
先进控制理论与控制工程 中国地质大学自动化学院吴敏 School of Aut 实例1一基于一维方法 设计问题: 对于给定的改进型重复控制系统,在系统鲁棒稳定的前提下,寻找低通滤波器的最大剪切频 率⊙。,使系统具有最高的稳态跟踪精度 控制对象: ,()=A,x(0+B,4(0 y0)=Cx,() 不确定性: Ap=Ap0+AA,(t),B。=Bp0+△B,(t) [AA,0△B,()]=Φ,r)[ΨAΨ] ΓT(t)r(t)≤I,t≥0 系统结构设计: 引入状态反馈控制增益K。,K。,提高系统鲁棒稳定性,改善系统暂态性能 113 2021年9月13日
113 2021年9月13日 设计问题: 对于给定的改进型重复控制系统,在系统鲁棒稳定的前提下,寻找低通滤波器的最大剪切频 率 wc ,使系统具有最高的稳态跟踪精度 控制对象: ( ) ( ) ( ) ( ) ( ) p p p p p p x t A x t B u t y t C x t 不确定性: 0 0 T ( ), ( ) ( ) ( ) ( ) ( ) ( ) 0 p p p p p p p p p A B A A A t B B B t A t B t t t t I t D D D D , 系统结构设计: 引入状态反馈控制增益 K K e p , ,提高系统鲁棒稳定性,改善系统暂态性能 实例1—基于一维方法 先进控制理论与控制工程 吴 敏
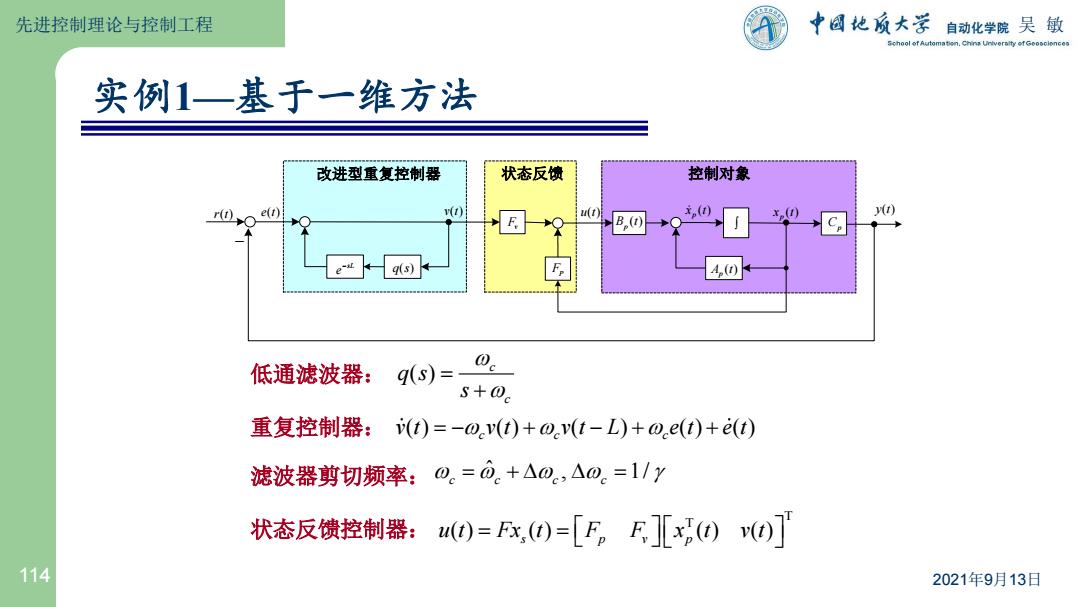
先进控制理论与控制工程 中国地质大学自动化学院吴敏 实例1一基于一维方法 改进型重复控制器 状态反馈 控制对象 (t) (t) ) e q(s) 4,0 低通滤波器: 9s)=_0 s+@c 重复控制器:(t)=-o.v(t)+o.v(t-L)+o,e(t)+E(t) 滤波器剪切频率:0。=0.+△0。,△0。=1/y 状态反馈控制器:)=x,)=[F。F][x0)v)] 114 2021年9月13日
