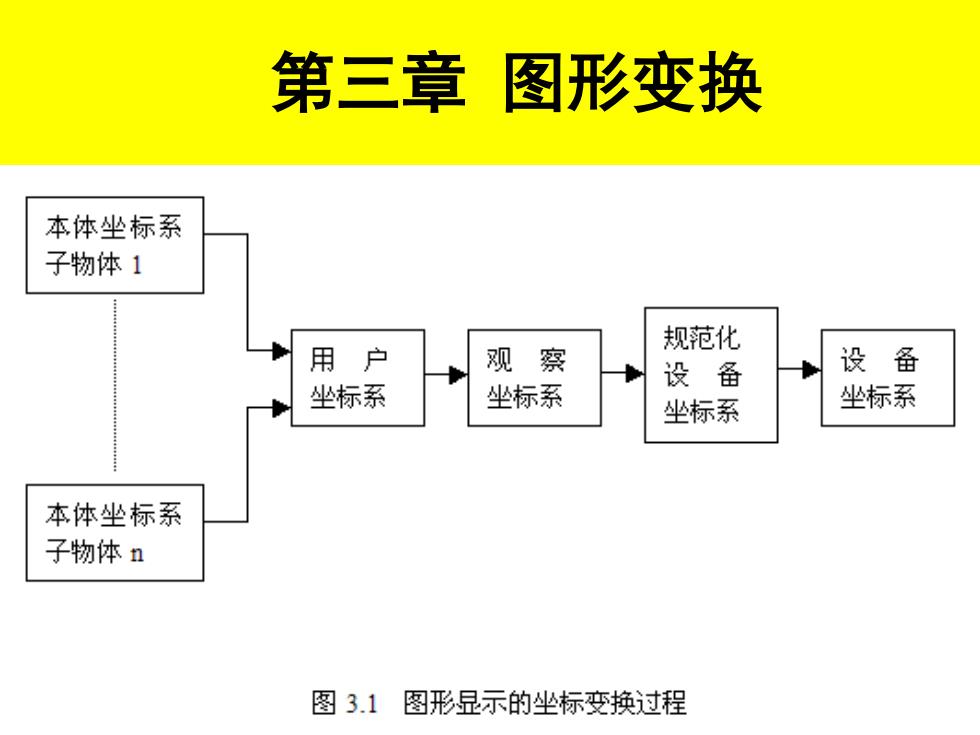
第三章图形变换 本体坐标系 子物体1 规范化 用户 观察 设备 设备 坐标系 坐标系 坐标系 坐标系 本体坐标系 子物体n 图3.1图形显示的坐标变换过程
第三章 图形变换

X KZ (1)右手系 (2)左手系 图3.2左手系和右手系
右手系 左手系
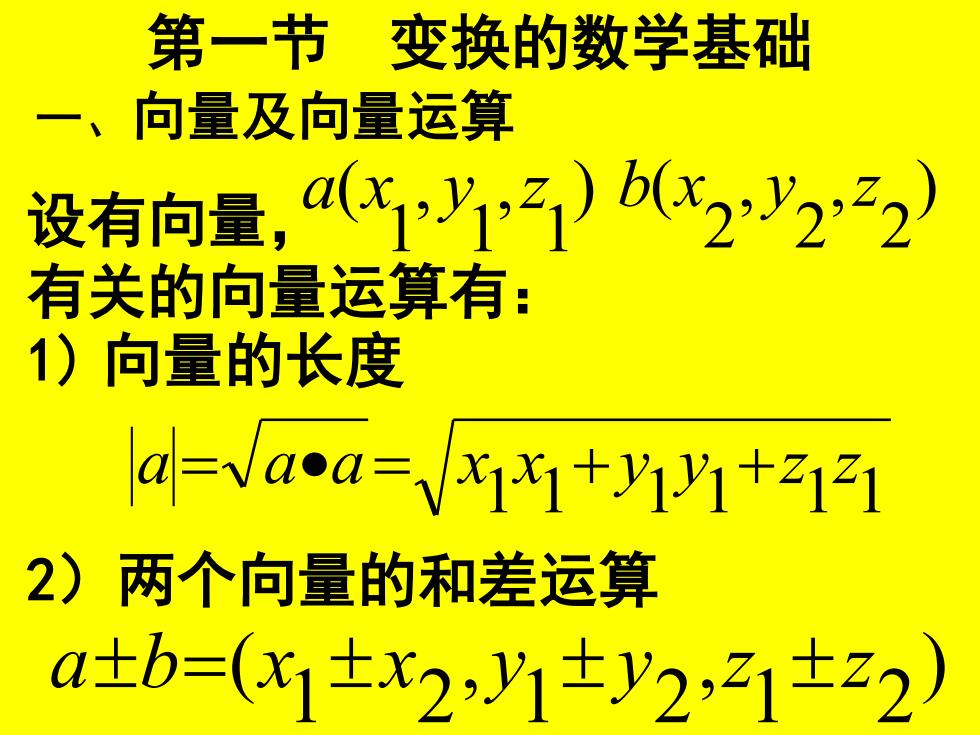
第一节变换的数学基础 一、向量及向量运算 设有向量,(¥11)bx2222 有关的向量运算有: )向量的长度 a=vasa=yxx+X1Y1+312] 2)两个向量的和差运算 M士b=(x1±x2y1±y2Z1±z2
第一节 变换的数学基础 一、向量及向量运算 设有向量, 有关的向量运算有: 1) 向量的长度 2)两个向量的和差运算 ) 1 , 1 , 1 a(x y z ) 2 , 2 , 2 b(x y z 1 1 1 1 1 1 a = a•a= x x +y y +z z ) 1 2 , 1 2 , 1 2 ab=(x x y y z z
