
第二章机电传动系统的动力学基础 √机电传动系统的运动方程式 √多轴传动系统中负载转矩、转动惯量和飞轮转矩的折算 √典型生产机械的负载特性 √机电传动系统稳定运行的条件 √机电传动系统的过渡过程

章节内容 2.1单轴拖动系统的运动方程式 2.2多轴拖动系统的简化 2.3生产机械的机械特性 2.4机电系统稳定运行的条件 2.4机电传动系统的过渡过程(自学)

2.1单轴拖动系统的运动方程式 一、单轴拖动系统的组成 电动机 电动机的驱动对象 九 +n 连接件 系统结构图 转距方向 电动机M通过连接件直接与生产机械相连,由电动机M产生输 出转矩TM,用来克服负载转矩TL,带动生产机械以角速度ω(或 速度n)进行运动
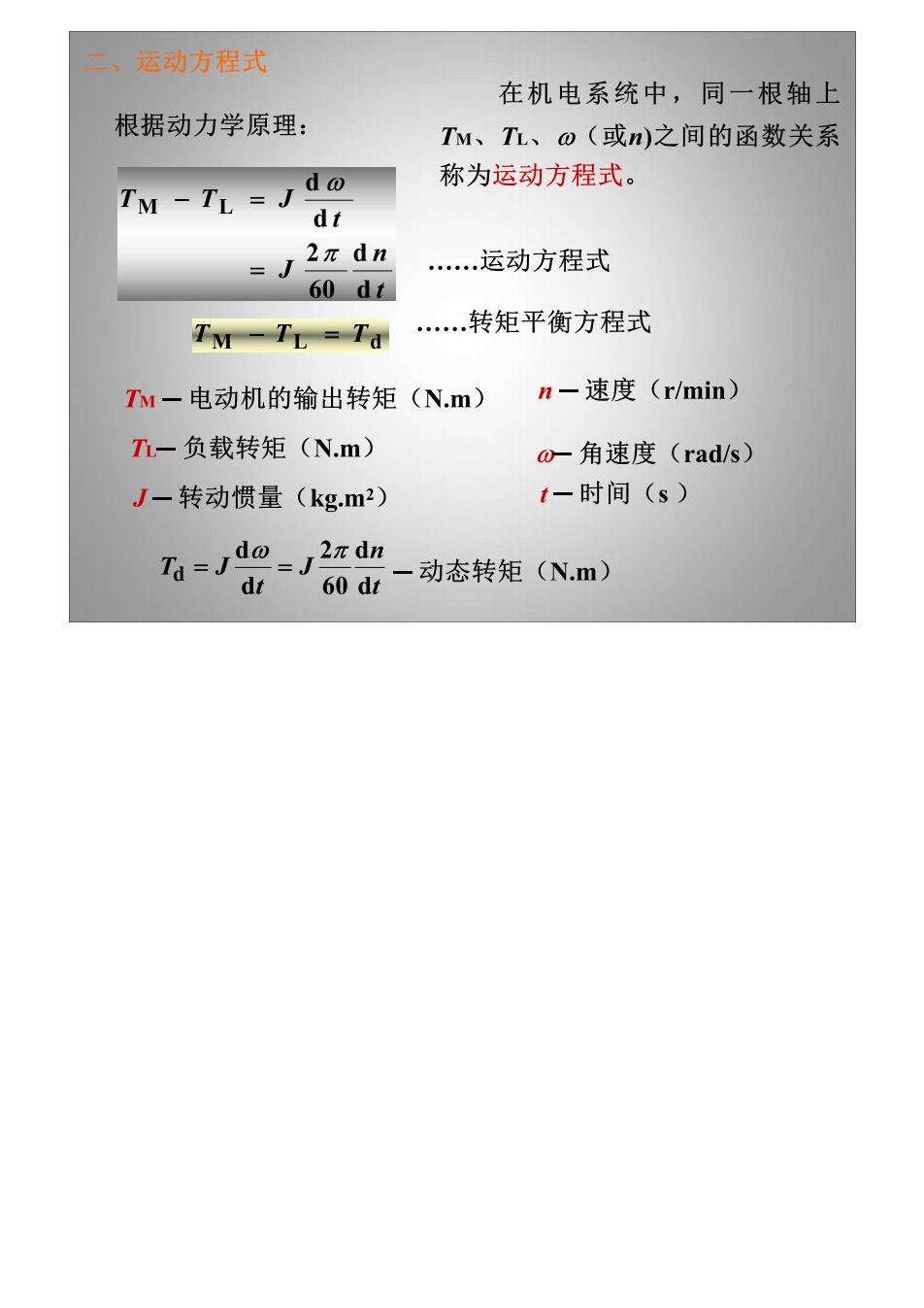
