
平行光轴立体视觉系统 左摄像机 基线 右摄像机 左图像: 右图像: 参考 目标 视差 景深Z 高度Zw Zw=0
平行光轴立体视觉系统 Zw=0 左摄像机 左图像: 参考 右图像: 目标 右摄像机 高度 Zw 视差 景深 Z 基线
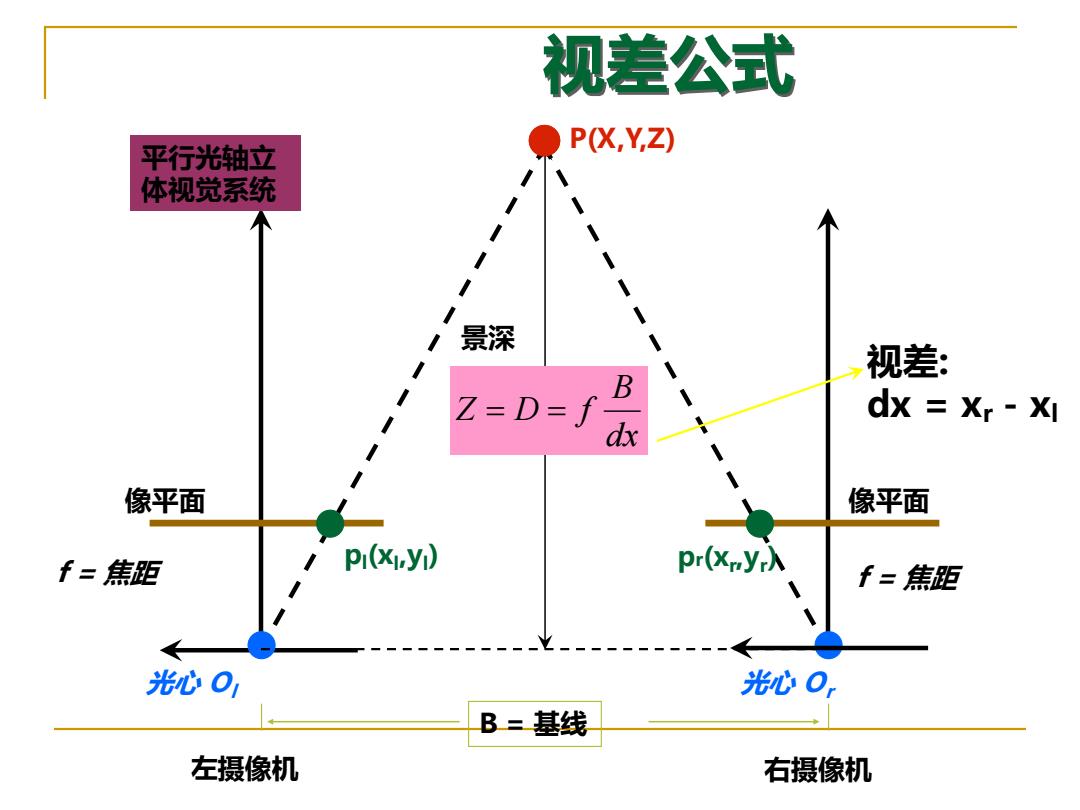
视差公式 平行光轴立 P(X,YZ) 体视觉系统 景深 视差: B Z-D 0= dx Xr -XI dx 像平面 像平面 f=焦距 Pi(xLy) pr(Xyrλ f=焦距 光心O, 光心O, B=基线 左摄像机 右摄像机
视差公式 P(X,Y,Z) pl(xl ,yl ) 光心 Ol f = 焦距 像平面 左摄像机 B = 基线 景深 平行光轴立 体视觉系统 f = 焦距 光心 Or pr(xr ,yr ) 像平面 右摄像机 dx B Z = D = f 视差: dx = xr - xl
立体匹配 求解对应问题是立体成象系统的核心内容 求解对应问题极富有挑战性,可以说是立体视 觉最困难的一步. 方法 口基于特征(点、线)的匹配(稀疏匹配) 基于区域的匹配(稠密匹配)
