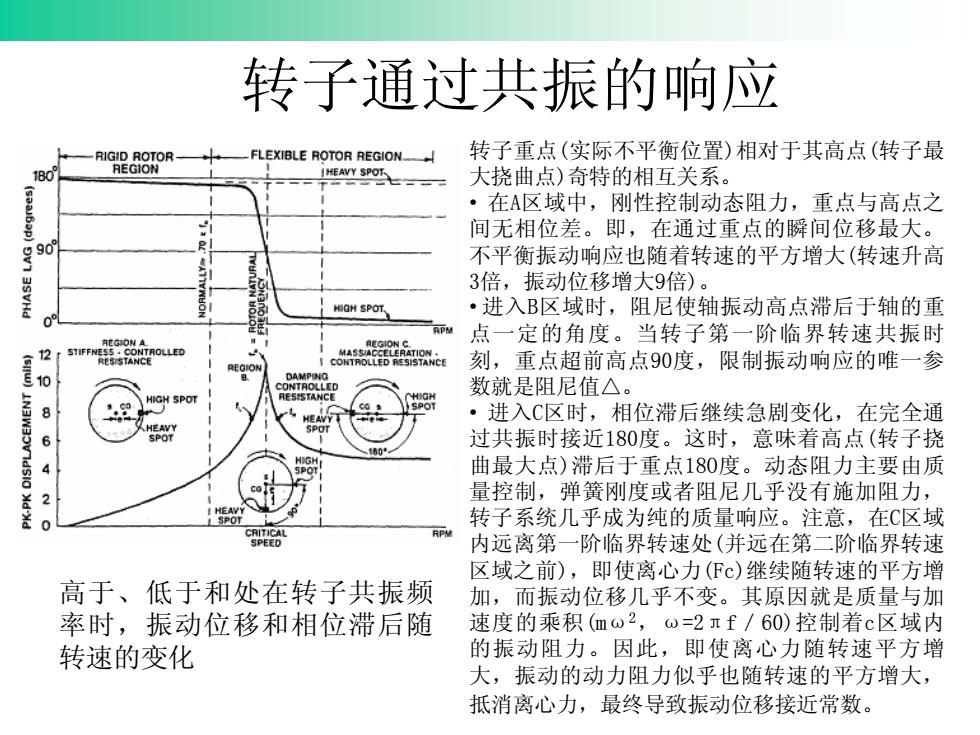
转子通过共振的响应转子重点(实际不平衡位置)相对于其高点(转子最FLEXIBLEROTORREGIONRIGIDROTORREGIONHEAVYSPOT1180大挠曲点)奇特的相互关系。(saaap)·在A区域中,刚性控制动态阻力,重点与高点之3间无相位差。即,在通过重点的瞬间位移最大。D90S不平衡振动响应也随着转速的平方增大(转速升高3倍,振动位移增大9倍。HOR·进入B区域时,阻尼使轴振动高点滞后于轴的重HIGH SPOT,o0点一定的角度。当转子第一阶临界转速共振时REGIONAREGIONCTROLLED12刻,重点超前高点90度,限制振动响应的唯一参RESISTANCECONTROLLED RESISTANCEREGIOI10DAMPNO数就是阻尼值△。SONTROLLEESESTANCHIGHSPOT8.90·进入C区时,相位滞后继续急剧变化,在完全通HEAVHEASPO6SPOT过共振时接近180度。这时,意味着高点(转子挠1曲最大点)滞后于重点180度。动态阻力主要由质4R0量控制,弹簧刚度或者阻尼几乎没有施加阻力,2HEA转子系统几乎成为纯的质量响应。注意,在C区域RPMCA内远离第一阶临界转速处(并远在第二阶临界转速SPEED区域之前),即使离心力(Fc)继续随转速的平方增高于、低于和处在转子共振频加,而振动位移几乎不变。其原因就是质量与加速度的乘积(mの2,の=2元f/60)控制着c区域内率时,振动位移和相位滞后随的振动阻力。因此,即使离心力随转速平方增转速的变化大,振动的动力阻力似乎也随转速的平方增大,抵消离心力,最终导致振动位移接近常数
高于、低于和处在转子共振频 率时,振动位移和相位滞后随 转速的变化 转子通过共振的响应 转子重点(实际不平衡位置)相对于其高点(转子最 大挠曲点)奇特的相互关系。 • 在A区域中,刚性控制动态阻力,重点与高点之 间无相位差。即,在通过重点的瞬间位移最大。 不平衡振动响应也随着转速的平方增大(转速升高 3倍,振动位移增大9倍)。 • 进入B区域时,阻尼使轴振动高点滞后于轴的重 点一定的角度。当转子第一阶临界转速共振时 刻,重点超前高点90度,限制振动响应的唯一参 数就是阻尼值△。 • 进入C区时,相位滞后继续急剧变化,在完全通 过共振时接近180度。这时,意味着高点(转子挠 曲最大点)滞后于重点18O度。动态阻力主要由质 量控制,弹簧刚度或者阻尼几乎没有施加阻力, 转子系统几乎成为纯的质量响应。注意,在C区域 内远离第一阶临界转速处(并远在第二阶临界转速 区域之前),即使离心力(Fc)继续随转速的平方增 加,而振动位移几乎不变。其原因就是质量与加 速度的乘积(mω2,ω=2πf/60)控制着c区域内 的振动阻力。因此,即使离心力随转速平方增 大,振动的动力阻力似乎也随转速的平方增大, 抵消离心力,最终导致振动位移接近常数
