北京航空航天大学 [三维坐标中]绕x转0角 则有: X3 Lu=cos 0 L12c0s(90°-0)=sin0 ¥2 L13-0 L2cos(90°+0)=-sin0 L22=cos 0 L23=L31=L320=c0s90° 0 L331 1 即:R= cos 0 sin0 0 -sin 0 cos 0 0 0 0 1 教字图像处要
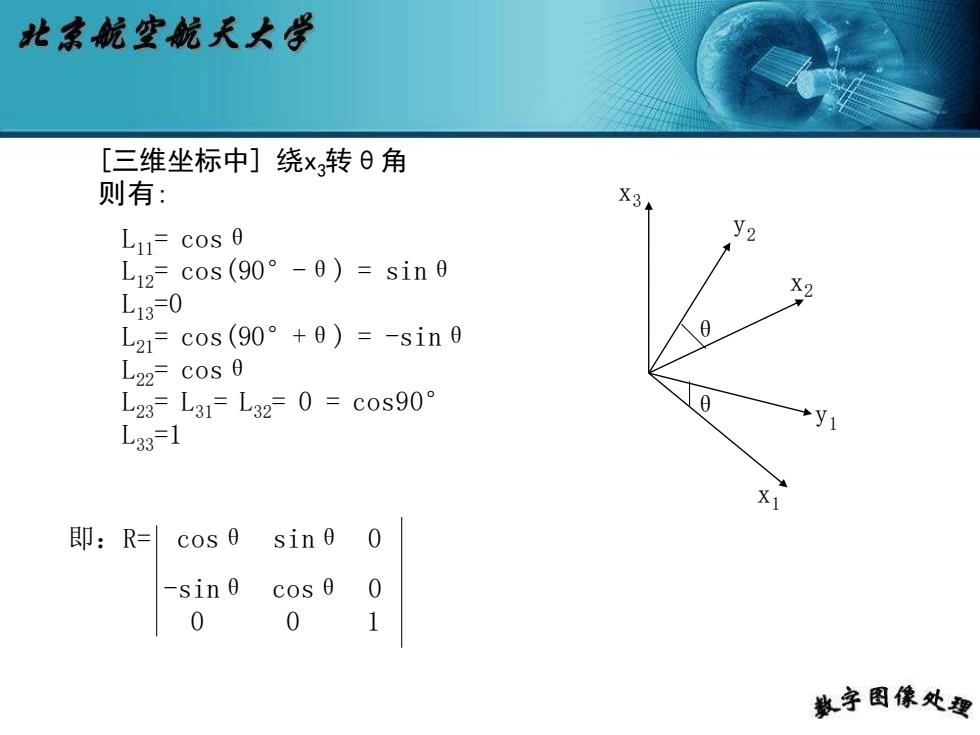
-sinθ cosθ 0 0 0 1 即:R= cosθ sinθ 0 [三维坐标中] 绕x3转θ角 则有: L11= cosθ L12= cos(90°-θ) = sinθ L13=0 L21= cos(90°+θ) = -sinθ L22= cosθ L23= L31= L32= 0 = cos90° L33=1 x2 x3 x1 y1 y2 θ θ
北素航空航天大学 矩阵正交条件: 含a6 引 或之aaw=8 旋转阵R为正交矩阵: 二维时: y1= cos0 sin0 y2 -sin0 cos0 X2 有: cos0 -sin0 sin0 cos0 教字因像处要
= = = = = = n k ki kj n k ik jk i j i j a a i j i j a a 1 1 0 1 或: 0 1 矩阵正交条件: 旋转阵R为正交矩阵: 二维时: y1 = cosθ sinθ x1 y2 -sinθ cosθ x2 有: x1 = cosθ –sinθ y1 x2 sinθ cosθ y2
北京航空航天大常 A 三维时: 有:L1m2+L122+L132=1 Q B A2 (cos2 a +cos2 B+cos2y )=A2 正交阵RT=Rl 有:X=RTY x1=L1y+L21y2+L31y3 X2=L12y1+L22y2+L32y3 X3=L13y1+L23y2+L33y3 教字国像处安
