
先进控制理论与控制工程 中圆记质大学自动化学院吴敏 重复控制的二维模型(1) >出发点: 考虑到重复控制过程中存在两种完全不同的行为: ,一个周期之内的连续控制行为 各个周期之间的离散学习行为 基于连续/离散二维空间的重复控制方法 >基本思想: 把一个周期内的连续控制行为和各个周期之间的离散学习行为分开来考虑,独立地考 虑和设计重复控制系统的控制与学习过程 108 2021年9月13日
108 2021年9月13日 出发点: 考虑到重复控制过程中存在两种完全不同的行为: 一个周期之内的连续控制行为 各个周期之间的离散学习行为 基于连续/离散二维空间的重复控制方法 基本思想: 把一个周期内的连续控制行为和各个周期之间的离散学习行为分开来考虑,独立地考 虑和设计重复控制系统的控制与学习过程 重复控制的二维模型(1) 先进控制理论与控制工程 吴 敏
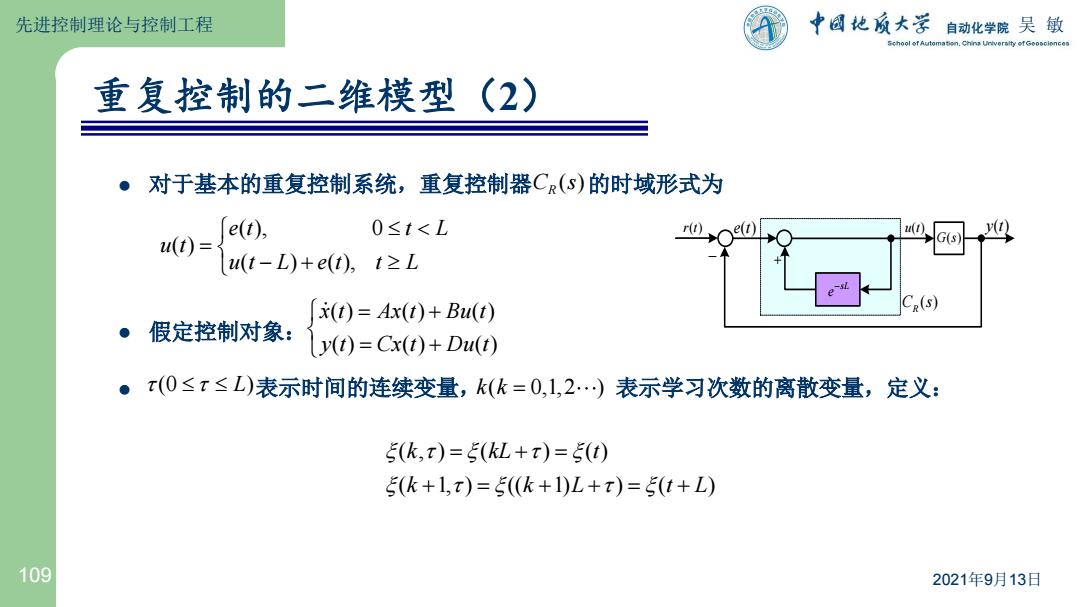
先进控制理论与控制工程 中圆枕质大学自动化学院吴敏 School of Aut 重复控制的二维模型(2) ●对于基本的重复控制系统,重复控制器C(S)的时域形式为 e(t), 0≤t<L r(t). u(t)= u(t-L)+e(t),t≥L (t)=Ax(t)+Bu(t) Cx(s) ●假定控制对象: y(t)=Cx(t)+Du(t) ●t(0≤t≤L)表示时间的连续变量,k(k=0,1,2…)表示学习次数的离散变量,定义: 5(k,t)=5(kL+t)=(t) 5(k+1,t)=(k+1)L+t)=(t+L) 109 2021年9月13日
109 2021年9月13日 重复控制的二维模型(2) 对于基本的重复控制系统,重复控制器 的时域形式为 假定控制对象: 表示时间的连续变量, 表示学习次数的离散变量,定义: ( ) ( ) ( ) ( ) ( ) ( ) x t Ax t Bu t y t Cx t Du t ( ) C s R ( ), 0 ( ) ( ) ( ), e t t L u t u t L e t t L - (0 ) L k k( 0,1,2 ) ( , ) ( ) ( ) ( 1, ) (( 1) ) ( ) k kL t k k L t L rt() e(t) ut() y(t) ( ) C s R Gs( ) - sL e - 先进控制理论与控制工程 吴 敏
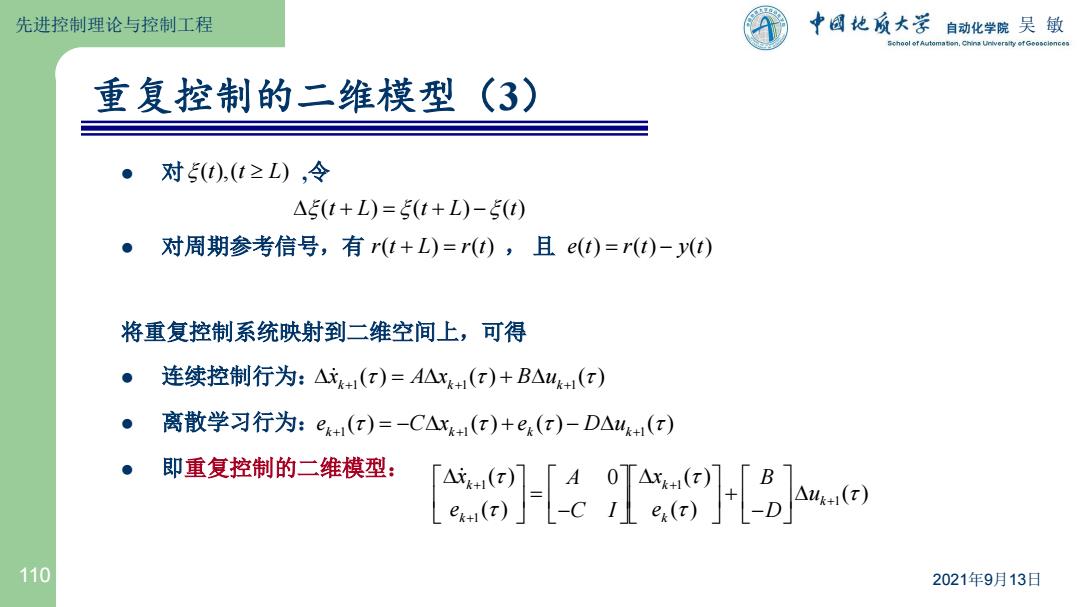