114 2021年9月13日 ( ) ( ) ( ) ( ) ( ) c c c 重复控制器: v t v t v t L e t e t - - w w w 状态反馈控制器: T T ( ) ( ) ( ) ( ) s p v p u t Fx t F F x t v t ˆ , 1/ 滤波器剪切频率: w w w w c c c c D D vt() sL e - F v () p rt() x t p () x t yt() FP ut() Cp () A t p et() - 改进型重复控制器 控制对象 () B t p qs() 状态反馈 ( ) c c q s s w w 低通滤波器: 实例1—基于一维方法 先进控制理论与控制工程 吴 敏
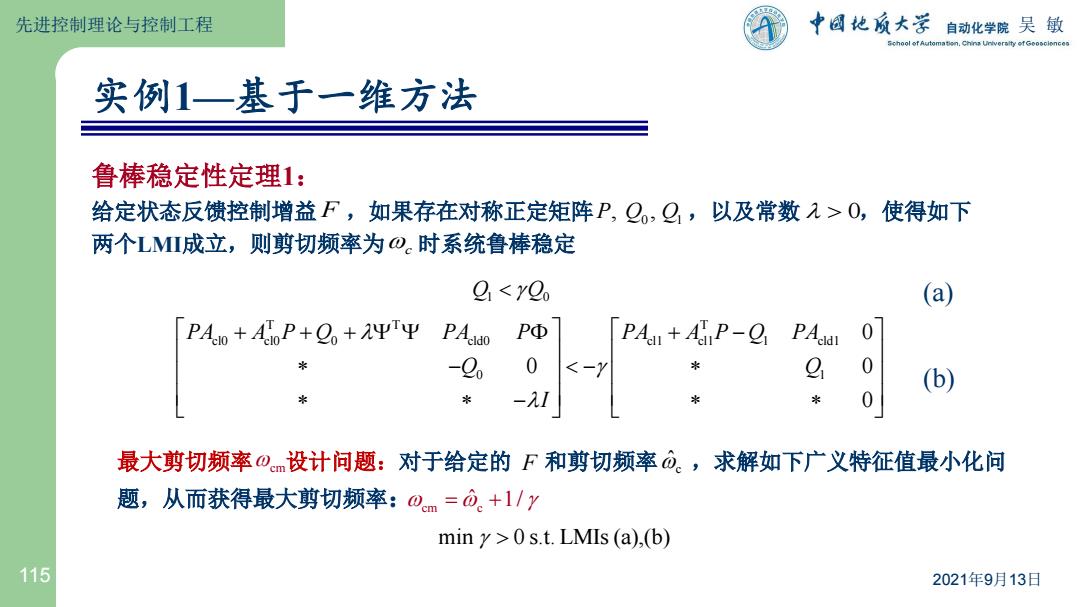
先进控制理论与控制工程 中圆记质大学自动化学院吴敏 School of Aut 实例1一基于一维方法 鲁棒稳定性定理1: 给定状态反馈控制增益F,如果存在对称正定矩阵P,Q,9,以及常数入>0, 使得如下 两个LMⅡ成立,则剪切频率为⊙。时系统鲁棒稳定 e<YCo (a) PAo+AP+Q+2ΨT平PAao PΦ PAcu Ac P-PAcld 0 -0 0 -AI 0 (b) 最大剪切频率®m设计问题:对于给定的F和剪切频率o。,求解如下广义特征值最小化问 题,从而获得最大剪切频率:om=o。+1/y min y>0s.t.LMIs (a),(b) 115 2021年9月13日
115 2021年9月13日 鲁棒稳定性定理1: 给定状态反馈控制增益 ,如果存在对称正定矩阵 ,以及常数 ,使得如下 两个LMI成立,则剪切频率为 时系统鲁棒稳定 0 1 F P Q Q , , 0 wc Q Q 1 0 T T T cl0 cl0 0 cld0 cl1 cl1 1 cld1 0 1 0 0 0 0 PA A P Q PA P PA A P Q PA Q Q I - - - - min 0 s.t. LMIs (a),(b) (a) (b) 最大剪切频率 设计问题:对于给定的 和剪切频率 ,求解如下广义特征值最小化问 题,从而获得最大剪切频率: wcm c w ˆ cm c w w ˆ 1/F 实例1—基于一维方法 先进控制理论与控制工程 吴 敏
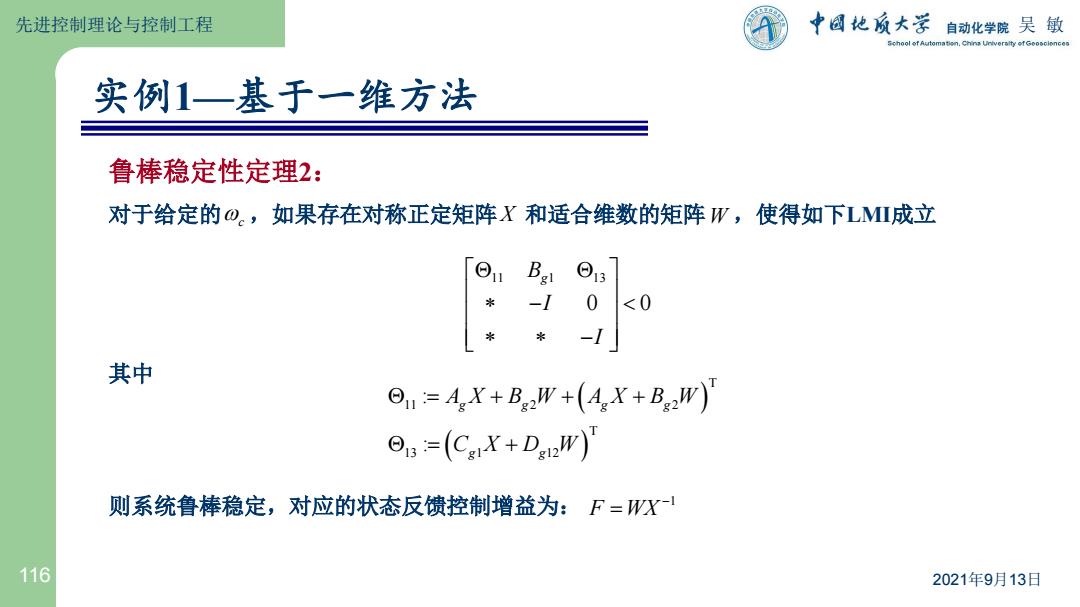
