3.2动量算符与角动量算符(续4) Chapt.3 The Dynamical variable in Quantum Mechanism 这表明动量只能取分立值。换言之,加上周期性边 界条件后,连续谱变成了分立谱。 L/2 由归一化条件∫了小y,rfdr=∫了4adt =AL=1 A=L3/2 1 .r 归一化本征函数 y()=」 eh 自由粒子波函数 平(=%.)e 26
26 Chapt.3 The Dynamical variable in Quantum Mechanism 由归一化条件 2 2 2 2 3 2 2 ( ) L L P L L ψ r d r A dxdydz − − = ∫∫∫ ∫∫∫ K K 1 3 2 LA == − 2/3 A = L 这表明动量只能取分立值。换言之,加上周期性边 界条件后,连续谱变成了分立谱。 归一化本征函数 rPi P e L r K K = K K ⋅ = 2/3 1 ψ )( 自由粒子波函数 ( ) () P i E t P p r,t r e ψ − Ψ = G = G G G 3.2 动量算符与角动量算符(续4)
3.2动量算符与角动量算符(续5) Chapt.3 The Dynamical variable in Quantum Mechanism 讨论 (1)从这里可以看出,只有在分立谱情况下,波函数 才能归一化为一;连续谱情况,归一化为δ函数。 (2)由.P=2n,πh/L,P,=2n,πh/L,P=2n,πh/L 可以看出,相邻两本征值的间隔△P=2π/L与L成 反比。当L足够大时,本征值间隔可任意小;当 L→∞时P→0,即离散谱→连续谱 (3)在自由粒子波函数平(行,)所描写的状态 中,粒子动量有确定值,该确定值就是动量算符 在这个态中的本征值。 27
27 Chapt.3 The Dynamical variable in Quantum Mechanism (2)由 可以看出,相邻两本征值的间隔 与 成 反比。当 足够大时,本征值间隔可任意小;当 时 ,即离散谱→连续谱 2 ,2 ,2 Pxx yy zz = n LP n LP n L π=== = = π π ΔP = 2π = L L L L→∞ → 0 ΔPx 讨 论 (1)从这里可以看出,只有在分立谱情况下,波函数 才能归一化为一;连续谱情况,归一化为 δ 函数。 (3)在自由粒子波函数 所描写的状态 中,粒子动量有确定值,该确定值就是动量算符 在这个态中的本征值。 ( , ) P ΨG r t G 3.2 动量算符与角动量算符(续5)
