第十章基于立体视觉的深度估计
第十章 基于立体视觉的深度估计
立体视觉 VUV left eye bateline center of right cye
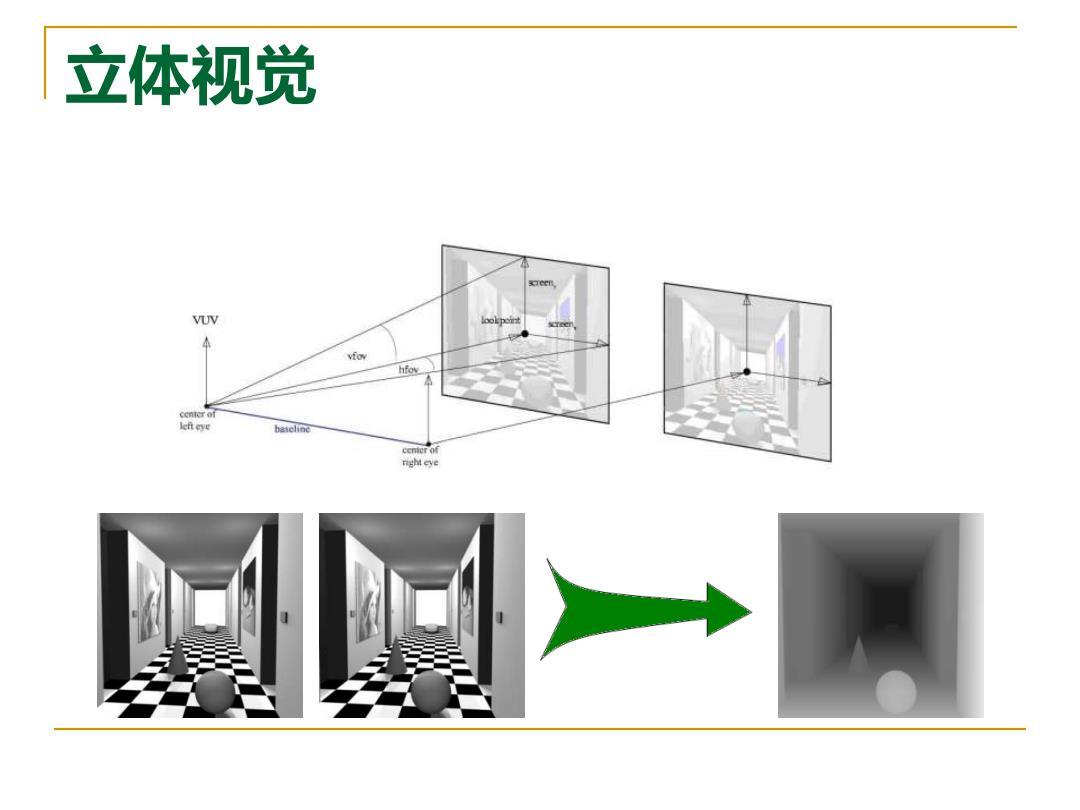
立体视觉

立体成象 我们将场景中同一点在两个不同图像中的投影 点称为共轭对 其中的一个投影点是另一个投影点的对应 (correspondence) 两幅图像重叠时的共轭对点的位置之差(共轭 对点之间的距离)称为视差(disparity) 通过两个摄像机中心并目通过场景特征点的平 面称为外极(epipolar))平面 外极平面与图像平面的交线称为外极线
立体成象 ◼ 我们将场景中同一点在两个不同图像中的投影 点称为共轭对 ◼ 其中的一个投影点是另一个投影点的对应 (correspondence) ◼ 两幅图像重叠时的共轭对点的位置之差(共轭 对点之间的距离)称为视差(disparity) ◼ 通过两个摄像机中心并且通过场景特征点的平 面称为外极(epipolar)平面 ◼ 外极平面与图像平面的交线称为外极线.
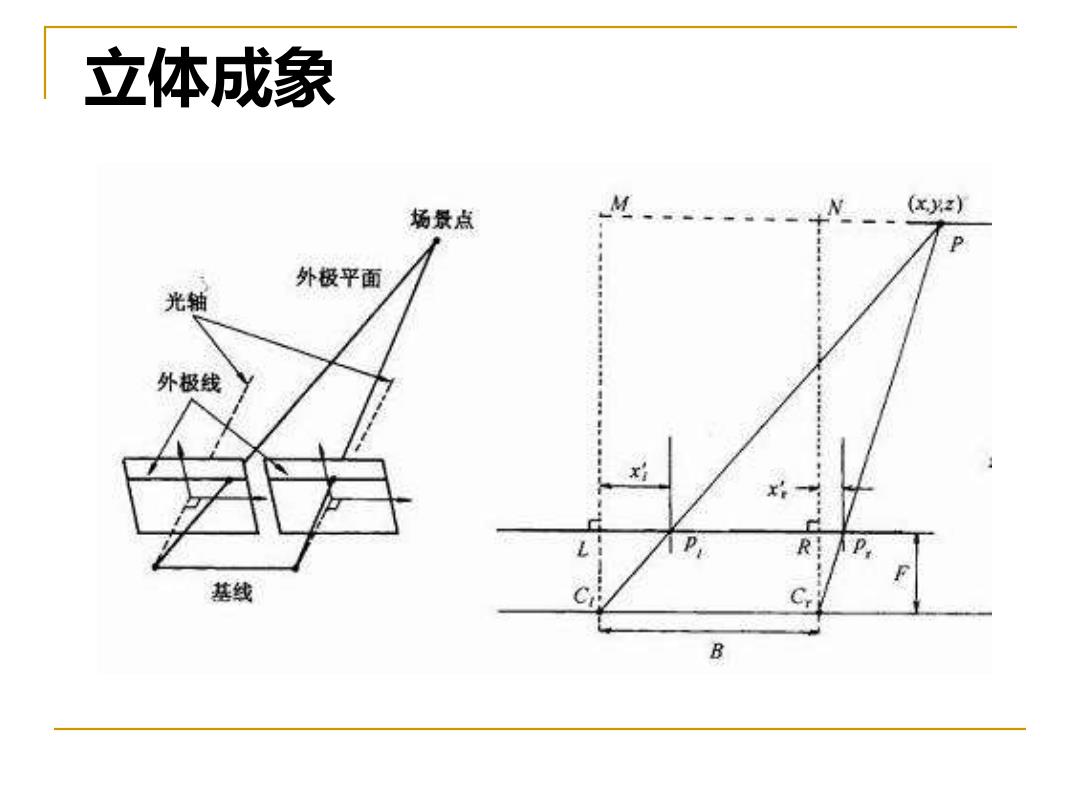
立体成象 场景点 (xz) P 外极平面 光轴 外极线 R 基线 B
立体成象
立体成象 由相似三角形可得 X-x x-B x Z 合并两项,可得 BF Z= xj-x F是焦距,B是基线距离
立体成象 F x z x l = F x z x B r = − l r x x BF z − = 由相似三角形可得 合并两项,可得 F是焦距,B是基线距离