一致性约束 ·对图像进行规范化处理(Normalization) 设参考摄像机和其它摄像机的图像函数分别为 f()和f(亿,),则图像窗内规范化图像函数为: f,j)=(f,)-4o)/o0 f(6,j)=(f,j)-4)/o 是图像窗内光强的平均值,σ是光强分布参数: o2=122(f6,)-四2 mn i=l i=1 相似估价函数为差值绝对值之和6.=∑∑了亿,)-亿,) i=1 i=l
一致性约束 ◼ 对图像进行规范化处理(Normalization) 设参考摄像机和其它摄像机的图像函数分别为 f (i, j) 0 f (i j) k 和 , ,则图像窗内规范化图像函数为: = = = − n j m i f i j mn 1 1 2 2 ( ( , ) ) 1 μ是图像窗内光强的平均值, σ是光强分布参数: = = = − n i m j k k f i j f i j 1 1 0 相似估价函数为差值绝对值之和 ( , ) ( , )

顺序约束 如果在参考图像中点A在 点B的左边=>在目标图 像中点A的匹配点也在点 B的匹配点的左边 ■对细小物体不成立 Image from Sun et al.CVPRO5
顺序约束 ◼ 如果在参考图像中点A在 点B的左边=> 在目标图 像中点A的匹配点也在点 B的匹配点的左边 ◼ 对细小物体不成立 Image from Sun et al. CVPR05

其它约束 唯一性约束 一幅图像(左或右)上的每一个特征点只能与 另一幅图像上的唯一一个特征对应. 连续性约束 物体表面一般都是光滑的,因此物体表面上 各点在图像上的投影也是连续的,它们的视差 也是连续的 在物体边界处,连续性约束不能成立·
其它约束 ◼ 唯一性约束 一幅图像(左或右)上的每一个特征点只能与 另一幅图像上的唯一一个特征对应. ◼ 连续性约束 物体表面一般都是光滑的,因此物体表面上 各点在图像上的投影也是连续的,它们的视差 也是连续的. 在物体边界处,连续性约束不能成立.

特征匹配——稀疏 在立体图像对中识别兴趣点(interesting point),而 后在两幅图像中匹配相对应的点. 识别兴趣点(interesting point) 在图像中具有很大变化的区域内寻找兴趣点 在以某一点为中心的窗函数中,计算其在不同方向上 的变化量 为避免将多个相邻点选为同一个特征对应的兴趣点 将特征点选在兴趣测度函数具有局部最大值的地方
特征匹配——稀疏 ◼ 在立体图像对中识别兴趣点(interesting point),而 后在两幅图像中匹配相对应的点. ◼ 识别兴趣点(interesting point) 在图像中具有很大变化的区域内寻找兴趣点 在以某一点为中心的窗函数中,计算其在不同方向上 的变化量 为避免将多个相邻点选为同一个特征对应的兴趣点, 将特征点选在兴趣测度函数具有局部最大值的地方
特征匹配 左图像 角点 线 结构 茸组年里 生年 ■对于左图像中的每一个特征.…
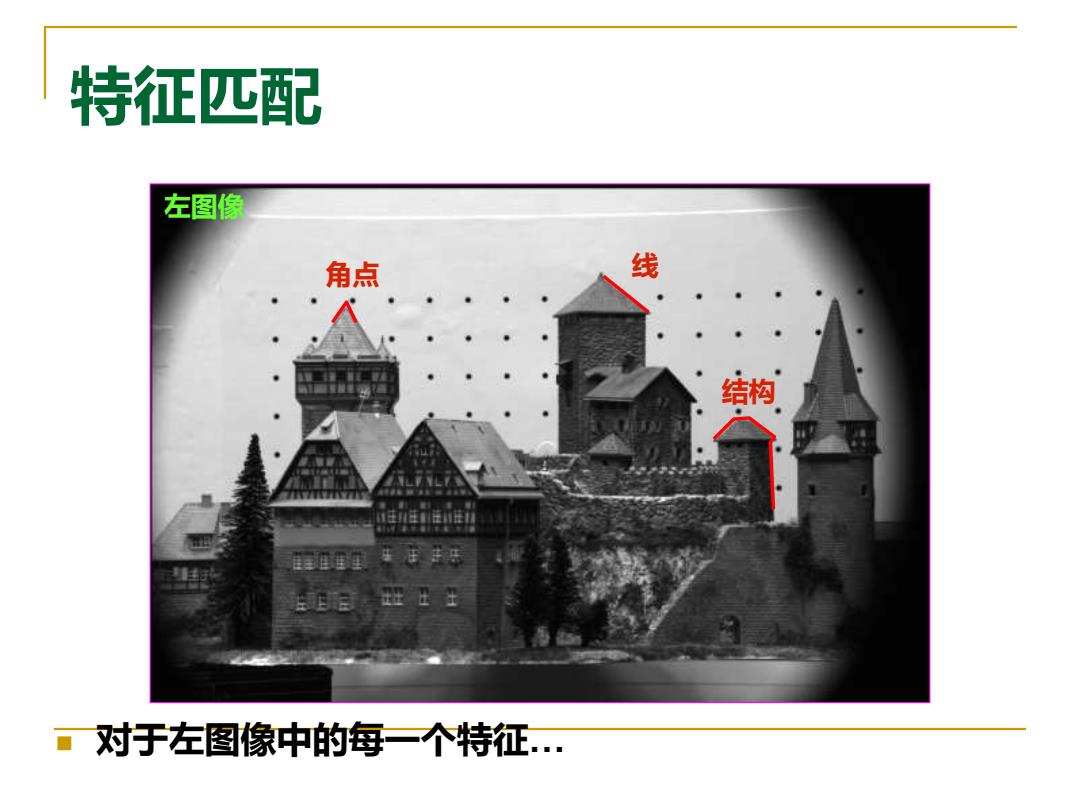
特征匹配 ◼ 对于左图像中的每一个特征… 左图像 角点 线 结构