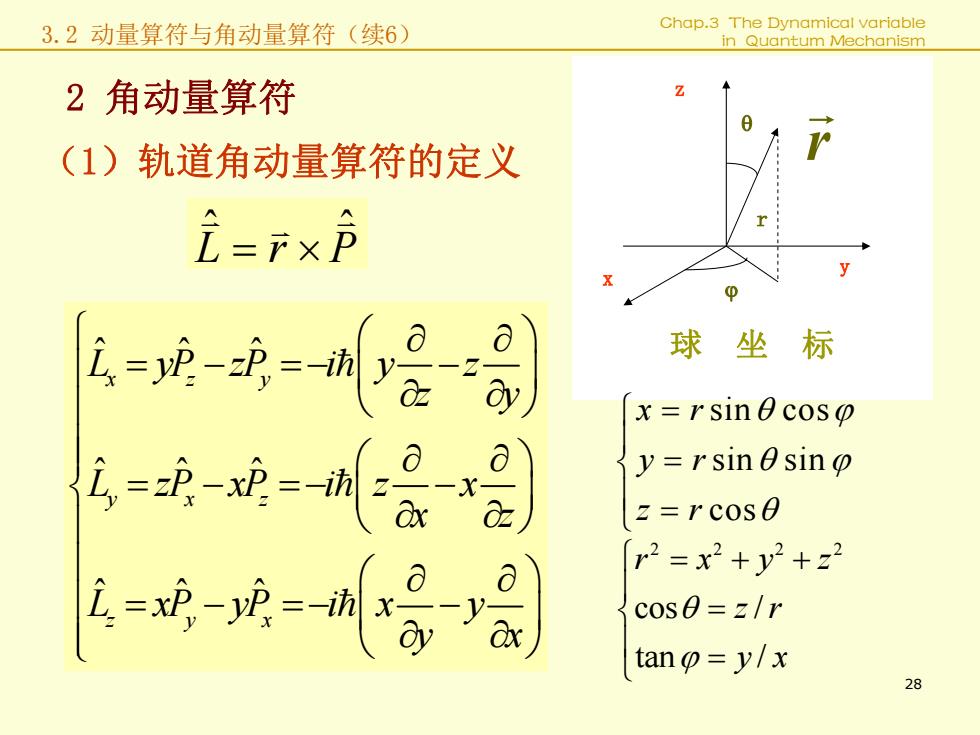
3.2动量算符与角动量算符(续6) Chap.3 The Dynamical variable in Quantum Mechanism 2角动量算符 (1)轨道角动量算符的定义 i=rxp 0 i=2-求=a 球坐标 Z x=rsinθcosp 2明正 y=rsinsino -X一 :d z=rcos0 r2=x2+y2+z2 正=心-呢动 cos0=z/r tano=y/x 28
28 Chap.3 The Dynamical variable in Quantum Mechanism ˆ ˆ L = ×r P K K K 2 角动量算符 (1)轨道角动量算符的定义 ˆ ˆ ˆ ˆ ˆ ˆ ˆˆˆ x zy y xz z yx L yP zP i y z z y L zP xP i z x x z L xP yP i x y y x ⎧ ⎛ ⎞ ∂ ∂ ⎪ = − =− − ⎜ ⎟ ⎝ ⎠ ∂ ∂ ⎪⎪⎪ ⎛ ⎞ ∂ ∂ ⎨ = − =− − ⎜ ⎟ ⎝ ⎠ ∂ ∂ ⎪⎪ ⎛ ⎞ ∂ ∂ ⎪ = − =− − ⎜ ⎟ ⎪ ⎝ ⎠ ∂ ∂ ⎩ === θ r G x z 球坐标 r ϕ y sin cos sin sin cos x r y r z r θ ϕ θ ϕ θ ⎧ = ⎪⎨ = ⎪⎩ = 2 2 22 cos / tan / r xyz z r y x θ ϕ ⎧ = + + ⎪⎨ = ⎪ = ⎩ 3.2 动量算符与角动量算符(续6)

3.2动量算符与角动量算符(续7) Chapt.3 The Dynamical variable in Quantum Mechanism 利用直角坐标与球坐标之间的变换关系,求得偏导数 aa ar aa0 8x or dx 80 8x 808x aa ar a a0 0∂p dy ar dy 00 ay ao ay aa ar 0 .0∂p 0z 00 0z ao 8z Or =sinecos o81 ao 1 sin o Ox =cos0coso &x r 8x r sin O Or =sinsino a01 ap 8y =-cosesino 1 cosp ay ay r sin 0 Or = cos0 601 =-sin0 ap =0 0z 02 0z 29