共振问题的识别1:高度定向的振动在HVA三个方向上,共振方向的振动比其它两个方向的振动大5到15倍。许多专家诊断软件系统利用这一事实查找可能的共振。这也就是为什么在定期的预测维修巡检中要在每个轴承的所有三个方向测量振动的重要性。2共振测量方向的相位特性在机器共振方向,相位随转速变化很大,在共振频率处相位将变化90度,通过共振时相位几乎变化180度,与存在的阻尼值有关。另一方面,非共振测量方向相位的变化可能很小,因为它们未经受共振。3:与共振测量方向垂直方向的相位差如果一个径向方向共振,振动传感器转过90度测量其他方向的振动时,相位差将接近或0度或180度,不像在不平衡占优势的情况中那样,相位差约90度。即,如果水平方向共振,则水平方向相位与垂直方向相位,或是相等或是相差约180度。这是由于共振时引入附加的90度相位变化。在任何一种情况下,水平与垂直方向相位差0度或180度代表共振高度定向的振动特性(或者偏心)
共振问题的识别 1.高度定向的振动 在HVA三个方向上,共振方向的振动比其它两个方向的振动大5到15倍。 许多专家诊断软件系统利用这一事实查找可能的共振。这也就是为什么在定 期的预测维修巡检中要在每个轴承的所有三个方向测量振动的重要性。 2.共振测量方向的相位特性 在机器共振方向,相位随转速变化很大,在共振频率处相位将变化90 度,通过共振时相位几乎变化180度,与存在的阻尼值有关。 另一方面,非共振测量方向相位的变化可能很小,因为它们未经受共 振。 3.与共振测量方向垂直方向的相位差 如果一个径向方向共振,振动传感器转过90度测量其他方向的振动时, 相位差将接近或0度或180度, 不像在不平衡占优势的情况中那样,相位差 约90度。即,如果水平方向共振,则水平方向相位与垂直方向相位,或是相 等或是相差约18O度。这是由于共振时引入附加的90度相位变化。 在任何一种情况下,水平与垂直方向相位差0度或180度代表共振高度定 向的振动特性(或者偏心)
共振问题的识别4.出现共振时的频率共振不仅发生在1X转速频率。它可以是对与自振频率一致的任何强迫振动频率的响应。这些情况下,比较某个方向某个频率的振动幅值和其他两个正交方向的相同频率的振动幅值很有用。如果共振,这个频率应该比这三个方向之一的任何振动频率更高。这个频率可能是4X、5X、或6X转速频率处的振动尖峰(或者其至更高频率),这些频率也可能是叶片通过频率(BPF),轴承故障频率,齿轮啮合频率(GMF),或者其至机器松动状态的振动频率。请记住,共振频率幅值=静振幅×放大因子Q。5.共振体过大的振动不仅必须研究机器转子(旋转件)的共振,还应研究激起支承框架,基础其至连接管道的自振频率。疲劳故障经常发生在连接框架或管道上,这是因为它们对来自机器的强迫振动频率发生共振。解决问题的方法一般是,降低机器中强迫振动频率源:把共振框架体与机器隔离:改变转子转速或者改变框架体本身的自振频率
共振问题的识别 4.出现共振时的频率 共振不仅发生在1X转速频率。它可以是对与自振频率一致的任何强迫振 动频率的响应。这些情况下,比较某个方向某个频率的振动幅值和其他两个 正交方向的相同频率的振动幅值很有用。如果共振,这个频率应该比这三个 方向之一的任何振动频率更高。这个频率可能是4X、5X、或6X转速频率处的 振动尖峰(或者甚至更高频率),这些频率也可能是叶片通过频率(BPF),轴 承故障频率,齿轮啮合频率(GMF),或者甚至机器松动状态的振动频率。请 记住,共振频率幅值=静振幅×放大因子Q。 5.共振体过大的振动 不仅必须研究机器转子(旋转件)的共振,还应研究激起支承框架,基础 甚至连接管道的自振频率。疲劳故障经常发生在连接框架或管道上,这是因 为它们对来自机器的强迫振动频率发生共振。解决问题的方法一般是,降低 机器中强迫振动频率源;把共振框架体与机器隔离;改变转子转速或者改变 框架体本身的自振频率
