Chap.4 The representsllion for the stetes and dynamical varable Chapter.4 态和力学量的表象 The representation for the states and dynamical variable 按量子力学基本原理,体系的状态用波函数描述,力学量用线 性厄米算符表示。前面所使用的波函数及力学量算符是以坐标 这个力学量算符的本征值为变量写出它们的具体形式的。那么, 是否还可以选择其它力学量算符的本征值作为变量而写出波函 数及力学量算符的具体形式呢?回答是肯定的。这就是说量子 力学中波函数和力学量算符的描述方式不是唯一的,这正如几何 学中选用坐标系不是唯一的一样。坐标系有直角坐标系、球坐 标系、柱坐标系等,但它们对空间的描写是完全是等价的。 量子力学中态和力学量的具体表示方式称为表象
Chap.4 The representation for the states and dynamical variable 1 引 言 按量子力学基本原理,体系的状态用波函数描述,力学量用线 性厄米算符表示。前面所使用的波函数及力学量算符是以坐标 这个力学量算符的本征值为变量写出它们的具体形式的。那么, 是否还可以选择其它力学量算符的本征值作为变量而写出波函 数及力学量算符的具体形式呢?回答是肯定的。这就是说量子 力学中波函数和力学量算符的描述方式不是唯一的,这正如几何 学中选用坐标系不是唯一的一样。坐标系有直角坐标系、球坐 标系、柱坐标系等,但它们对空间的描写是完全是等价的。 量子力学中态和力学量的具体表示方式称为表象。 The representation for the states and dynamical variable The representation for the states and dynamical variable Chapter.4 态和力学量的表象
Chap.4 The representation for the states and dynamical varlable 4.1 态的表象 研究内容 The representation of the state 4.2 算符的矩阵表示 Matrix representation of operators 4.3 量子力学公式的矩阵表示 Matrix representation of formula for quantum mechanism 4.4幺正变换(可移至本章结尾) Unitary transformation 4.5 狄喇克符号 Dirac symbols 4.6 线形谐振子与占有数表象 Linear oscillator and occupation number representation 2
Chap.4 The representation for the states and dynamical variable 2 4.1 态的表象 The representation of the state 4.2 算符的矩阵表示 Matrix representation of operators 4.3 量子力学公式的矩阵表示 Matrix representation of formula for quantum mechanism 4.4 幺正变换(可移至本章结尾) Unitary transformation 4.5 狄喇克符号 Dirac symbols 4.6 线形谐振子与占有数表象 Linear oscillator and occupation number representation 研 究 内 容
Chap.4 The representsllon for the states and dynamical varlable 一个定义: 表象的定义 重 态在任意表象中的表示; 二个表示: 点 算符在任意表象中的表示。 掌 平均值公式 ◆三个公式 本征值方程 在任意表象中 握 薛定谔方程 的表示 的 么正变换的基本性质 内容 狄喇克符号及应用 产生算符、湮灭算符、 粒子数算符及它 们的物理意义 主要数学工具: 矩阵 3
