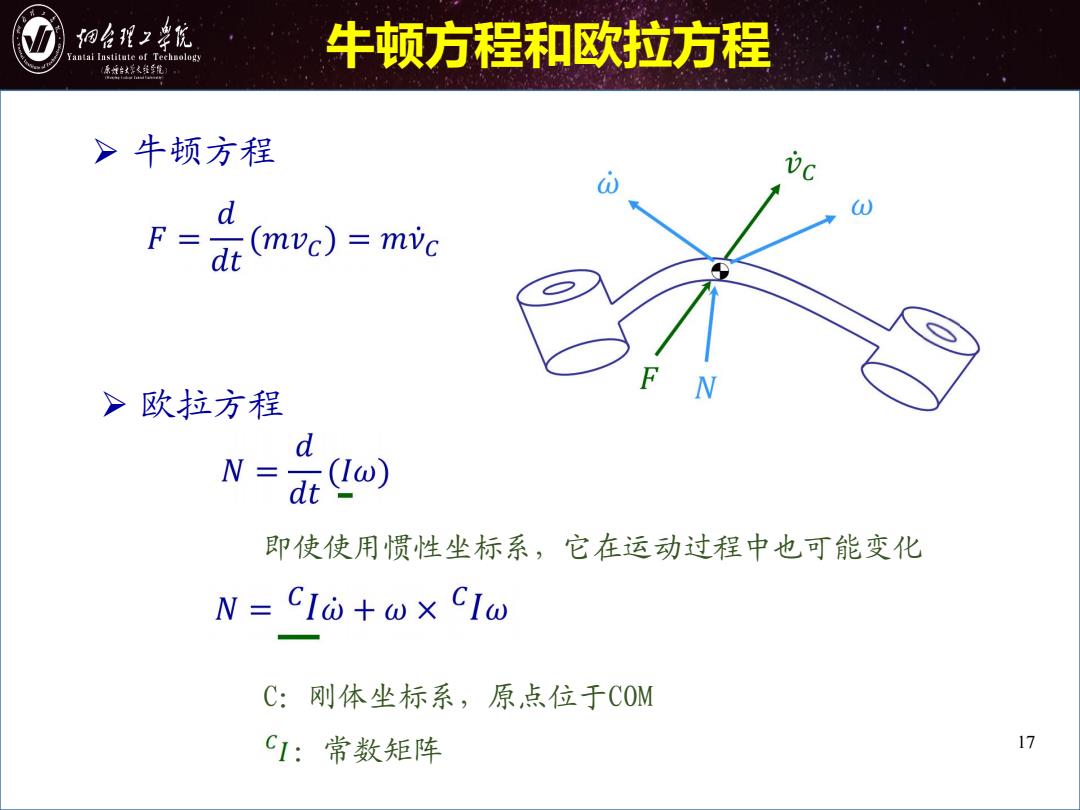
细台程2幸优 antai Institute of Technology 牛顿方程和欧拉方程 原城台好火维年航 》牛顿方程 d F-dt(mvc)=mvc >欧拉方程 d N= lω 即使使用惯性坐标系,它在运动过程中也可能变化 N=CIò+w×cIw C:刚体坐标系,原,点位于C0M C1:常数矩阵 17
17 牛顿方程和欧拉方程 Ø 牛顿方程 即使使用惯性坐标系,它在运动过程中也可能变化 Ø 欧拉方程 C:刚体坐标系,原点位于COM :常数矩阵
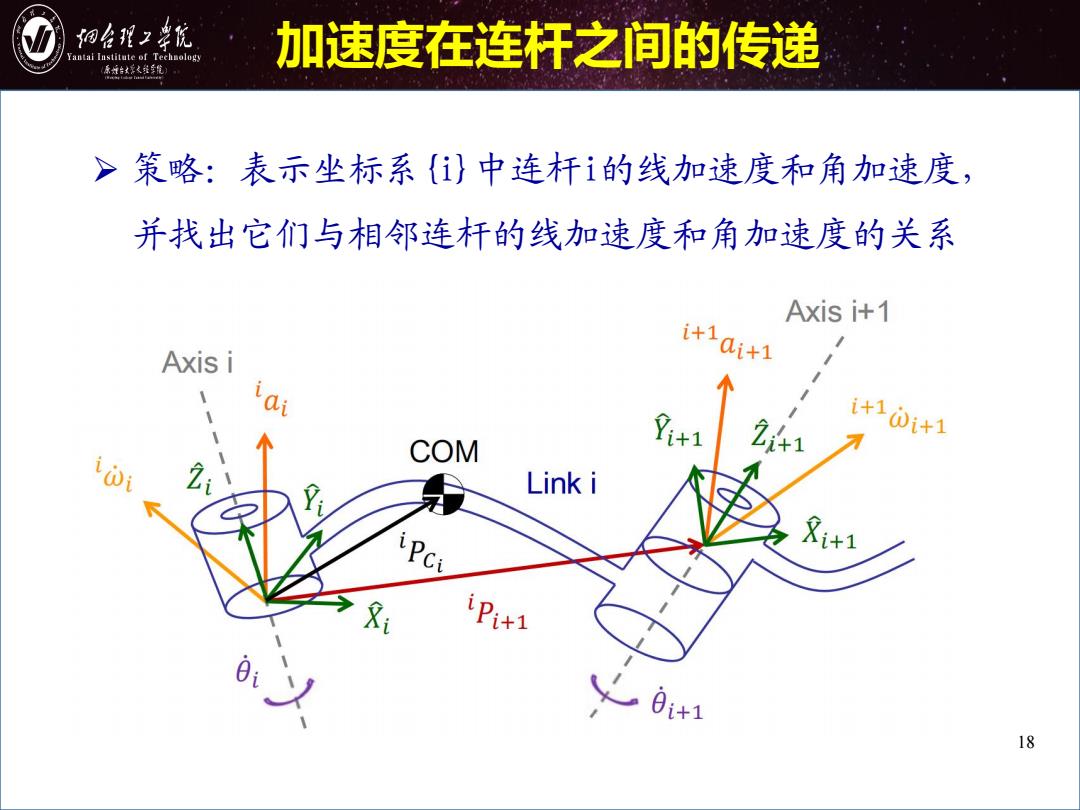
细台程2幸优 antai Institute of Technology 加速度在连杆之间的传递 原城台好火维年院 >策略:表示坐标系{}中连杆i的线加速度和角加速度, 并找出它们与相邻连杆的线加速度和角加速度的关系 Axis i+1 Axis i +10i+1 ai 2+1 +10+1 COM Link i Pci *1 iPiti e +1 18
18 加速度在连杆之间的传递 Ø 策略:表示坐标系{i}中连杆i的线加速度和角加速度, 并找出它们与相邻连杆的线加速度和角加速度的关系