29 Chapt.3 The Dynamical variable in Quantum Mechanism r x rx x x r y ry y y r z rz z z θ ϕ θ ϕ θ ϕ θ ϕ θ ϕ θ ϕ ⎧ ∂ ∂∂ ∂∂ ∂∂ =+ + ⎪ ∂ ∂∂ ∂ ∂ ∂ ∂ ⎪ ⎪ ∂ ∂∂ ∂∂ ∂∂ ⎨ =+ + ∂ ∂∂ ∂ ∂ ∂ ∂ ⎪ ⎪ ∂ ∂∂ ∂∂ ∂ ∂ ⎪ =+ + ⎩ ∂ ∂∂ ∂ ∂ ∂ ∂ sin cos sin sin cos r x r y r z θ ϕ θ ϕ θ ⎧ ∂ = ⎪∂⎪ ⎪∂ ⎨ = ∂⎪ ⎪∂ ⎪ = ⎩ ∂ 1 cos cos 1cos sin 1sin x r y r z r θ θ ϕ θ θ ϕ θ θ ⎧ ∂ = ⎪ ∂ ⎪ ⎪∂ ⎨ = ∂⎪ ⎪∂ ⎪ = − ⎩ ∂ 1 sin sin 1 cos sin 0 x r y r z ϕ ϕ θ ϕ ϕ θ ϕ ⎧ ∂ = − ⎪ ∂ ⎪ ⎪ ∂ ⎨ = ∂ ⎪ ⎪ ∂ ⎪ = ⎩ ∂ 利用直角坐标与球坐标之间的变换关系,求得偏导数 3.2 动量算符与角动量算符(续7)
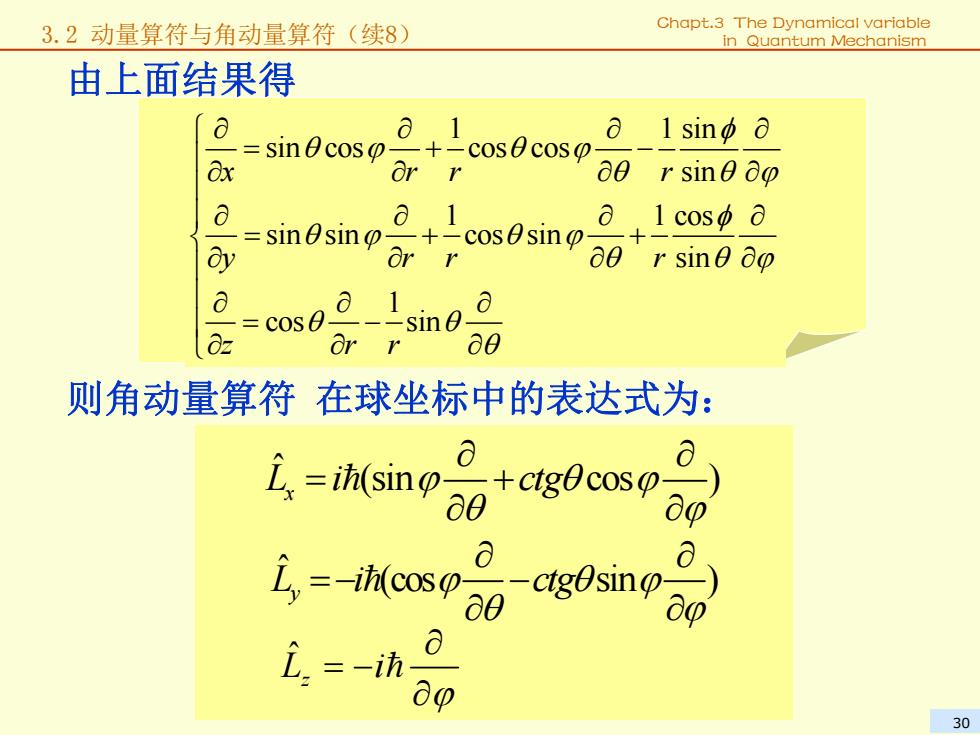
3.2动量算符与角动量算符(续8) Chapt.3 The Dynamical variable in Quantum Mechanism 由上面结果得 1 a1sinφa =sinθcosp+-cos0cosp Ox Or r 00 r sineap a ∂1 a,1cosφa ay =sinesino+-cosesinp Or r 00 r sine dp a =cos0 01 Or r ae 则角动量算符在球坐标中的表达式为: a a L=ih(sin+ctgocoso- ae a L,=-ih(cos -cigosino- 1=-h a 30
30 Chapt.3 The Dynamical variable in Quantum Mechanism 1 1 s i n sin cos cos cos sin 1 1 c o s sin sin cos sin sin 1 cos sin x rr r y rr r z rr φ θϕ θϕ θ θ ϕ φ θϕ θϕ θ θ ϕ θ θ θ ⎧ ∂ ∂ ∂∂ =+ − ⎪∂ ∂ ∂∂ ⎪ ⎪ ∂ ∂ ∂∂ ⎨ =+ + ∂ ∂ ∂∂ ⎪ ⎪ ∂∂ ∂ ⎪ = − ⎩∂∂ ∂ 由上面结果得 则角动量算符 在球坐标中的表达式为: ˆ (sin cos ) L i ctg x ϕ θϕ θ ϕ ∂ ∂ = + ∂ ∂ = ˆ (cos sin ) L i ctg y ϕ θϕ θ ϕ ∂ ∂ =− − ∂ ∂ = ˆ L i z ϕ ∂ = − ∂ = 3.2 动量算符与角动量算符(续8)