CHAPTER 11 STRAIN ENERGY Summary The energy stored within a material when work has been done on it is termed the strain energy or resilience, i.e. strain energy work done In general there are four types of loading which can be applied to a material: 1.Direct load (tension or compression) CP2ds P2L Strain energy U= 2AE or 2AE o2AL a2 2E=2E :×volume of bar 2.Shear load fo2ds 02L Strain energy U= 2AG or 2AG 2G×AL= 2G x volume of bar 3.Bending M2ds M2L Strain energy U= or 2EI 2EI if M is constant 4.Torsion "T2ds T2L Strain energy U= or 2GJ 2GJ if T is constant From 1 above,the strain energy or resilience when the tensile stress reaches the proof stress p,i.e.the proof resilience,is x volume of bar 2E and the modulus of resilience is 2E The strain energy per unit volume of a three-dimensional principal stress system is 1 U=2E[oi+吃+号-2w(o102+a203+031】 254
CHAPTER 11 STRAIN ENERGY Summary The energy stored within a material when work has been done on it is termed the strain energy or resilience, i.e. strain energy = work done In general there are four types of loading which can be applied to a material: 1. Direct load (tension or compression) 1% P2 L or - 2 AE Strain energy U = O~AL a2 =-- -- x volume of bar 2E 2E 2. Shear load j‘g or - QZL 2 AG Strain energy U = 72 T2 2G 2G Strain energy U = 1:; - or - if M is constant = - x AL = - x volume of bar 3. Bending M2L 2 EZ 4. Torsion if T is constant 1; T2L or - 2GJ Strain energy U = - From 1 above, the strain energy or resilience when the tensile stress reaches the proof stress ap, i.e. the proof resilience, is - 4 x volume of bar 2E and the modulus of resilience is - 0; 2E The strain energy per unit volume of a three-dimensional principal stress system is 1 2E U =--a:+a 254

Strain Energy 255 The volumetric or "dilatational"strain energy per unit volume is then -2[o,+2+P门 6E and the shear,or"distortional",strain energy per unit volume is 12G[o1-2P+(o2-032+(a3-1}] 1 The maximum instantaneous stress in a uniform bar caused by a weight Wfalling through a distance h on to the bar is given by (+] The instantaneous extension is then given by 6-% If this is small compared to the height h,then 2WEh AL For any shock-loaded system the instantaneous deflection is given by -±(+】 where 6,is the deflection under an equal static load. Castigliano's first theorem for deflection states that: If the total strain energy expressed in terms of the external loads is partially differentiated with respect to one of the loads the result is the deflection of the point of application of that load and in the direction of that load (see Examples 11.5 and 11.6): aU i.e. Deflection in direction of In applications where bending provides practically all of the strain energy, CM2ds [MOM =aw]2EI ds EI aW This is sometimes written in the form 6= Mm E where m OM aw the bending moment resulting from a unit load only in the place of W.This method of solution is then termed the unit load method
Strain Energy 255 The volumetric or “dilatational” strain energy per unit volume is then and the shear, or “distortional”, strain energy per unit volume is 1 - [(ai- 02)2 + (02 - 4 + (03 - (71)21 12G The maximum instantaneous stress in a uniform bar caused by a weight W falling through a distance h on to the bar is given by 2 WEh A- The instantaneous extension is then given by dL 6=- E If this is small compared to the height h, then //2 WEh\ For any shock-loaded system the instantaneous deflection is given by 6 = 6, [ 1 * J( 1 +;)I where 6, is the deflection under an equal static load. Castigliano’sfirst