第五章控制电动机 5.1步进电动机 5.2直流伺服电动机 5.3交流伺服电动机 5.4力矩电动机 5.4直线电动机
5.1步进电动机 是一种将电脉冲信号转换成机械位移的机电执行元件。 角位移 输入脉冲个数 定子绕组电流变花和频 运行速度 输入脉冲频率 率的关系 步进电动机的分类: 反应式 快速 工作原理 输出转 永磁式 矩大小 混合式 功率 励磁相数 二、三、四、五、六、八相等
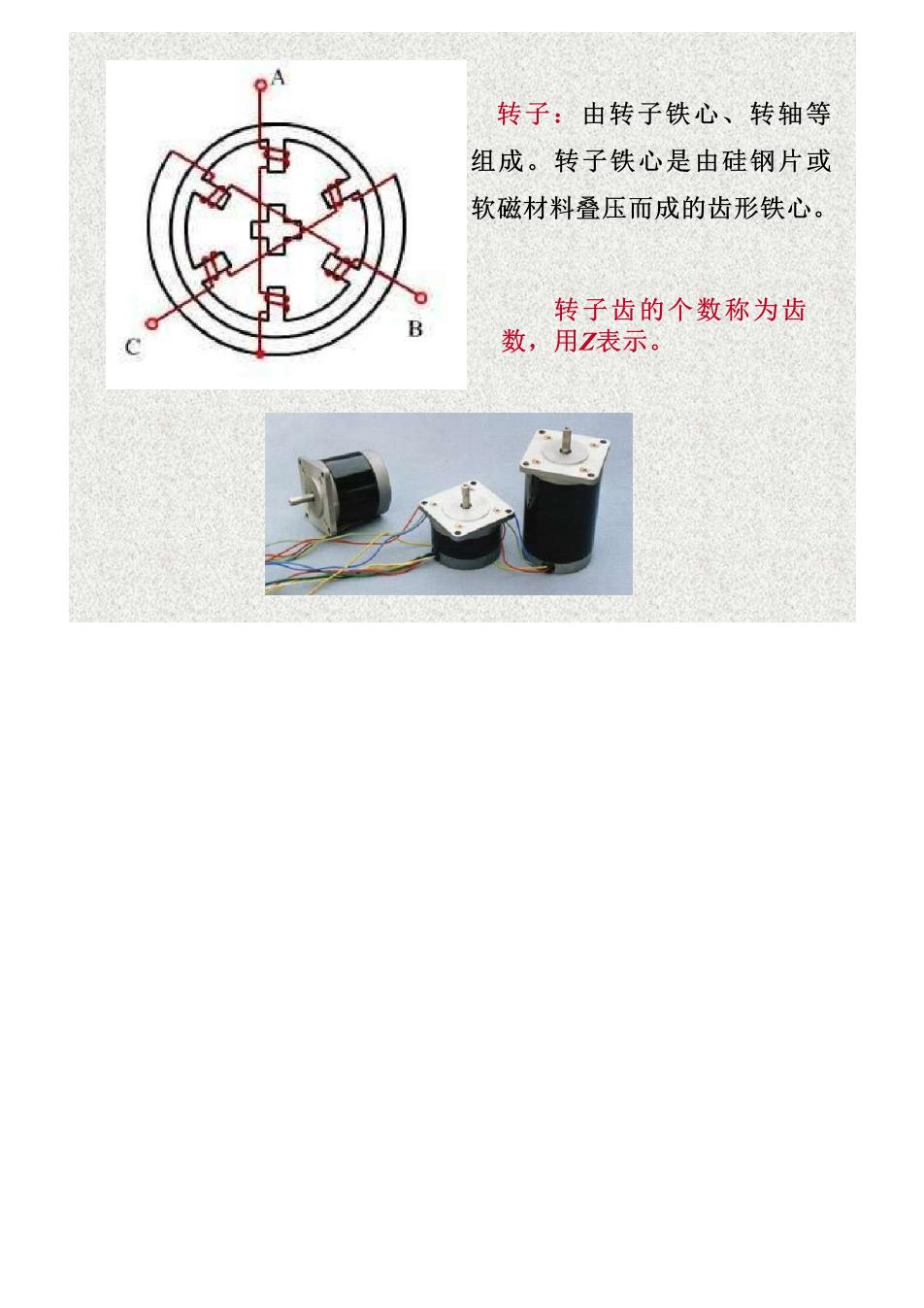
转子:由转子铁心、转轴等 组成。转子铁心是由硅钢片或 软磁材料叠压而成的齿形铁心。 转子齿的个数称为齿 数,用Z表示
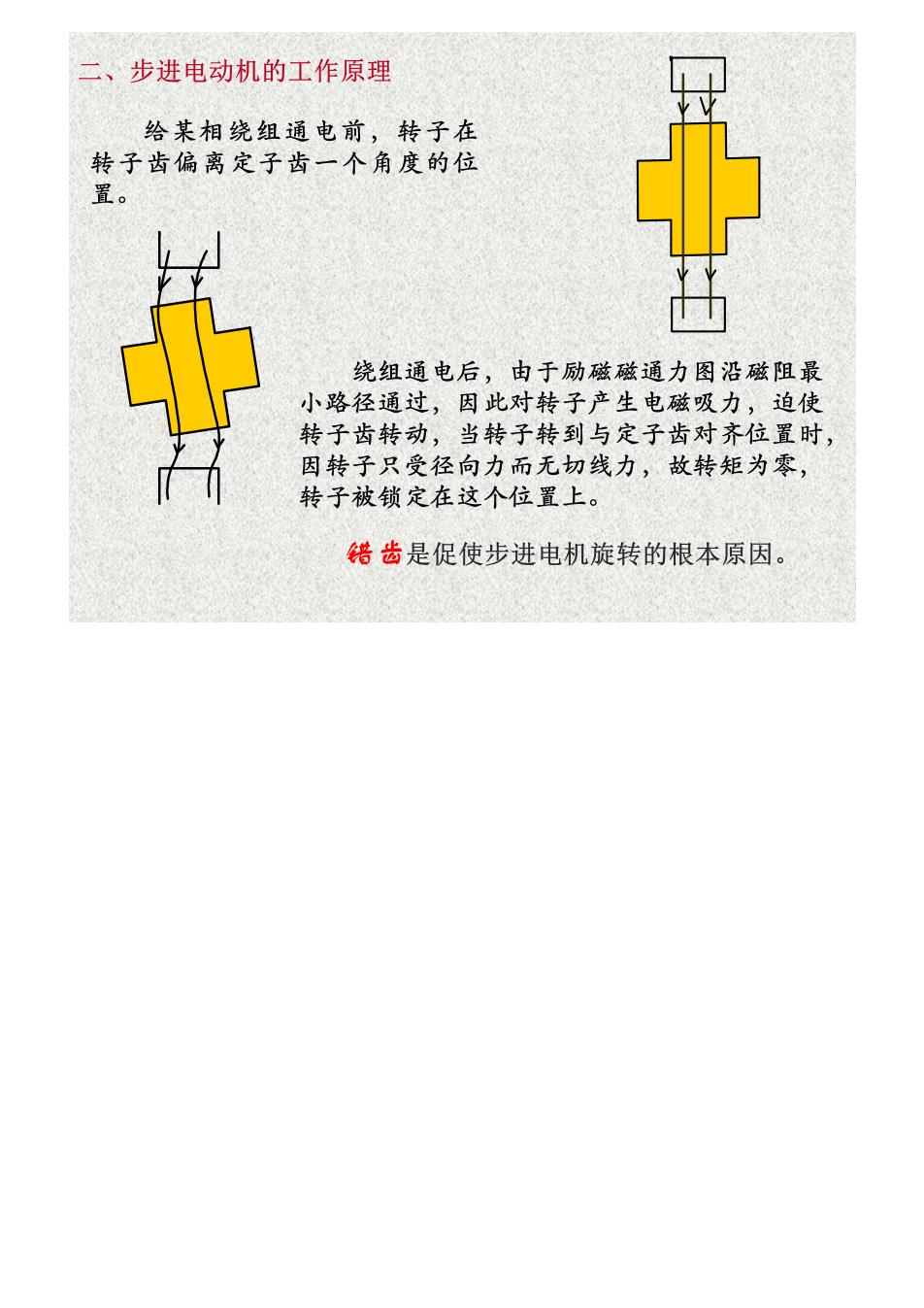
二、步进电动机的工作原理 给某相绕组通电前,转子在 转子齿偏离定子齿一个角度的位 置。 