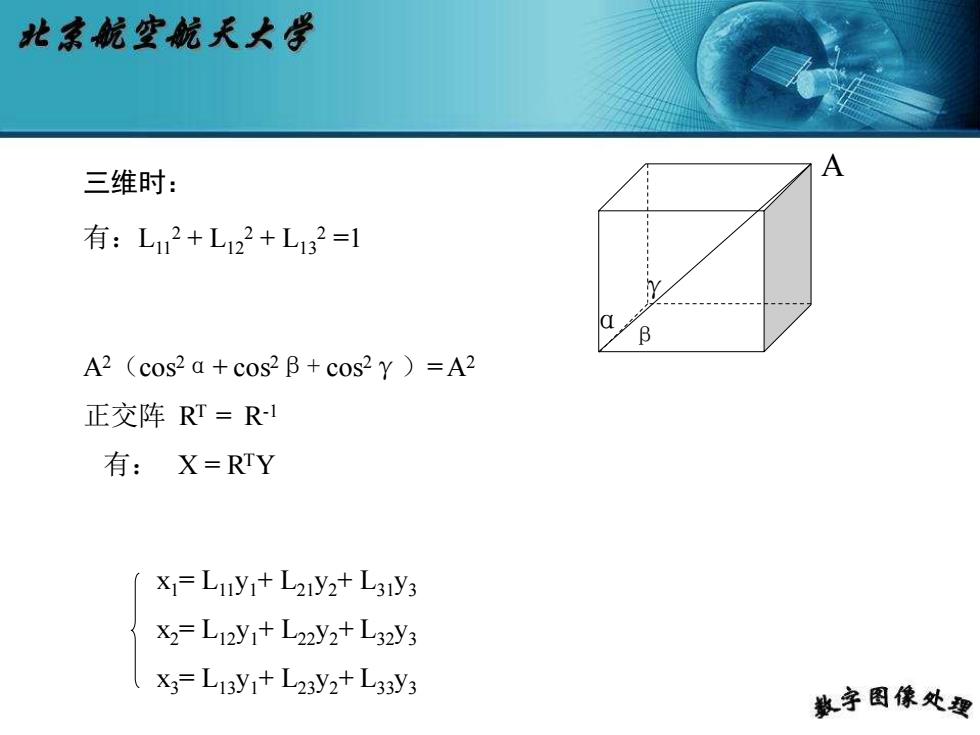
三维时: 有:L11 2 + L12 2 + L13 2 =1 β γ α A A2(cos2α+ cos2β+ cos2γ)= A2 正交阵 RT = R-1 有: X = RTY x1= L11y1+ L21y2+ L31y3 x2= L12y1+ L22y2+ L32y3 x3= L13y1+ L23y2+ L33y3
北京航空航天大增 绕x3、×2、x旋转的矩阵,转角逆时针为正: 绕x轴转0角 cos 0 sin 0 R -sin 0 cos 0 0 0 10 绕x轴转B角 cos B 0 -sinB R2= 0 1 0 sinB 0 cos B B 绕x轴转Y角 *X3 X3 0 0 R 0 cosy siny 0 -siny cosy 教字因像处要
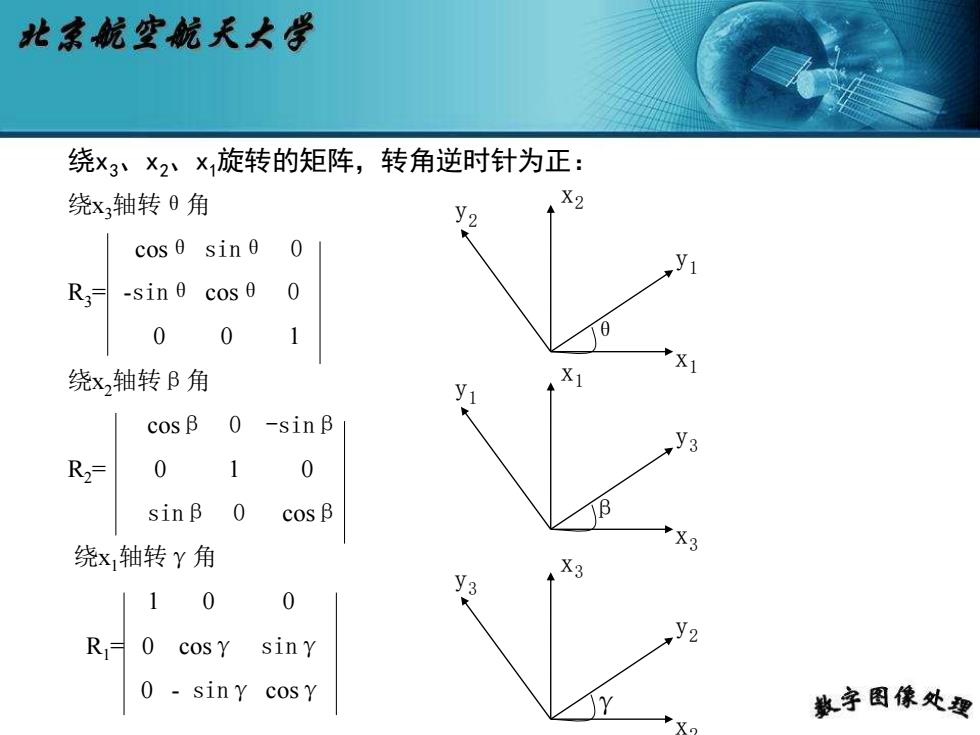
绕x3、x2、x1旋转的矩阵,转角逆时针为正: 绕x3轴转θ角 cosθ sinθ 0 R3= -sinθ cosθ 0 0 0 1 绕x2轴转β角 cosβ 0 -sinβ R2= 0 1 0 sinβ 0 cosβ 绕x1轴转γ角 1 0 0 R1= 0 cosγ sinγ 0 - sinγ cosγ x2 y2 θ x1 y1 x3 y3 γ x2 y2 x1 y1 β x3 y3

北京航空航天大学 任意旋转: R=R,R(6,,k=1,2,3) 注意到: m11m12m13 R= m21m22 m23 只包括旋转。 m31 m32 m33 教字图像处安
任意旋转: R = R R R (i, j, k =1,2,3) i j k 注意到: m11 m12 m13 R = m21 m22 m23 只包括旋转。 m31 m32 m33