theorem for tiefiction states that: If the total strain energy expressed in terms of the external loads is partially diyerentiated with respect to one of the loads the result is the defection of the point of application of that load and in the direction of that load (see Examples 11.5 and 11.6): au aw i.e. Deflection in direction of W = - = 6 In applications where bending provides practically all of the strain energy, This is sometimes written in the form 8M where m = ~ = the bending moment resulting from a unit load only in the place of W. This method of solution is then termed the unit load method. aw
256 Mechanics of Materials Castigliano's theorem also applies to angular movements: If the total strain energy expressed in terms of the external moments be partially differentiated with respect to one of the moments,the result is the angular deflection in radians of the point of application of that moment and in its direction 0-EI OM where M;is the actual or imaginary moment at the point where 0 is required. Defections due to shear Beam loading Shear deflection Rectangular-section beam I-section beam 6WL WL Cantilever-concentrated end load W' 5AG AG 3wL2 wL2 WL Cantilever-u.d.I. 5AG 2AG2AG Simply supported 3WL WL beam-central concentrated load W 10AG 4AG Simply supported beam-concentrated 6Wab load dividing span SAGL into lengths a and b 3wL2 wL2 WL Simply supported 8AG8AG beam-u.d.l. 20AG Introduction Energy is normally defined as the capacity to do work and it may exist in any of many forms, e.g.mechanical(potential or kinetic),thermal,nuclear,chemical,etc.The potential energy ofa body is the form of energy which is stored by virtue of the work which has previously been done on that body,e.g.in lifting it to some height above a datum.Strain energy is a particular form of potential energy which is stored within materials which have been subjected to strain, i.e.to some change in dimension.The material is then capable of doing work,equivalent to the amount of strain energy stored,when it returns to its original unstrained dimension. Strain energy is therefore defined as the energy which is stored within a material when work has been done on the material.Here it is assumed that the material remains elastic whilst work is done on it so that all the energy is recoverable and no permanent deformation occurs due to yielding of the material, i.e. strain energy U work done Thus for a gradually applied load the work done in straining the material will be given by the shaded area under the load-extension graph of Fig.11.1. U=Pδ
256 Mechanics of Materials Beam loading Castigliano’s theorem also applies to angular movements: If the total strain energy expressed in terms of the external moments be partially diferentiated with respect to one of the moments, the result is the angular deflection in radians of the point of application of that moment and in its direction M 8M O= --d~ 1.1 aMi where Mi is the actual or imaginary moment at the point where 0 is required, Deflections due to shear Shear deflection Rectangular-section beam I-section beam 6 WL WL Cantileverxoncentrated end load W’ Cantilever-u.d.1. 3WLZ 5AG __ Simply supported 3WL beam -central concentrated load W Simply supported beam - concentrated load dividing span into lengths a and b Simply supported beam-u.d.1. 