
德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 地图 地图是对环境结构的几何描述,是机器人自主定位与导航的基础。地图既可以是事先测绘好(离线建图) 也可以是依靠机器人上搭载的传感器测量(在线测绘)得到。 拓扑图 特征图 网格图 b 直接表征法 地图 路标图 CRH 点云图 CRH 认知地图 n 混合地图 号年4年40¥4LA4AL
8.机器人导航与路径规划 7 地 图 地图是对环境结构的几何描述,是机器人自主定位与导航的基础。地图既可以是事先测绘好(离线建图) ,也可以是依靠机器人上搭载的传感器测量(在线测绘)得到。 地图 拓扑图 特征图 网格图 直接表征法 路标图 点云图 认知地图 混合地图 拓扑图把环境建模为一张线图表示,忽略了具体的几何特征信息,不必精确 表示不同节点间的地理位置关系,使用关键帧作为地图的节点,关键帧之间 共同的数据关联作为地图的边。 地铁、公交路线图均是典型的拓扑地图实例,其中停靠站为节点,节点间的 通道为边。在一般的办公环境中,拓扑单元有走廊和房间等,而打印机、桌 椅等则是功能单元。连接器用于连接对应的位置,如门、楼梯、电梯等。 拓扑图可用作路径规划,因缺少度量信息,不适用于导航

德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 地图 地图是对环境结构的几何描述,是机器人自主定位与导航的基础。地 天府广场 也可以是依靠机器人上搭载的传感器测量(在线测绘)得到。 拓扑图 特征图是在结构化环境中,用直线段、角、边兽 特征图 参数表示。 网格图 城市交通图是典型的特征图实例,依靠测距传 人进行定位。 直接表征法 地图 特征法定位准确,模型易于由计算机描述和表方 路标图 轨迹控制,但特征法需要特征提取等预处理过 点云图 高度结构化环境。 认知地图 混合地图
8.机器人导航与路径规划 8 地 图 地图是对环境结构的几何描述,是机器人自主定位与导航的基础。地图既可以是事先测绘好(离线建图) ,也可以是依靠机器人上搭载的传感器测量(在线测绘)得到。 特征图是在结构化环境中,用直线段、角、边等特征的颜色、长度、宽度、位置等 参数表示。 城市交通图是典型的特征图实例,依靠测距传感器,以人工标识或自然标识对机器 人进行定位。 特征法定位准确,模型易于由计算机描述和表示,参数化特征也适用于路径规划和 轨迹控制,但特征法需要特征提取等预处理过程,对传感器噪声比较敏感,只适于 高度结构化环境。 地图 拓扑图 特征图 网格图 直接表征法 路标图 点云图 认知地图 混合地图
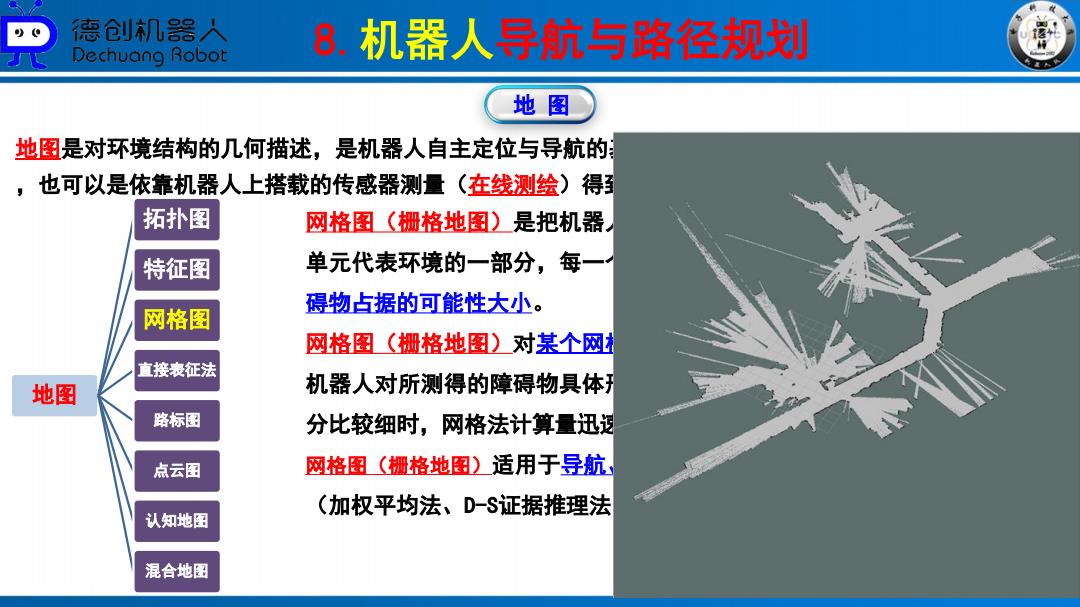
德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 地图 地图是对环境结构的几何描述,是机器人自主定位与导航的 也可以是依靠机器人上搭载的传感器测量(在线测绘)得影 拓扑图 网格图(栅格地图)是把机器, 特征图 单元代表环境的一部分,每一 碍物占据的可能性大小。 网格图 网格图(栅格地图)对某个网使 直接表征法 地图 机器人对所测得的障碍物具体 路标图 分比较细时,网格法计算量迅逻 点云图 网格图(栅格地图)适用于导航 (加权平均法、D-S证据推理法 认知地图 混合地图
