第十一章三维重建 Chapter 11 3D Reconstruction
Chapter 11 3D Reconstruction

三维重建是人类视觉的主要目的,也是计算机视 觉最主要的研究方向.(Marr1982) 所谓三维重建就是指从单幅图像加景物约束、二 幅、二幅以上图像恢复空间点三维坐标的过程。 成像平面 CV:Reconstruction 2023/2/2 2
三维重建是人类视觉的主要目的,也是计算机视 觉最主要的研究方向. (Marr 1982) 所谓三维重建就是指从单幅图像加景物约束、二 幅、二幅以上图像恢复空间点三维坐标的过程。 CV:Reconstruction 2023/2/2 2 成像平面 O
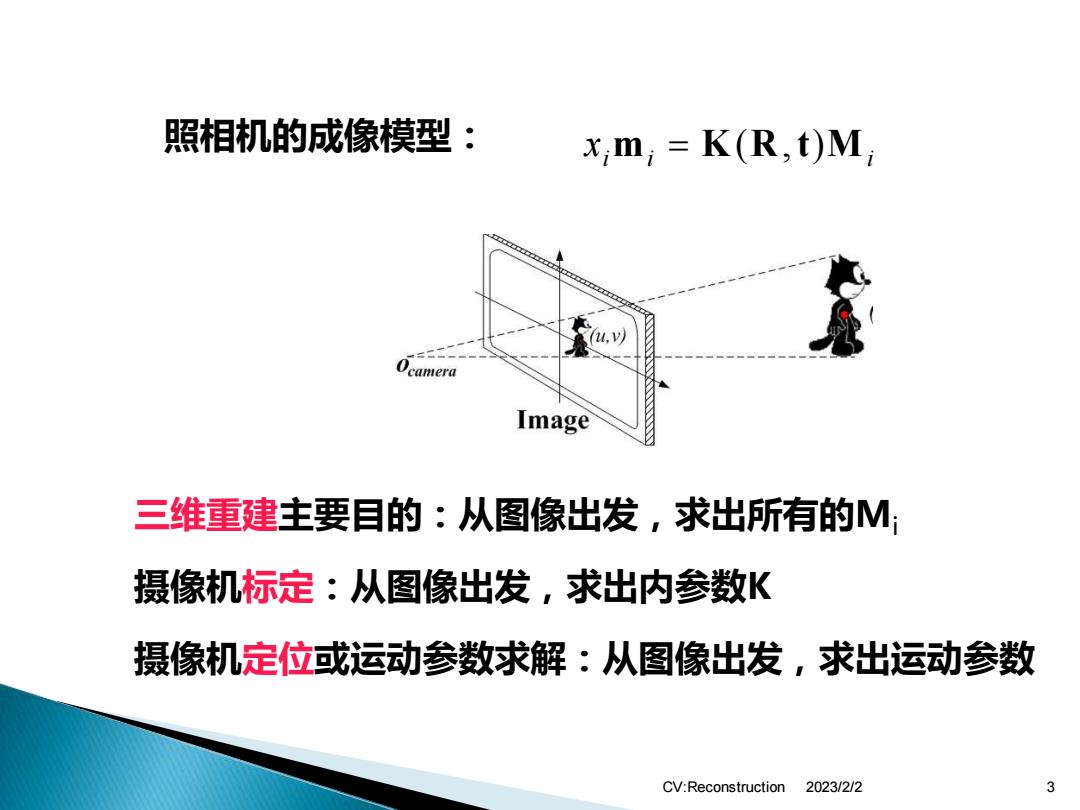
照相机的成像模型: x m;=K(R,t)M E2- Ocamera Image 三维重建主要目的:从图像出发,求出所有的M: 摄像机标定:从图像出发,求出内参数K 摄像机定位或运动参数求解:从图像出发,求出运动参数 CV:Reconstruction 2023/2/2 3
CV:Reconstruction 2023/2/2 3 照相机的成像模型: i i i x m = K(R,t)Μ 三维重建主要目的:从图像出发,求出所有的Mi 摄像机标定:从图像出发,求出内参数K 摄像机定位或运动参数求解:从图像出发,求出运动参数
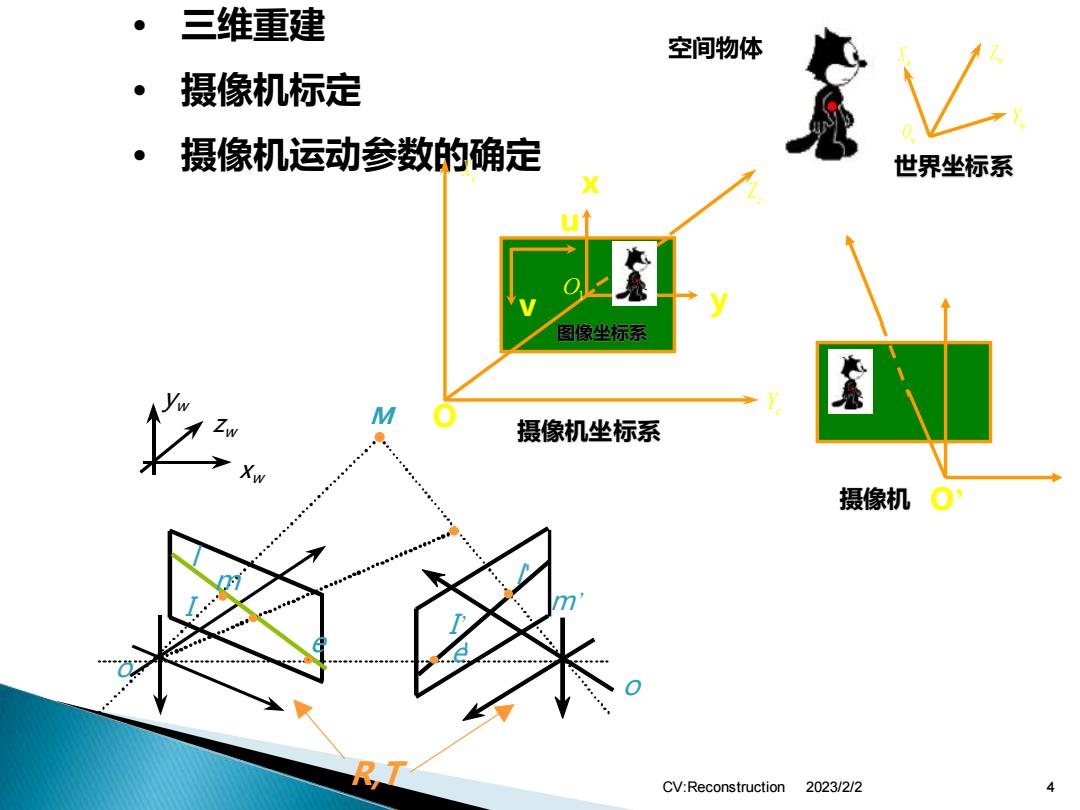
