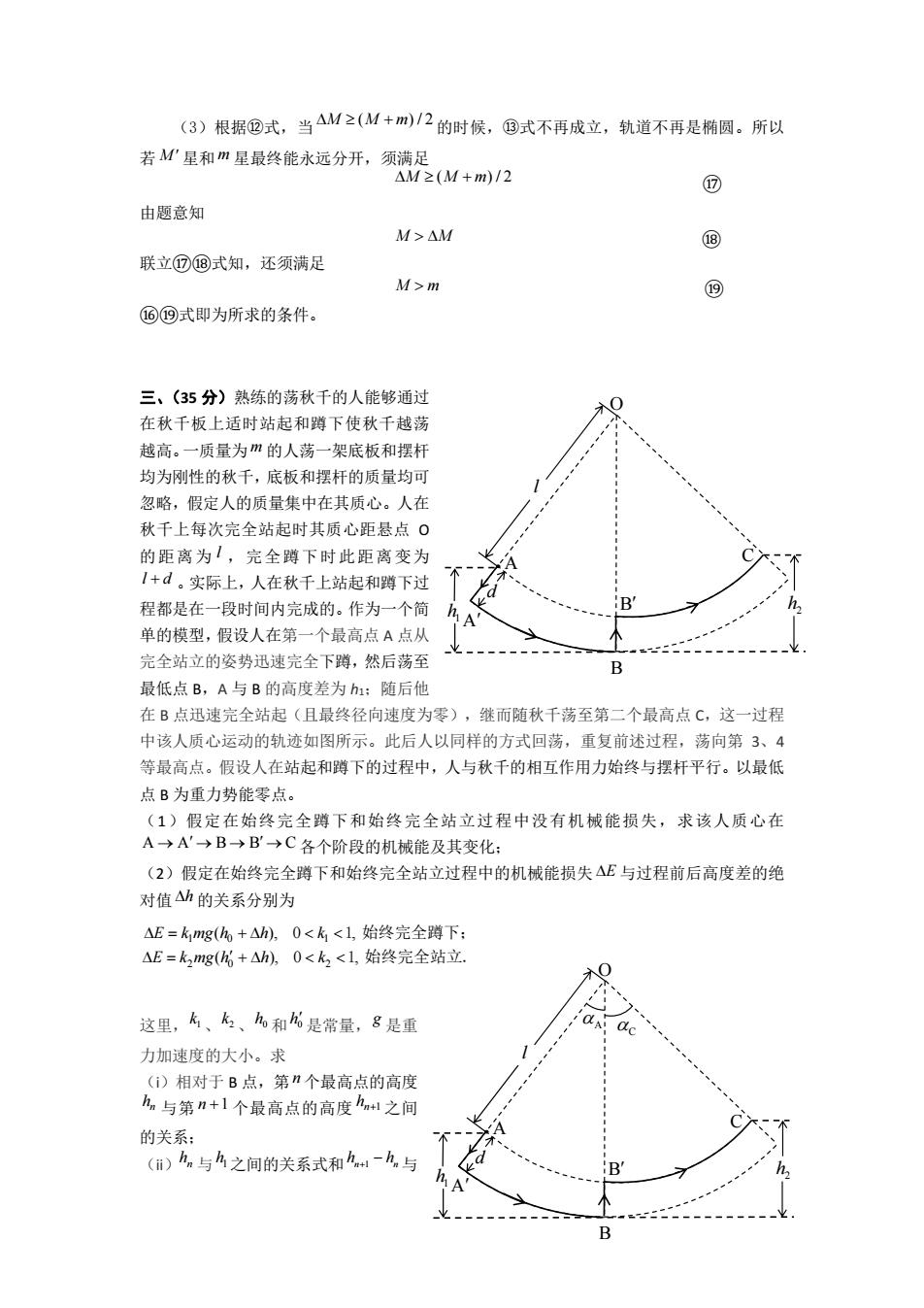
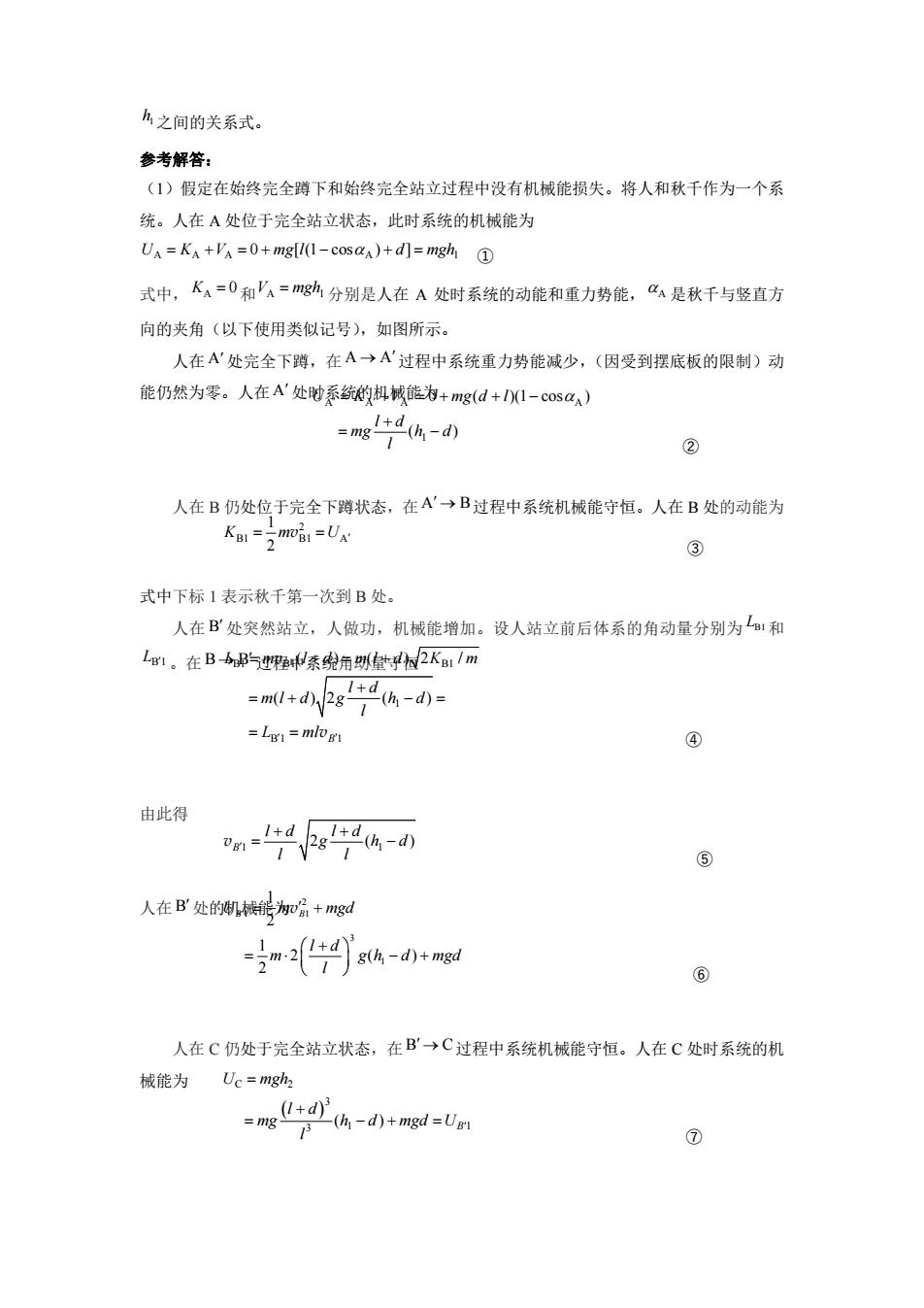
(3)根据⑫式,当 M Mm ( )/2 的时候,⑬式不再成立,轨道不再是椭圆。所以 若 M 星和m 星最终能永远分开,须满足 M Mm ( )/2 ⑰ 由题意知 M M ⑱ 联立⑰⑱式知,还须满足 M m ⑲ ⑯⑲式即为所求的条件。 三、(35 分)熟练的荡秋千的人能够通过 在秋千板上适时站起和蹲下使秋千越荡 越高。一质量为m 的人荡一架底板和摆杆 均为刚性的秋千,底板和摆杆的质量均可 忽略,假定人的质量集中在其质心。人在 秋千上每次完全站起时其质心距悬点 O 的距离为 l ,完全蹲下时此距离变为 l d 。实际上,人在秋千上站起和蹲下过 程都是在一段时间内完成的。作为一个简 单的模型,假设人在第一个最高点 A 点从 完全站立的姿势迅速完全下蹲,然后荡至 最低点 B,A 与 B 的高度差为 h1;随后他 在 B 点迅速完全站起(且最终径向速度为零),继而随秋千荡至第二个最高点 C,这一过程 中该人质心运动的轨迹如图所示。此后人以同样的方式回荡,重复前述过程,荡向第 3、4 等最高点。假设人在站起和蹲下的过程中,人与秋千的相互作用力始终与摆杆平行。以最低 点 B 为重力势能零点。 (1)假定在始终完全蹲下和始终完全站立过程中没有机械能损失,求该人质心在 AA BB C 各个阶段的机械能及其变化; (2)假定在始终完全蹲下和始终完全站立过程中的机械能损失 E 与过程前后高度差的绝 对值 h 的关系分别为 10 1 20 2 ( ), 0 , ( ), 0 , E k mg h h k E k mg h h k 1 完全 始终 蹲 1 始终 下; 完全站立. 这里, 1 k 、 2 k 、 0 h 和 0 h 是常量,g 是重 力加速度的大小。求 (i)相对于 B 点,第n 个最高点的高度 n h 与第 n 1 个最高点的高度 n 1 h 之间 的关系; (ii) n h 与 1h 之间的关系式和 n n 1 h h 与 B O A C l d 1 h A B 2 h A C B O A C l d 1 h A B 2 h