8.机器人导航与路径规划 9 地 图 地图是对环境结构的几何描述,是机器人自主定位与导航的基础。地图既可以是事先测绘好(离线建图) ,也可以是依靠机器人上搭载的传感器测量(在线测绘)得到。 网格图(栅格地图)是把机器人的工作空间划分成网状结构,网格中的每一 单元代表环境的一部分,每一个单元都分配了一个概率值,表示该单元被障 碍物占据的可能性大小。 网格图(栅格地图)对某个网格的感知信息可直接与环境中某个区域对应, 机器人对所测得的障碍物具体形状不太敏感。当在大型环境中或网格单元划 分比较细时,网格法计算量迅速增长,内存需求大,实时处理困难。 网格图(栅格地图)适用于导航、路径规划、路径探索。易融合多传感器信息 (加权平均法、D-S证据推理法)。 地图 拓扑图 特征图 网格图 直接表征法 路标图 点云图 认知地图 混合地图
德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 地图 地图是对环境结构的几何描述,是机器人自主定位与导航的基础。地图既可以是事先测绘好(离线建图) 也可以是依靠机器人上搭载的传感器测量(在线测绘)得到。 拓扑图 直接表征法是通过记录来自不同位置及方向的环境外观感知数据,包括某些 特征图 坐标、几何特征或符号信息,是这些位置处的环境特征描述。 网格图 直接表征法从所获取的传感器数据中创建一个函数关系以精确地确定机器人 直接表征法 的位姿。 地图 直接表征法数据存贮量大,环境噪声干扰严重,特征数据的提取与匹配困难 路标图 ,其应用受到一定限制。 点云图 认知地图 混合地图 10
8.机器人导航与路径规划 10 地 图 地图是对环境结构的几何描述,是机器人自主定位与导航的基础。地图既可以是事先测绘好(离线建图) ,也可以是依靠机器人上搭载的传感器测量(在线测绘)得到。 直接表征法是通过记录来自不同位置及方向的环境外观感知数据,包括某些 坐标、几何特征或符号信息,是这些位置处的环境特征描述。 直接表征法从所获取的传感器数据中创建一个函数关系以精确地确定机器人 的位姿。 直接表征法数据存贮量大,环境噪声干扰严重,特征数据的提取与匹配困难 ,其应用受到一定限制。 地图 拓扑图 特征图 网格图 直接表征法 路标图 点云图 认知地图 混合地图
德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 地图 地图是对环境结构的几何描述,是机器人自主定位与导航的基础。地图既可以是事先测绘好(离线建图) ,也可以是依靠机器人上搭载的传感器测量(在线测绘) 得到。 拓扑图 特征图 路标图使用一系列离散的三维路标描述环境,也称为稀疏地图。 网格图 优点:地图只包含有限数量的路标,因此只需要较少的计算量和存储空间。 直接表征法 地图 缺点:环境信息较少,不适用于导航和避障。而且路标必须存在大量显著地特征。 路标图 点云图 认知地图 混合地图 11
8.机器人导航与路径规划 11 地 图 地图是对环境结构的几何描述,是机器人自主定位与导航的基础。地图既可以是事先测绘好(离线建图) ,也可以是依靠机器人上搭载的传感器测量(在线测绘)得到。 路 标 图 使 用 一 系 列 离 散 的 三 维 路 标 描 述 环 境 , 也 称 为 稀 疏 地 图 。 优点:地图只包含有限数量的路标,因此只需要较少的计算量和存储空间。 缺点:环境信息较少,不适用于导航和避障。而且路标必须存在大量显著地特征。 地图 拓扑图 特征图 网格图 直接表征法 路标图 点云图 认知地图 混合地图