·三维重建 空间物体 摄像机标定 摄像机运动参数的确定 世界坐标系 X 图像坐标系 M 摄像机坐标系 摄像机O CV:Reconstruction 2023/2/2 4
CV:Reconstruction 2023/2/2 4 • 三维重建 • 摄像机标定 • 摄像机运动参数的确定 O u 摄像机坐标系 x v y 图像坐标系 c X c Z Yc O1 世界坐标系 w X w Z w Y Ow 空间物体 摄像机 O’ o I’ I M o m’ m e' e l l' zw xw yw R,T
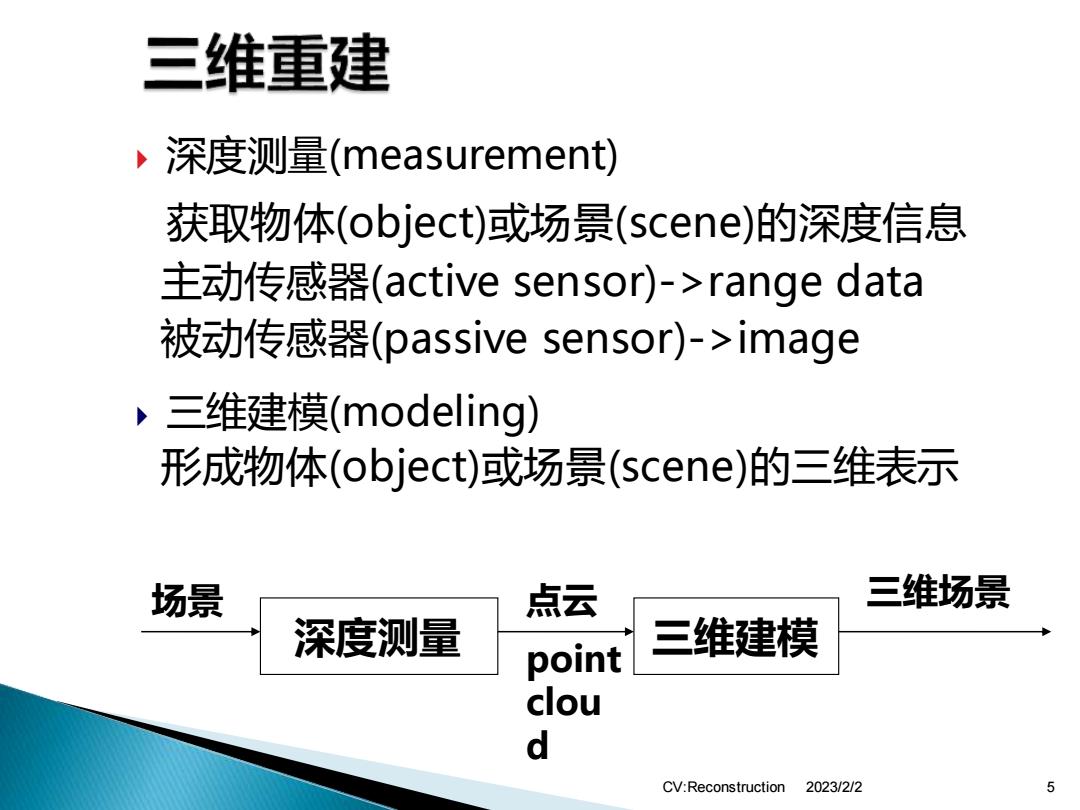
三维重建 ,深度测量(measurement) 获取物体(object)或场景(scene)的深度信息 主动传感器(active sensor)->range data 被动传感器(passive sensor)->image 三维建模(modeling) 形成物体(object)或场景(scene)的三维表示 场景 点云 三维场景 深度测量 point 三维建模 clou d CV:Reconstruction 2023/2/2 5
深度测量(measurement) 获取物体(object)或场景(scene)的深度信息 主动传感器(active sensor)->range data 被动传感器(passive sensor)->image 三维建模(modeling) 形成物体(object)或场景(scene)的三维表示 CV:Reconstruction 2023/2/2 5 深度测量 三维建模 场景 点云 三维场景 point clou d