h之间的关系式。 参考解答: (1)假定在始终完全蹲下和始终完全站立过程中没有机械能损失。将人和秋千作为一个系 统。人在A处位于完全站立状态,此时系统的机械能为 UA=KA+VA =0+mg[l(1-cosaA)+d]=mgh1 式中,KA=0和'A=mgM分别是人在A处时系统的动能和重力势能,aA是秋千与竖直方 向的夹角(以下使用类似记号),如图所示。 人在A'处完全下蹲,在A→A'过程中系统重力势能减少,(因受到摆底板的限制)动 能仍然为零。人在A'处助系统的机械能为+mg(d+I)I-COS&A) =g4-d0 ② 人在B仍处位于完全下蹲状态,在A'→B过程中系统机械能守恒。人在B处的动能为 Kal=7mBI=UA ③ 式中下标1表示秋千第一次到B处。 人在B处突然站立,人做功,机械能增加。设人站立前后体系的角动量分别为1和 Lg1。在B与程素统角哪量2K11m =m0+d2h-0- L81 =mlog ④ 由此得 - ⑤ 人在B'处的械能为加日1+mgd ⑥ 人在C仍处于完全站立状态,在B'→C过程中系统机械能守恒。人在C处时系统的机 械能为 Uc=mgh, 。0+d)3 mg- (h-d)+mgd=Um ⑦
1 h 之间的关系式。 参考解答: (1)假定在始终完全蹲下和始终完全站立过程中没有机械能损失。将人和秋千作为一个系 统。人在 A 处位于完全站立状态,此时系统的机械能为 A AA A 1 U K V mg l d mgh 0 [ (1 cos ) ] ① 式中, A K 0和V mgh A 1 分别是人在 A 处时系统的动能和重力势能, A 是秋千与竖直方 向的夹角(以下使用类似记号),如图所示。 