立体匹配 ◼ 求解对应问题是立体成象系统的核心内容 ◼ 求解对应问题极富有挑战性,可以说是立体视 觉最困难的一步. ◼ 方法 ❑ 基于特征(点、线)的匹配(稀疏匹配) ❑ 基于区域的匹配(稠密匹配)
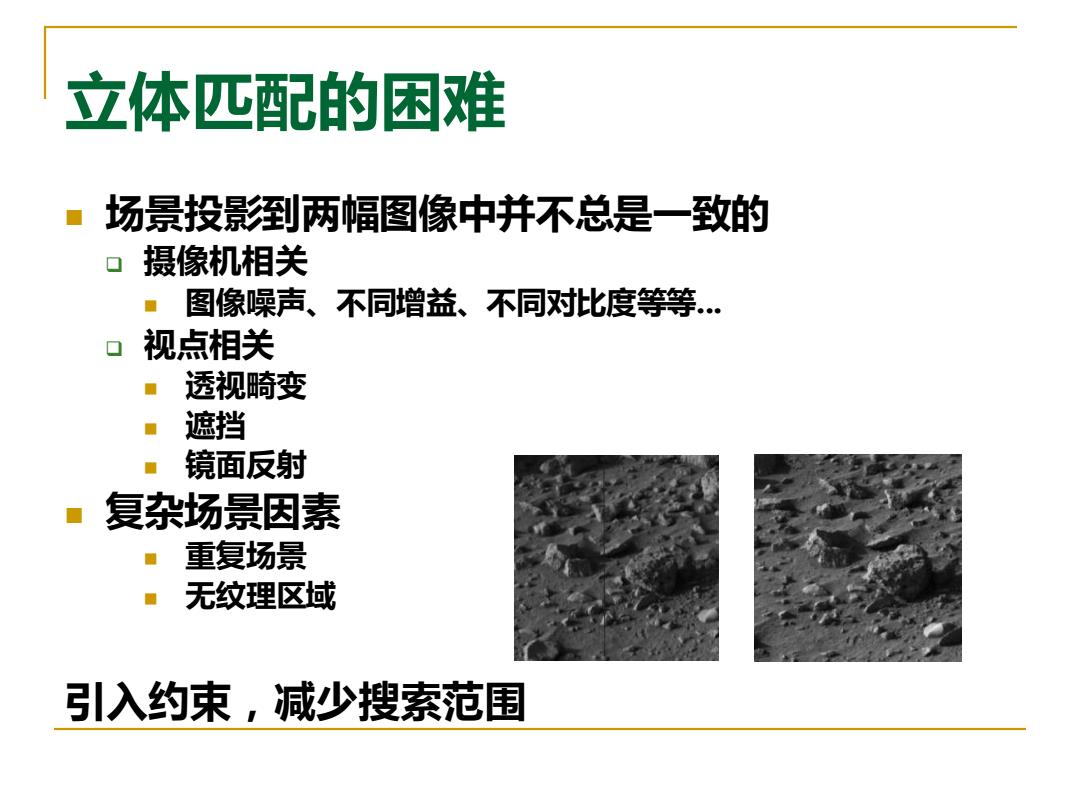
立体匹配的困难 ■场景投影到两幅图像中并不总是一致的 ▣摄像机相关 。 图像噪声、不同增益、不同对比度等等… 0, 视点相关 ■透视畸变 遮挡 镜面反射 复杂场景因素 重复场景 ● 无纹理区域 引入约束,减少搜索范围
立体匹配的困难 ◼ 场景投影到两幅图像中并不总是一致的 ❑ 摄像机相关 ◼ 图像噪声、不同增益、不同对比度等等... ❑ 视点相关 ◼ 透视畸变 ◼ 遮挡 ◼ 镜面反射 ◼ 复杂场景因素 ◼ 重复场景 ◼ 无纹理区域 引入约束,减少搜索范围
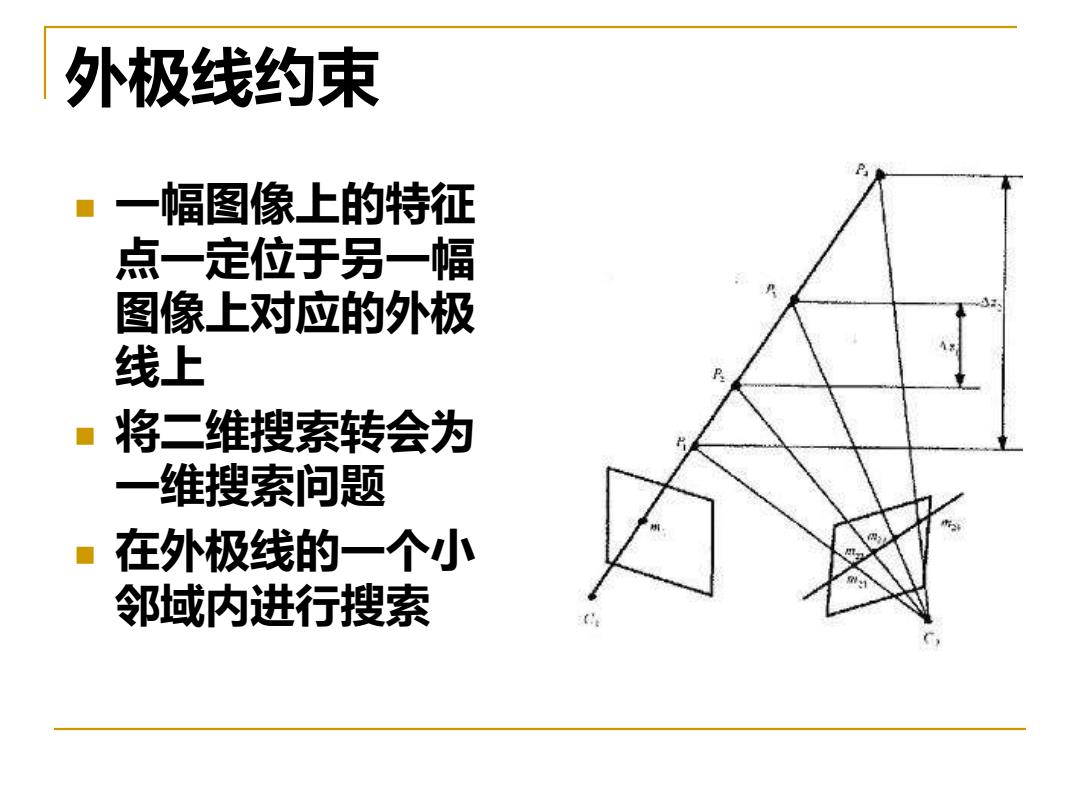
外极线约束 一幅图像上的特征 点一定位于另一幅 图像上对应的外极 线上 将二维搜索转会为 一维搜索问题 在外极线的一个小 邻域内进行搜索
外极线约束 ◼ 一幅图像上的特征 点一定位于另一幅 图像上对应的外极 线上 ◼ 将二维搜索转会为 一维搜索问题 ◼ 在外极线的一个小 邻域内进行搜索