先进控制理论与控制工程 中圆记质大学自动化学院吴敏 School of Aut 实例1一基于一维方法 鲁棒稳定性定理2: 对于给定的O。,如果存在对称正定矩阵X和适合维数的矩阵W,使得如下LMⅡ成立 ⊙11 ⊙13 -1 0 <0 -1 其中 O1=AX+Bg2W+(AX+BW)) O3=(CX+DgW) 则系统鲁棒稳定,对应的状态反馈控制增益为:F=WX 116 2021年9月13日
116 2021年9月13日 11 1 13 0 0 B g I I - - 则系统鲁棒稳定,对应的状态反馈控制增益为: 1 F WX - T 11 2 2 T 13 1 12 : : g g g g g g A X B W A X B W C X D W 其中 鲁棒稳定性定理2: 对于给定的 wc ,如果存在对称正定矩阵 X 和适合维数的矩阵 W ,使得如下LMI成立 实例1—基于一维方法 先进控制理论与控制工程 吴 敏
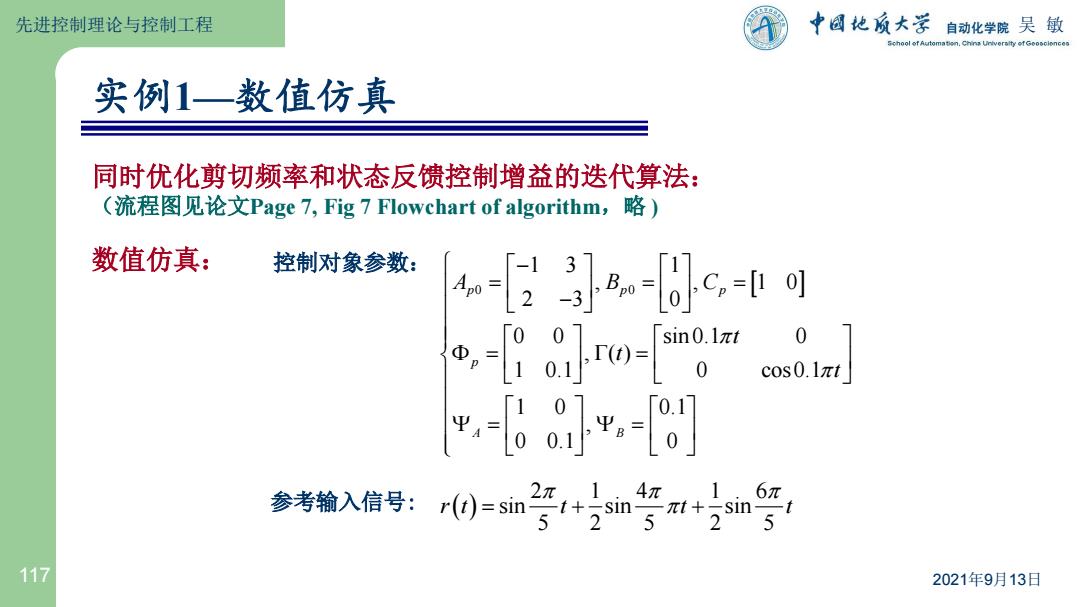
先进控制理论与控制工程 中圆记质大学自动化学院吴敏 实例1一数值仿真 同时优化剪切频率和状态反馈控制增益的迭代算法: (流程图见论文Page7,Fig7 Flowchart of algorithm,略) 数值仿真: 控制对象参数: 「-1 A0\2 -c, 0 fro-t o sin0.lπt 0 cos0.1πt 1 0.1 世房 2π,.1.4π.1.6π 参考输入信号:r)=sin51+2sint+2n5 t 117 2021年9月13日
117 2021年9月13日 同时优化剪切频率和状态反馈控制增益的迭代算法: (流程图见论文Page 7, Fig 7 Flowchart of algorithm,略 ) 数值仿真: 控制对象参数: 0 0 1 3 1 , , 1 0 2 3 0 0 0 sin 0.1 0 , ( ) 1 0.1 0 cos0.1 1 0 0.1 , 0 0.1 0 p p p p A B A B C t t t - - 参考输入信号: 2 1 4 1 6 sin sin sin 5 2 5 2 5 r t t t t 实例1—数值仿真 先进控制理论与控制工程 吴 敏