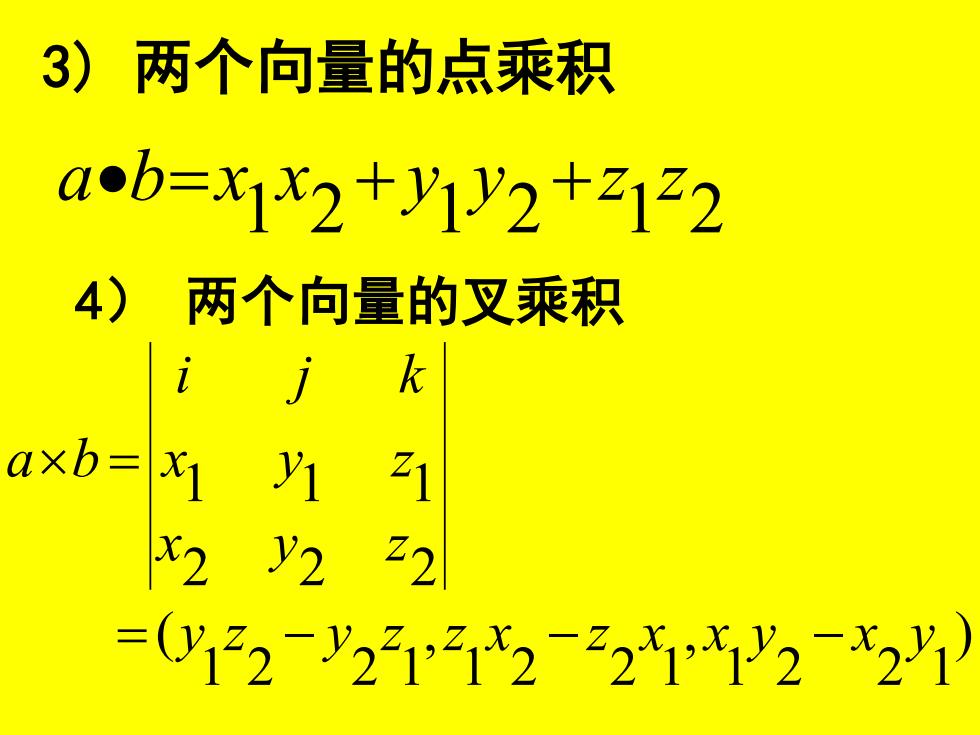
3)两个向量的点乘积 ab=x1x2+y1'2+122 4)两个向量的叉乘积 i a×b= x1 y 21 X2 y2 22 =0122-y23131x2-2211'2-x21
3) 两个向量的点乘积 1 2 1 2 1 2 a•b=x x + y y +z z 4) 两个向量的叉乘积 ) 1 2 2 1 , 1 2 2 1 , 1 2 2 1 ( 2 2 2 1 1 1 y z y z z x z x x y x y x y z x y z i j k a b = − − − =
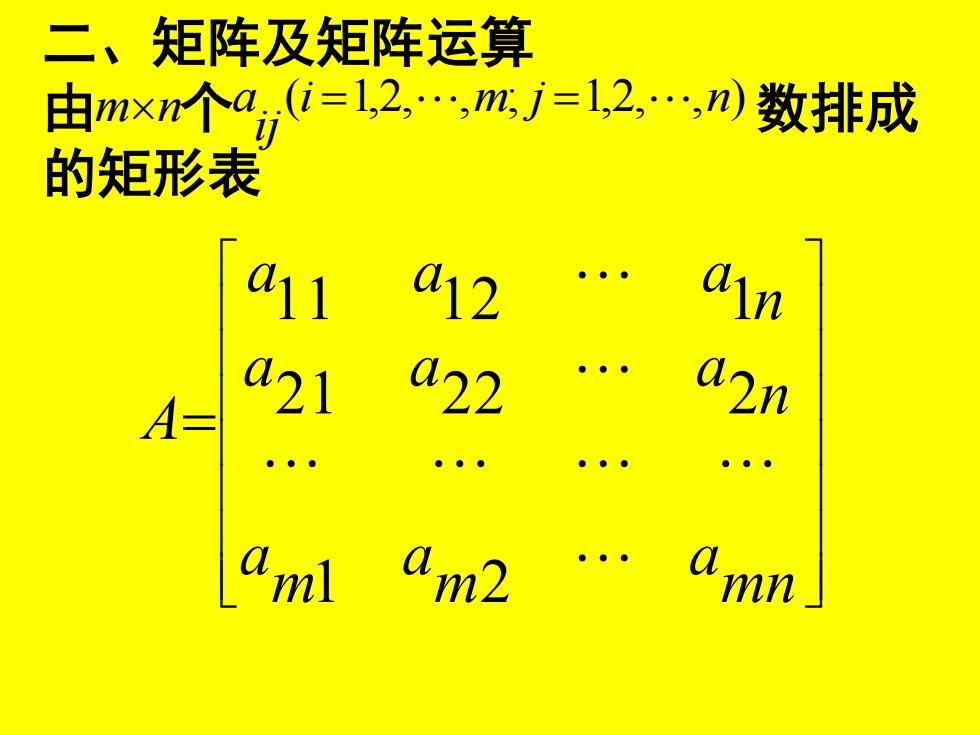
二、矩阵及矩阵运算 由mx个0i=1,2,…,mj=12,川数排成 的矩形表 a11 a12 A- a21 a22 a2n 。。 aml am2 amn
二 、矩阵及矩阵运算 由 个 数排成 的矩形表 m n (i 1,2, ,m; j 1,2, ,n ) ij a = = = mn a m a m a n a a a n a a a A 1 2 2 1 2 2 2 1 1 1 2 1