运动方程式 在机电系统中,同一根轴上 根据动力学原理: Tm、TL、o(或n)之间的函数关系 TM -TL=Jdo 称为运动方程式。 =J2πdn 运动方程式 60 dt Ty -Tt Ta 转矩平衡方程式 TM一电动机的输出转矩(Nm) n一速度(rmin) -负载转矩(N.m) o-角速度(rad/s) J-转动惯量(kg.m2) t一时间(s) a=o=2红d dt 60d-动态转矩(N.m)
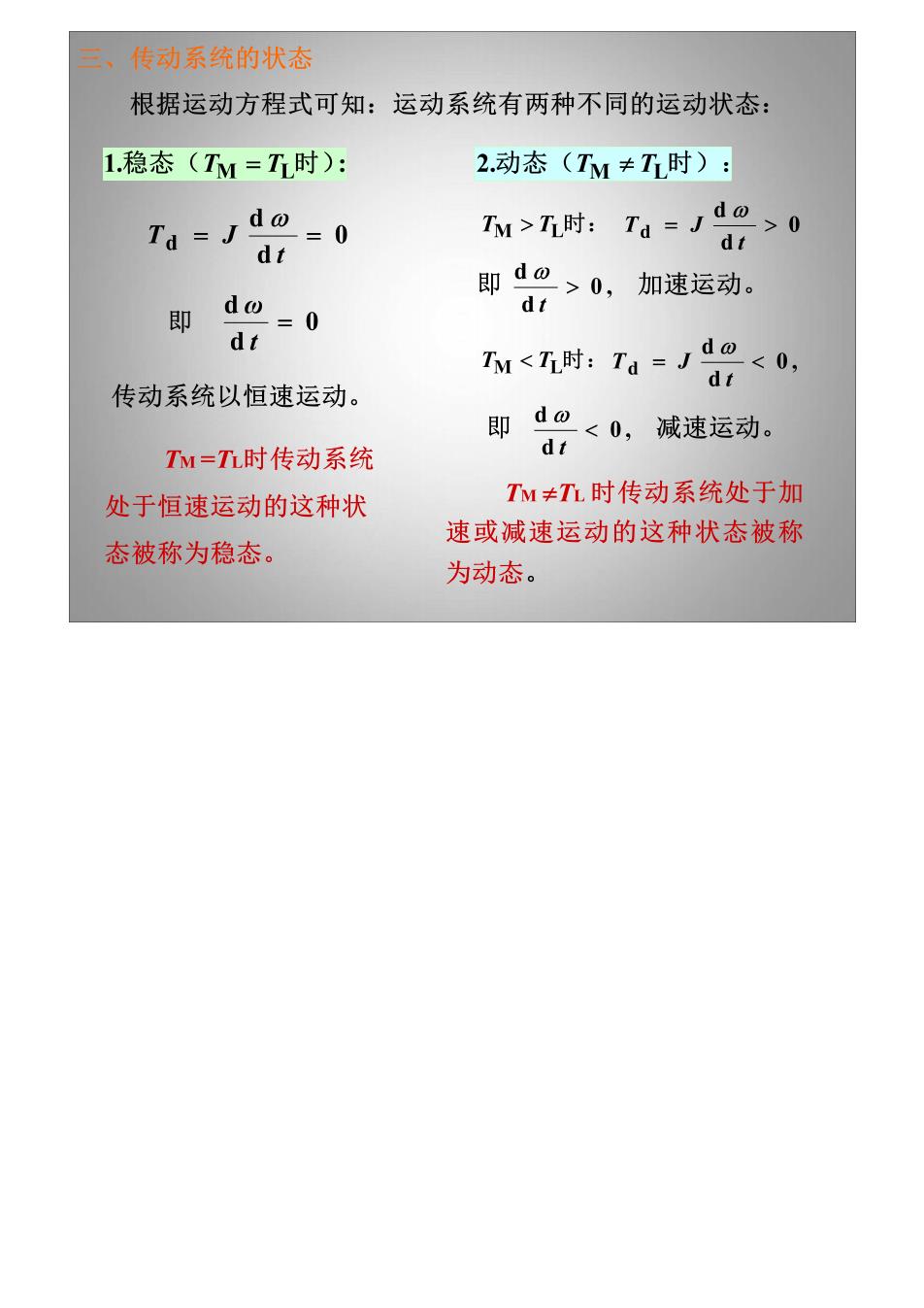
,传动系统的状态 根据运动方程式可知:运动系统有两种不同的运动状态: 1稳态(TM=T时): 2.动态(TM≠时): =0=0 >时:a=Jde >0 =0 即d。>0,加速运动。 即 d1 dt 1<时:7-J0, 传动系统以恒速运动。 TM=T时传动系统 即<0,诚速运动。 处于恒速运动的这种状 TM≠TL时传动系统处于加 速或减速运动的这种状态被称 态被称为稳态。 为动态