Chap.4 The representation for the states and dynamical variable 3 重 点 掌 握 的 内 容 ◆ 二个表示: 态在任意表象中的表示; 算符在任意表象中的表示。 ◆三个公式: 在任意表象中 的表示 平均值公式 本征值方程 薛定谔方程 ◆ 狄喇克符号及应用 ◆ 幺正变换的基本性质 ◆ 一个定义: 表象的定义 ◆ 产生算符、湮灭算符、粒子数算符及它 们的物理意义 主要数学工具: 矩阵
Chap.4 The representstion for the states and dynamical varlable §1态的表象 到目前为止,体系的状态都用坐标(x,y,)的函数表示,也 就是说描写状态的波函数是坐标的函数。力学量则用作用于坐标函 数的算符表示。但是这种描述方式在量子力学中并不是唯一的,这 正如几何学中选用坐标系不是唯一的一样。坐标系有直角坐标系、 球坐标系、柱坐标系等,但它们对空间的描写是完全是等价的。 波函数也可以选用其它变量的函数,力学量则相应的表示为作 用于这种函数上的算符。 表象:量子力学中态和力学量的具体表示方式称为表象。 以前采用的是坐标表象,下面我们要介绍其他表象。 (一)动量表象 (二)力学量表象 (三)讨论
Chap.4 The representation for the states and dynamical variable 4 (一)动量表象 (二)力学量表象 (三)讨论 §1 态的表象 到目前为止,体系的状态都用坐标(x,y,z)的函数表示,也 就是说描写状态的波函数是坐标的函数。力学量则用作用于坐标函 数的算符表示。但是这种描述方式在量子力学中并不是唯一的,这 正如几何学中选用坐标系不是唯一的一样。坐标系有直角坐标系、 球坐标系、柱坐标系等,但它们对空间的描写是完全是等价的。 波函数也可以选用其它变量的函数,力学量则相应的表示为作 用于这种函数上的算符。 表象:量子力学中态和力学量的具体表示方式称为表象。 以前采用的是坐标表象,下面我们要介绍其他表象
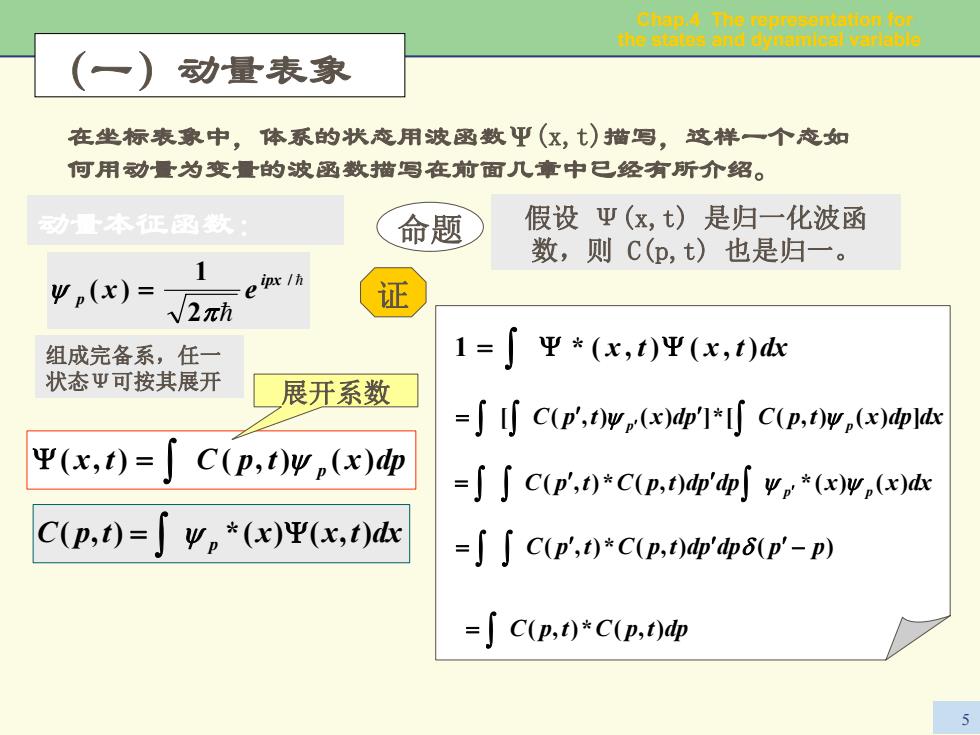
Chap.A The representslion for the stetes and dynamical varlable (一) 动量表象 在坐标表象中,体系的状态用波函数平(区,七)描写,这样一个态如 何用动量为变量的波函数描写在前面几章中已经有所介绍。 动量本征逐数 命题 假设平(x,t)是归一化波函 数,则C(p,t)也是归一。 Ψp(x)= ep1市 √2πh 证 组成完备系,任一 1=「Ψ*(x,t)平(x,t)d 状态Ψ可按其展开 展开系数 =∫刂C(p,w(x)p']*可C(p,)4(x)p1 平(x,)=了C(p,t)yn(x)p =∫∫C(p',)*C(p,)'∫y,*(x)w,x) C(p,t)=Jn*(x)Ψ(x,t) =∫∫C(p',)*C(p,t)p'dp6(p'-p) =∫C(p,)*C(p,t)p 5
Chap.4 The representation for the states and dynamical variable 5 在坐标表象中,体系的状态用波函数Ψ(x,t)描写,这样一个态如 何用动量为变量的波函数描写在前面几章中已经有所介绍。 动量本征函数: = = / 2 1 )( ipx p x e π ψ = 组成完备系,任一 状态Ψ可按其展开 ψ p )(),(),( dpxtpCtx ∫ =Ψ 展开系数 tpC = p Ψ ),()(*),( dxtxx ∫ ψ 假设 Ψ(x,t) 是归一化波函 数,则 C(p,t) 也是归一。 命题 证 Ψ= Ψ ),(),(*1 dxtxtx ∫ ψ p ψ p ])(),([*])(),([ dxdpxtpCpdxtpC ∫ ∫ ∫ = ′ ′ ′ dppdtpCtpC dxxx p p ),(*),( ′ ψψ )()(* ∫ ∫ ∫ = ′ ′ = ′ ′′ − ppdppdtpCtpC )(),(*),( ∫ ∫ δ ),(*),( dptpCtpC ∫ = (一)动量表象