绕组通电后,由于励磁磁通力图沿磁阻最 小路径通过,因此对转子产生电磁吸力,迫使 转子齿转动,当转子转到与定子齿对齐位置时 因转子只受径向力而无切线力,故转矩为零, 转子被锁定在这个位置上。 储齿是促使步进电机旋转的根本原因
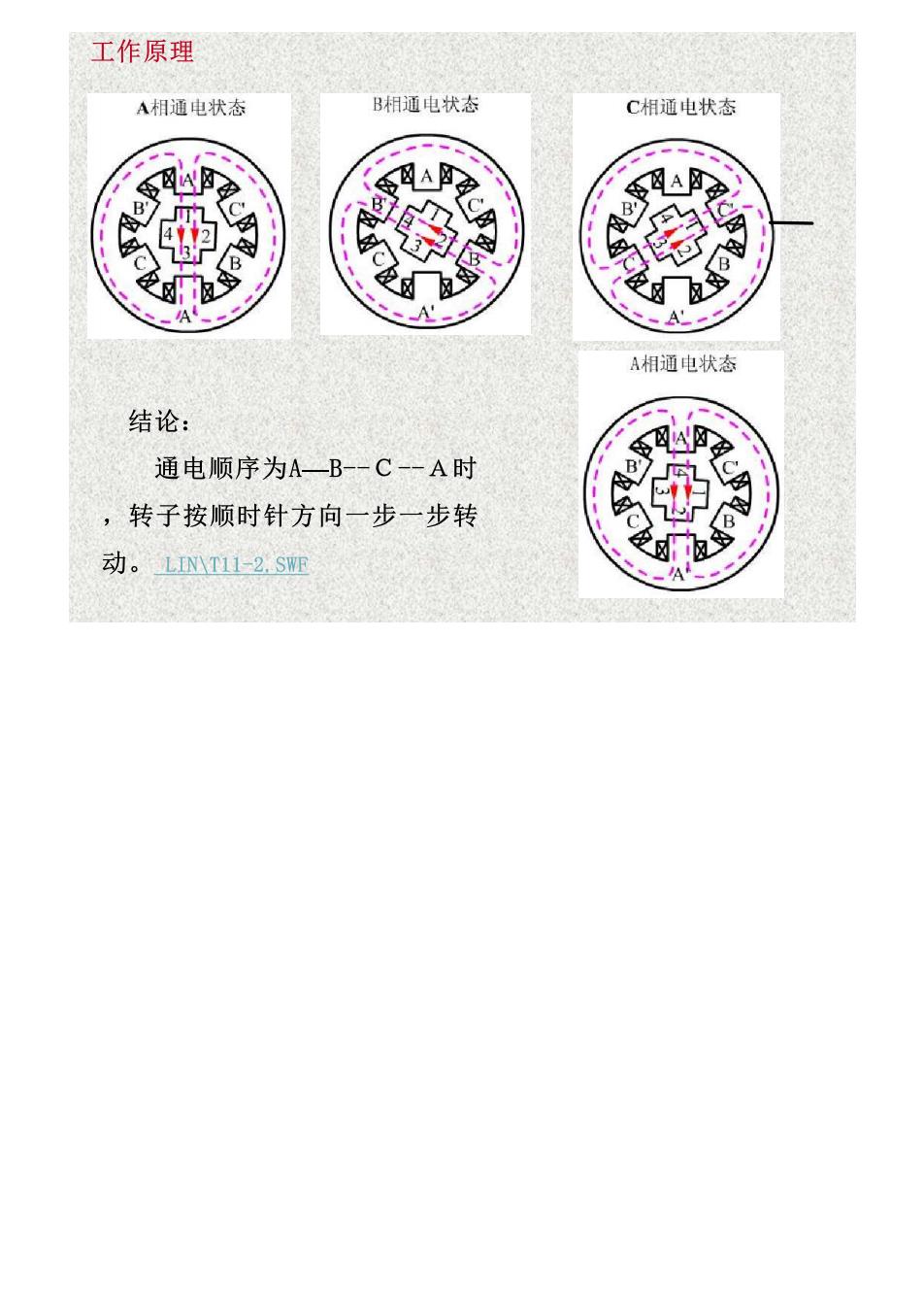
工作原理 A相通电状态 B相通电状态 C相通电状态 A相通电状态 结论: 通电顺序为A一B--C--A时 转子按顺时针方向一步一步转 动。LNT11-2.SW阻