
四,T,T、n的参考方向 因为电动机和生产机械以共同的转速旋转,所以,一般以® (或n)的转动方向为参考来确定转矩的正负。 拖动转距促进运动;制动转距阻碍运动。 1.T的符号与性质 cn) 当T的实际作用方向与n的 方向相同时,取与n相同的符号; 当T的实际作用方向与n的 +T1 方向相反时,取与n相反的符号; TM -TL=Jdo 当T的实际作用方向与n的 方向相同(符号相同)时,T =J2πdn 60 dt 为拖动转距,否则为制动转距

四,T,T、n的参考方向 因为电动机和生产机械以共同的转速旋转,所以,一般以ω (或)的转动方向为参考来确定转矩的正负。 拖动转距促进运动;制动转距阻碍运动。 2.T的符号与性质 当T的实际作用方向与n的方向 相同时,取与n相反的符号; 当T的实际作用方向与n的方向 相反时,取与n相同的符号; TM-Ti =Jdo 当T的实际作用方向与n的方 向相同(符号相反)时,T为拖 =J2 dn 60 dz 动转距,否则为制动转距
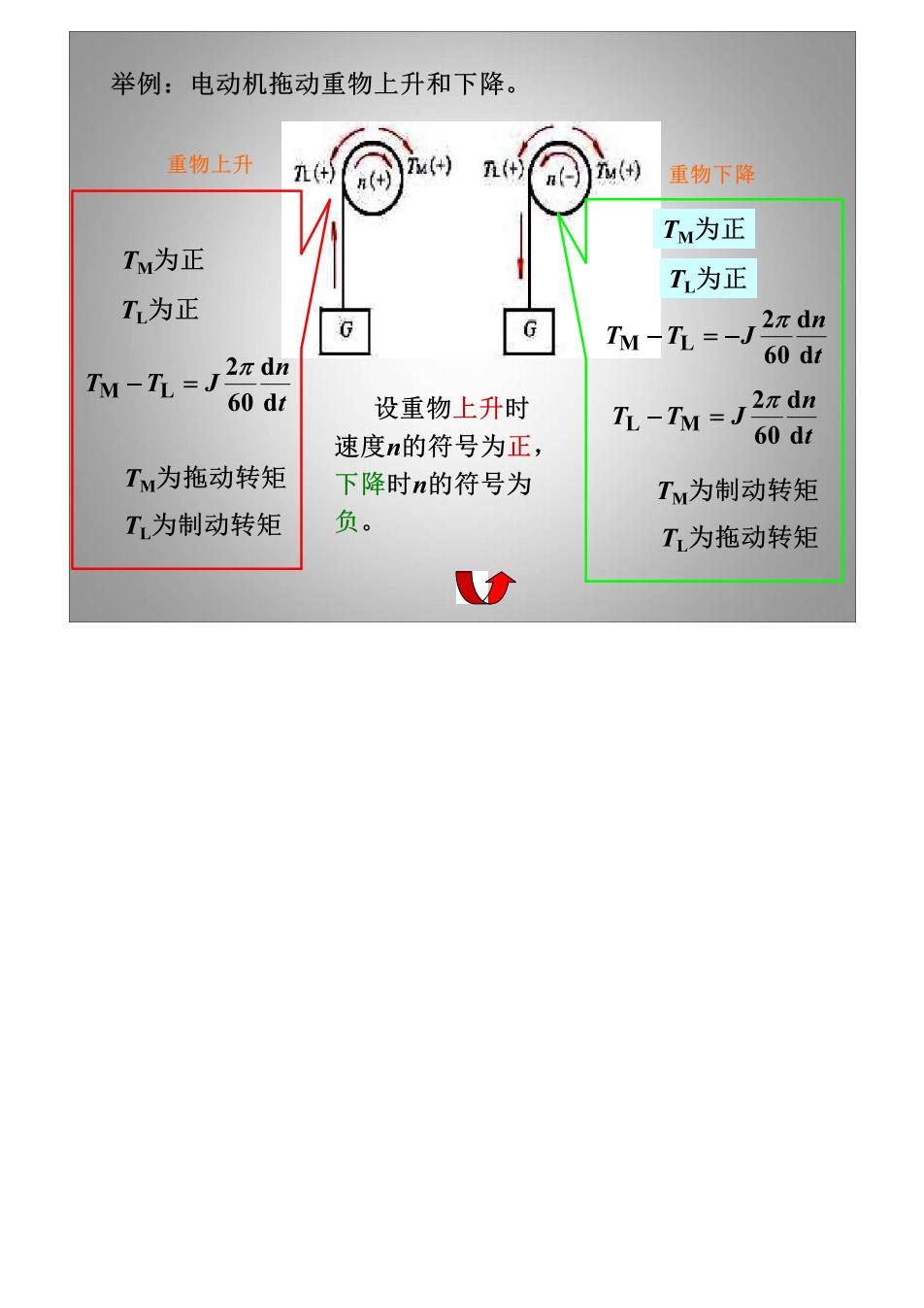
举例:电动机拖动重物上升和下降。 重物上升 重物下降 TM为正 TM为正 T为正 T为正 TM-T =-J2z dn TM-T=J2z dn 60 dz 60 dz 设重物上升时 TL-In =J2z dn 速度n的符号为正, 60 dz TM为拖动转矩 下降时n的符号为 TM为制动转矩 T为制动转矩 负。 T为拖动转矩