阳台现之华航 antai Institute of Technology 二阶线性系统的控制 原城台文家之维单能 2.二阶系统的控制 设计一个控制器使得系统具有我们期望的特性。 设计目标: •稳定:stabilize the syatem. 位置校正:regulate the system about some design point. 轨迹跟踪:follow a given class of command signals. 抗千扰:reduce response to disturbances
2. 二阶系统的控制 设计一个控制器使得系统具有我们期望的特性。 设计目标: •稳定: stabilize the syatem. •位置校正: regulate the system about some design point. •轨迹跟踪: follow a given class of command signals. •抗干扰: reduce response to disturbances. 二阶线性系统的控制
细台形2幸院 antai Institute of Technology 二阶线性系统的控制 原城台好火维年馆 位置调节系统:这种系统只是试图保持质量块在一个固定 的位置,而不考虑质量块受到的干扰力, 驱动器给质量块施加一个力f: m成+bx+kx=f升 我们给出一个控制律,它是传感器反馈的函数: f=-kpx-k, System 0000
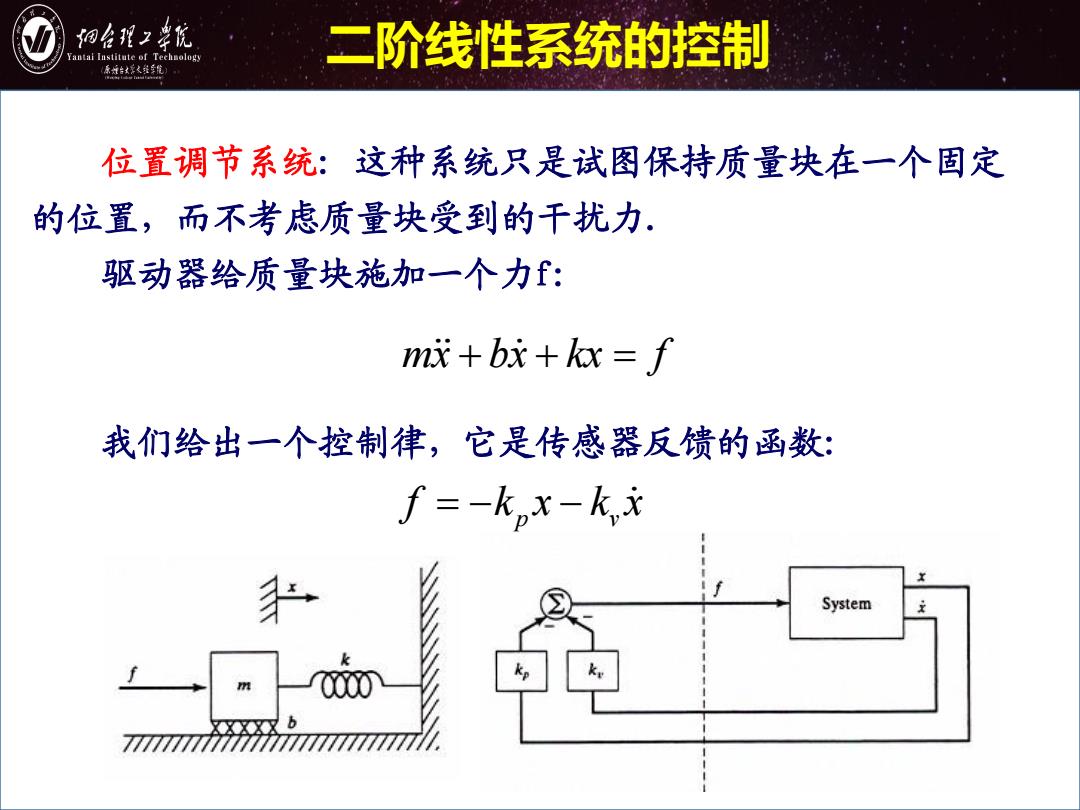
位置调节系统: 这种系统只是试图保持质量块在一个固定 的位置,而不考虑质量块受到的干扰力. 驱动器给质量块施加一个力f: 我们给出一个控制律,它是传感器反馈的函数: mx bx kx f p v f k x k x 二阶线性系统的控制
细台程2幸优 antai Institute of Technology 二阶线性系统的控制 原城台好火维年院 闭环系统的动力学方程如下: m成+br+kax=-k,x-k,天 m+b+k)+(k+k)x=mx+b+kx=0 通过设定控制增益'和b',可以使闭环系统呈 现任何期望的二阶系统特性。通过选择增益获得临 界阻尼b'=2√mk'和某种直接由k'给出的期望闭 环刚度
闭环系统的动力学方程如下: 通过设定控制增益 和 , 可以使闭环系统呈 现任何期望的二阶系统特性。通过选择增益获得临 界阻尼 和某种直接由 给出的期望闭 环刚度。 ( ) ( ) 0 m v p x bk x k k x mxb x k x m p v x bx kx k x k x b 2 mk k 二阶线性系统的控制 b k
细台程2幸优 antai Institute of Technology 二阶线性系统的控制 原城台家父维年馆 例子:如果质量块一弹簧系统的各个参数分别 为m=1,b=1,k=1,找到增益k。,k,,使得闭环刚度为 16.0,且闭环系统处于临界阻尼状态。 解:如果希望k'等于16.0,那么为了达到临界阻尼, 则需要: b'=2√mk'=8.0 因为 b=1,k=1 所以有 k。=15.0 k,=7.0
例 子 : 如 果 质 量 块 - 弹 簧 系 统 的 各 个 参 数 分 别 为 , 找到增益 ,使得闭环刚度为 16.0,且闭环系统处于临界阻尼状态。 解:如果希望 等于 16.0 , 那么为了达到临界阻尼, 则需要: 因为 所以有 b 1, k 1 , p v k k b 2 mk 8.0 k 15.0 7.0 p v k k m 1, b 1, k 1 二阶线性系统的控制