人在 A 处完全下蹲,在 A A 过程中系统重力势能减少,(因受到摆底板的限制)动 能仍然为零。人在 A 处时系统的机械能为 A AA A 1 0 ( )(1 cos ) ( ) U K V mg d l l d mg h d l ② 人在 B 仍处位于完全下蹲状态,在 A B 过程中系统机械能守恒。人在 B 处的动能为 2 B1 B1 A 1 2 K mU v ③ 式中下标 1 表示秋千第一次到 B 处。 人在 B 处突然站立,人做功,机械能增加。设人站立前后体系的角动量分别为 LB1和 LB 1 。在 B B 过程中系统角动量守恒 B1 B1 B1 1 B1 1 ( ) ( )2 / ( ) 2 ( ) B L m l d ml d K m l d ml d g h d l L ml v v ④ 由此得 1 1 2 () B ld ld g h d l l v ⑤ 人在 B处的机械能为 2 1 1 3 1 1 2 1 2 ( ) 2 U m mgd B B l d m g h d mgd l v ⑥ 人在 C 仍处于完全站立状态,在 B C 过程中系统机械能守恒。人在 C 处时系统的机 械能为 C 2 3 3 1 1 ( ) B U mgh l d mg h d mgd U l ⑦

由⑥⑦式得 -)- 于是 Uc-Ux ⑧ (2)()假定在始终完全蹲下和始终完全站立过程中有机械能损失。按题给模型,人第”次 在B处时系统的动能为2mom=mg:-k(mgh+mghg) =(1-k)mghi -k mgho =-0ms牛6.-)-kg% ⑨ 即 6=20-68-小-2 ⑨ 按题给模型,人第次在B'处时系统的动能为 2ma=mgta1-件mg6+mg(hn1-d】 =(1+k2)mg(h-d)+kmgho ⑩ 即 Vn=2(1+k2)g(hnsl-d)+2k2gho 0 在第”次B→B过程中,系统角动量守恒,有 (1+d)moBn=Imog'n ① 由⑨⑩⑩式得 2(1+k2)2g(hn+1-d)+2kz1Pg6 =20-X0+arg中-d)-2k0+a ② 由②式得 d(w0点(j 少0[* =(hn-d)-4 ③ 式中
