Shape(Structure)From X ●1 解决的是从2D图像到2.5D表面形状(场景深度) 的问题 。Shape from motion 。Shape from stereo Shape from monocular cues(shading,vanishing point,defocus, texture,....)
Shape(Structure) From X 解决的是从2D图像到2.5D表面形状(场景深度) 的问题 Shape from motion Shape from stereo Shape from monocular cues(shading, vanishing point, defocus, texture,….)
第七章基于运动视觉的场景复原
第七章 基于运动视觉的场景复原

三维运动估计 三维运动估计是指从二维图象序列来估计物体三维 运动参数以及三维结构。 ● SFM(Structure From Motion) (R.t)
三维运动估计 三维运动估计是指从二维图象序列来估计物体三维 运动参数以及三维结构。 SFM (Structure From Motion)
三维刚体运动 Xk+1 Xk Xk yk+1 yk +Ts 2k+1 Zk k x= cosy coso ry=sin8 sin y cosφ-cos0sim中 r=cosesin ycoso+sinesin XZ rx=cosysin中 R =sinesin wsin+cosecos ==cosesinwsino-sinecos rx =-sin y ry=sin 0 cosu r=cose cosw
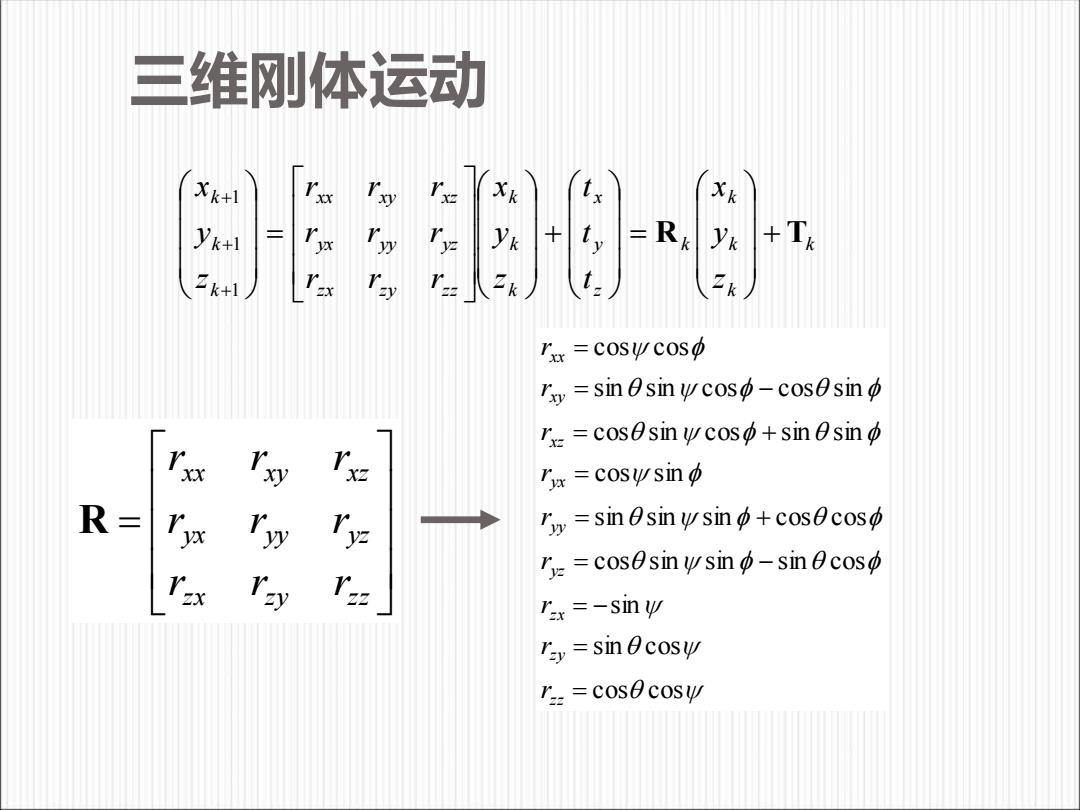
三维刚体运动 k k k k k z y x k k k z x z y z z yx yy yz xx xy xz k k k z y x t t t z y x r r r r r r r r r z y x R + T = + = + + + 1 1 1 cos cos sin cos sin cos sin sin sin cos sin sin sin cos cos cos sin cos sin cos sin sin sin sin cos cos sin cos cos = = = − = − = + = = + = − = z z z y z x yz yy yx xz xy xx r r r r r r r r r = zx zy z z yx yy yz xx xy xz r r r r r r r r r R
小角度旋转 △0, △0 小角度旋转矩阵 △02
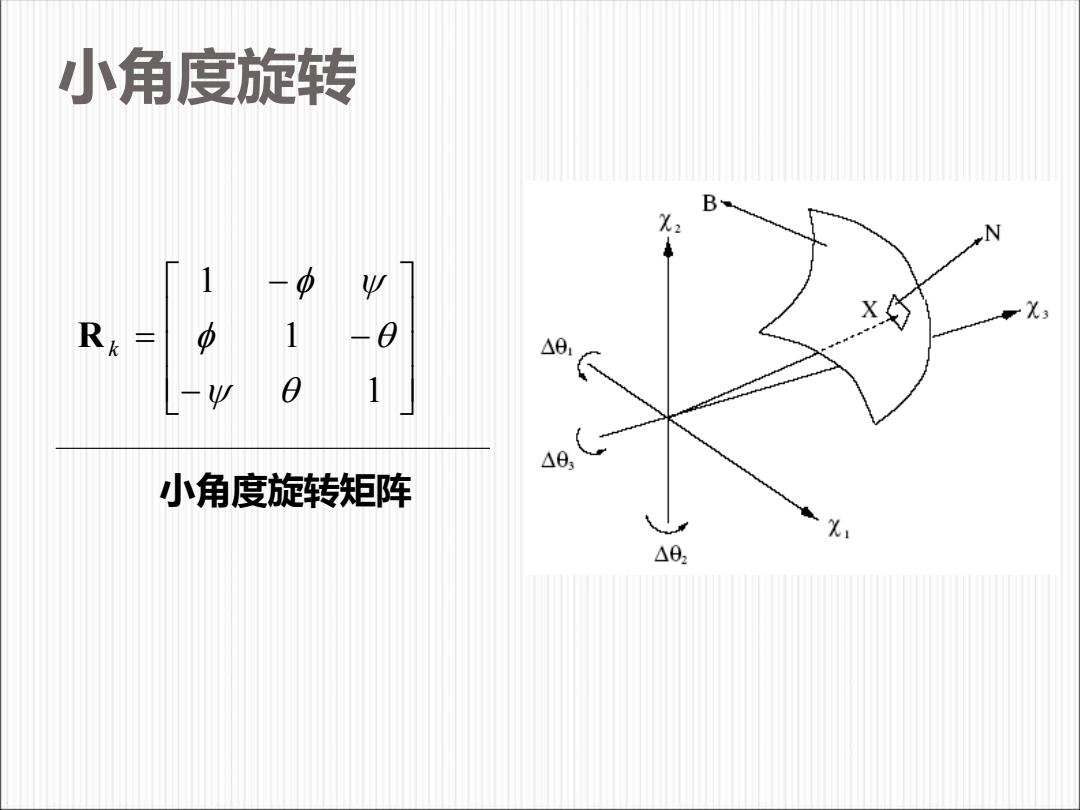
小角度旋转矩阵 − − − = 1 1 1 Rk 小角度旋转