先进控制理论与控制工程 中圆记质大学自动化学院吴敏 重复控制的二维模型(3) 对5),(t≥L),令 △5(t+L)=(t+L)-5(t) ●对周期参考信号,有r(t+L)=r(t),且e(t)=r(t)-y(t) 将重复控制系统映射到二维空间上,可得 连续控制行为:△4(t)=A△x+(T)+B△41(t) 离散学习行为:e1(t)=-C△x+(r)+e(r)-D△山k1(t) 即重复控制的二维模型: [8-[←Tg]-[an 110 2021年9月13日
110 2021年9月13日 重复控制的二维模型(3) 对 ,令 对周期参考信号,有 , 且 将重复控制系统映射到二维空间上,可得 连续控制行为: 离散学习行为: 即重复控制的二维模型: ( ),( ) t t L D - ( ) ( ) ( ) t L t L t e t r t y t ( ) ( ) ( ) - 1 1 1 ( ) ( ) ( ) k k k x A x B u D D D 1 1 1 ( ) ( ) ( ) ( ) k k k k e C x e D u - D - D 1 1 1 1 ( ) ( ) 0 ( ) ( ) ( ) k k k k k x x A B u e e C I D D D D - - r t L r t ( ) ( ) 先进控制理论与控制工程 吴 敏
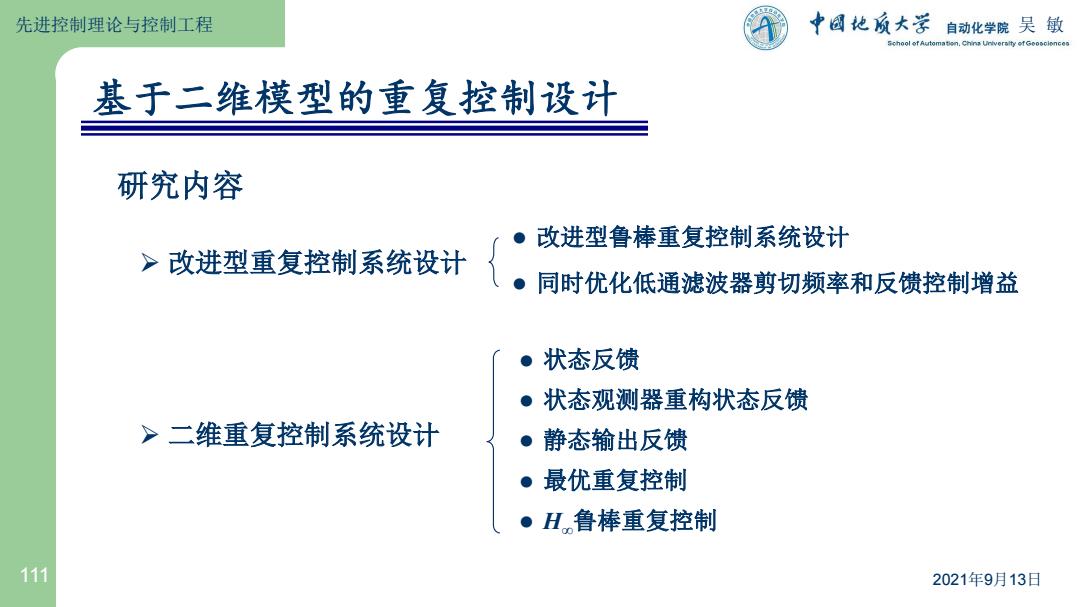
先进控制理论与控制工程 中圆记质大学自动化学院吴敏 School of Aut 基于二维模型的重复控制设计 研究内容 ● 改进型鲁棒重复控制系统设计 >改进型重复控制系统设计 同时优化低通滤波器剪切频率和反馈控制增益 ●状态反馈 ·状态观测器重构状态反馈 >二维重复控制系统设计 ●静态输出反馈 ●最优重复控制 ●H鲁棒重复控制 111 2021年9月13日
111 2021年9月13日 研究内容 改进型重复控制系统设计 二维重复控制系统设计 改进型鲁棒重复控制系统设计 同时优化低通滤波器剪切频率和反馈控制增益 基于二维模型的重复控制设计 状态反馈 状态观测器重构状态反馈 静态输出反馈 最优重复控制 H∞鲁棒重复控制 先进控制理论与控制工程 吴 敏
先进控制理论与控制工程 中固地质大学 自动化学院吴敏 典型的重复控制系统设计 1.基于低通滤波器和反馈控制器同时优化的鲁棒重复控制系统设计 (Jinhua She,Min Wu,Yonghong Lan,and Yong He.IET Control Theory and Applications,2010,4(8):1366-1376) 2.