解决共振问题的措施a.改变刚性增强轴承座或框架的刚性,夹紧地脚,消除加垫引起的变形或采用减小轴承间隙有时可解决共振问题(这些措施将通过影响刚性,从而影响固有频率)。b.增加或减掉重量(质量)虽然改变刚性通常比较简单和便宜,但是增加或减掉重量也改变自振频率。然而,这种效果只是局部共振时才有效。c.采取隔振措施对外部设备振动激起机器的一个固有频率产生共振时,隔振可能很有效。例如,设计1780rpm运转的泵,有一个750cpm的固有频率,如果附近有一台以750rpm运转的大风机不平衡,则该泵可能出现共振问题。这种情况下,可把泵与风机隔离,动平衡风机,或者把泵本身与地板隔离
解决共振问题的措施 a.改变刚性 增强轴承座或框架的刚性,夹紧地脚,消除加垫引起的变形或 采用减小轴承间隙有时可解决共振问题(这些措施将通过影响刚性, 从而影响固有频率)。 b.增加或减掉重量(质量) 虽然改变刚性通常比较简单和便宜,但是增加或减掉重量也改 变自振频率。然而,这种效果只是局部共振时才有效。 c.采取隔振措施 对外部设备振动激起机器的一个固有频率产生共振时,隔振可 能很有效。 例如,设计1780rpm运转的泵,有一个750cpm的固有频率,如果 附近有一台以75Orpm运转的大风机不平衡,则该泵可能出现共振问 题。这种情况下,可把泵与风机隔离,动平衡风机,或者把泵本身 与地板隔离
解决共振问题的措施e:安装调谐阻尼器(振动减振器):在其他技术措施无法实施或者不能有效把振动降到可接受的水平时,有时可以安装调谐阻尼器。然而,这种调谐阻尼器在只有一个占优势的频率引起过大的振动,并且这个频率就是调谐阻尼器的固有频率的情况下才有效。调谐阻尼器可以设计成固有频率等于故障频率,并与共振的振动响应相位差180度,它将有效地“抵消掉”共振。f.精确的动平衡:因为共振幅值等于强迫振动幅值×放大因子,利用减小强迫振动源(例如,不平衡)可以减小共振幅值。如果通过动平衡处理,可以明显减小动平衡强迫振动幅值,即使处于共振时,其共振振幅可以减小到可以接受的程度
解决共振问题的措施 e.安装调谐阻尼器(振动减振器): 在其他技术措施无法实施或者不能有效把振动降到可接受的水 平时,有时可以安装调谐阻尼器。然而,这种调谐阻尼器在只有一 个占优势的频率引起过大的振动,并且这个频率就是调谐阻尼器的 固有频率的情况下才有效。调谐阻尼器可以设计成固有频率等于故 障频率,并与共振的振动响应相位差180度,它将有效地 “抵消掉 ” 共 振。 f.精确的动平衡: 因为共振幅值等于强迫振动幅值×放大因子,利用减小强迫振 动源(例如,不平衡)可以减小共振幅值。如果通过动平衡处理,可 以明显减小动平衡强迫振动幅值,即使处于共振时,其共振振幅可 以减小到可以接受的程度