由⑥⑦式得 3 2 1 = () l d hd hd l 于是 3 CA 1 1( ) l d U U mg h d l ⑧ (2)(i)假定在始终完全蹲下和始终完全站立过程中有机械能损失。按题给模型,人第n 次 在 B 处时系统的动能为 2 B 10 1 10 1 10 1 ( ) 2 (1 ) (1 ) ( ) nn n n n m mgh k mgh mgh k mgh k mgh l d k mg h d k mgh l v ⑨ 即 2 B 1 10 2(1 ) ( ) 2 n n l d k g h d k gh l v ⑨ 按题给模型,人第n 次在 B处时系统的动能为 2 B 1 20 1 2 1 20 1 ( ) [ ( )] 2 (1 ) ( ) nn n n m mg h d k mgh mg h d k mg h d k mgh v ⑩ 即 2 B 2 1 20 2(1 ) ( ) 2 n n k g h d k gh v ⑩ 在第n 次 B B 过程中,系统角动量守恒,有 B B ( ) n n l d m lm v v ⑪ 由⑨⑩⑪式得 2 2 2 1 20 2 2 1 10 2(1 ) ( ) 2 2(1 )( ) ( ) 2 ( ) n n k l g h d k l gh l d k l d g h d k l d gh l ⑫ 由⑫式得 3 2 1 12 1 00 2 22 3 2 1 12 0 0 2 22 1 ( ) 1 11 1 ( ) 1 11 ( ) n n n n k ld k ld k h d hd h h kl kl k k ld k ld k hd h h kl kl k h d ⑬ 式中