基于状态观测器的H鲁棒重复控制系统设计 (Min Wu,Lan Zhou,and Jinhua She.IEEE Transactions on Automatic Control,2011,56(6):1452~1457) 3.基于连续/离散二维模型的改进型重复控制系统设计 (Jinhua She,Lan Zhou,Min Wu,and Jie Zhang.Automatica,2012,48 (5):844-850) 4.鲁棒改进型重复控制系统设计 (Lan Zhou,Jinhua She,Min Wu,and Jie Zhang.ASME.Journal of Dynamic Systems,Measurement,and Control,2012, 134(4):011023-1-7 (Min Wu,Bao-Gang Xu,Wei-Hua Cao,Jin-Hua She.IEEE Transactions on Control Systems Technology,2014,22(3): 1044-1051) 112 2021年9月13日
112 2021年9月13日 典型的重复控制系统设计 1. 基于低通滤波器和反馈控制器同时优化的鲁棒重复控制系统设计 (Jinhua She, Min Wu, Yonghong Lan, and Yong He. IET Control Theory and Applications, 2010, 4 (8): 1366-1376) 2. 基于状态观测器的H∞鲁棒重复控制系统设计 (Min Wu, Lan Zhou, and Jinhua She. IEEE Transactions on Automatic Control, 2011, 56 (6): 1452~1457) 3. 基于连续/离散二维模型的改进型重复控制系统设计 (Jinhua She, Lan Zhou, Min Wu, and Jie Zhang. Automatica, 2012, 48 (5): 844–850) 4. 鲁棒改进型重复控制系统设计 (Lan Zhou, Jinhua She, Min Wu, and Jie Zhang. ASME. Journal of Dynamic Systems, Measurement, and Control, 2012, 134 (4): 011023-1 –7) (Min Wu, Bao-Gang Xu, Wei-Hua Cao, Jin-Hua She. IEEE Transactions on Control Systems Technology, 2014, 22(3): 1044-1051) 先进控制理论与控制工程 吴 敏