6 Wab 5AGL ~ wL2 WL 2AG ZAG Idlo WL 3wL2 20AG __ wL2 WL 8AG 8AG Introduction Energy is normally defined as the capacity to do work and it may exist in any of many forms, e.g. mechanical (potential or kinetic), thermal, nuclear, chemical, etc. The potential energy of a body is the form of energy which is stored by virtue of the work which has previously been done on that body, e.g. in lifting it to some height above a datum. Strain energy is a particular form of potential energy which is stored within materials which have been subjected to strain, i.e. to some change in dimension. The material is then capable of doing work, equivalent to the amount of strain energy stored, when it returns to its original unstrained dimension. Strain energy is therefore deJined as the energy which is stored within a material when work has been done on the material. Here it is assumed that the material remains elastic whilst work is done on it so that all the energy is recoverable and no permanent deformation occurs due to yielding of the material, i.e. strain energy U = work done the shaded area under the load-extension graph of Fig. 11.1. Thus for a gradually applied load the work done in straining the material will be given by U=iPG
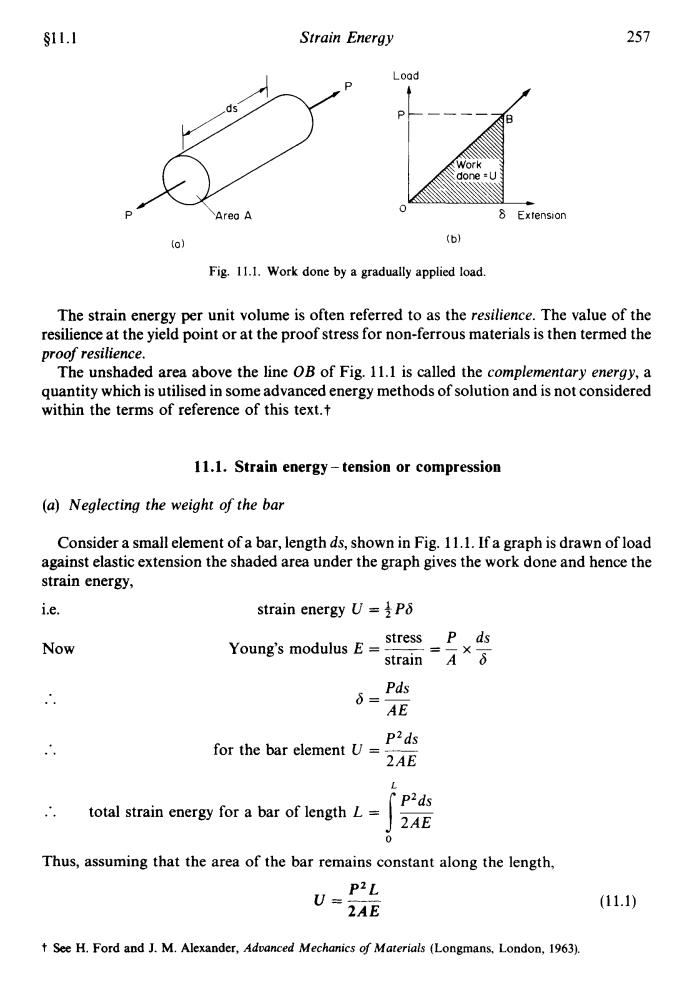
S11.1 Strain Energy 257 Load Work done±U Areo A 8 Extension (o) (b】 Fig.11.1.Work done by a gradually applied load. The strain energy per unit volume is often referred to as the resilience.The value of the resilience at the yield point or at the proof stress for non-ferrous materials is then termed the proof resilience. The unshaded area above the line OB of Fig.11.1 is called the complementary energy,a quantity which is utilised in some advanced energy methods of solution and is not considered within the terms of reference of this text.t 11.1.Strain energy-tension or compression (a)Neglecting the weight of the bar Consider a small element of a bar,length ds,shown in Fig.11.1.If a graph is drawn of load against elastic extension the shaded area under the graph gives the work done and hence the strain energy, i.e. strain energy U=Pδ stress P ds Now Young's modulus E= strain=A×8 Pds 6= AE P2ds for the bar element U= 2AE f p2ds total strain energy for a bar of length L= 2AE 0 Thus,assuming that the area of the bar remains constant along the length, P2L U= 2AE (11.1) t See H.Ford and J.M.Alexander,Advanced Mechanics of Materials (Longmans.London,1963)
$11.1 Strain Energy 257 Load P P 6 Extension Fig. 11.1. Work done by a gradually applied load. The strain energy per unit volume is often referred to as the resilience. The value of the resilience at the yield point or at the proof stress for non-ferrous materials is then termed the proof resilience. The unshaded area above the line OB of Fig. 11.1 is called the complementary energy, a quantity which is utilised in some advanced energy methods of solution and is not considered within the terms of reference of this text. t 11.1. Strain energy - tension or compression (a) Neglecting the weight of the bar Consider a small element of a bar, length ds, shown in Fig. 11.1. If a graph is drawn of load against elastic extension the shaded area under the graph gives the work done and hence the strain energy, i.e. strain energy U = fP6 Now .. stress P ds strain - A s Young’s modulus E = - - - Pds a=- AE P2ds for the bar element U = __ 2 AE .. L 1E :. total strain energy for a bar of length L = 0 Thus, assuming that the area of the bar remains constant along the length, P2 L u=-- 2AE (11.1) t See H. Ford and J. M. Alexander, Advanced Mechanics of Materials (Longmans, London, 1963)
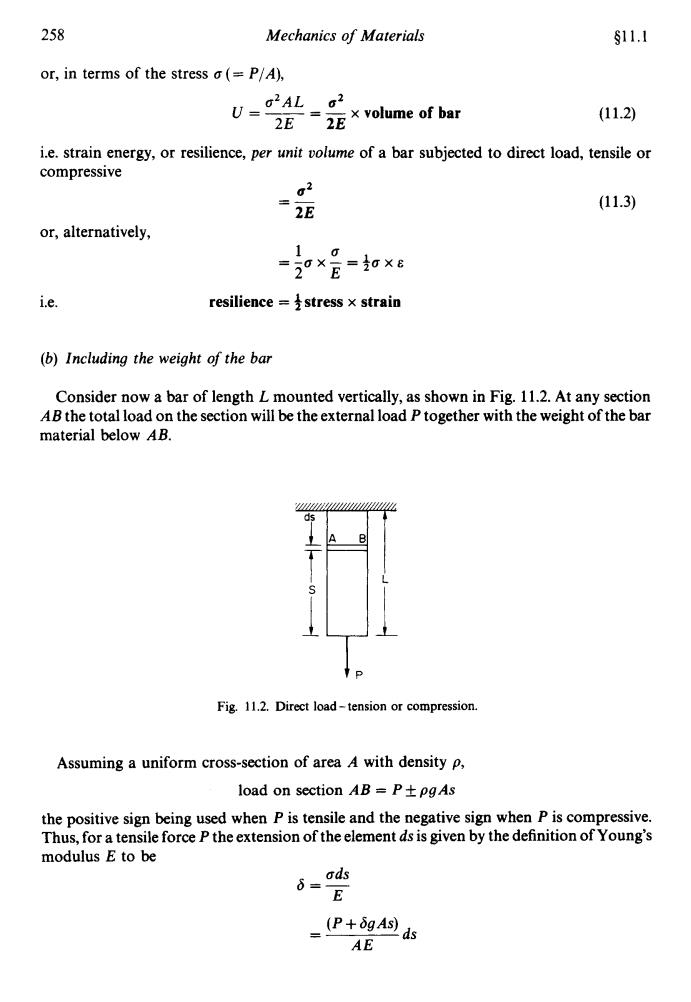
258 Mechanics of Materials §11.1 or,in terms of the stress a(=P/A), U=gAL。g2 2E=2E×volume of bar (11.2) i.e.strain energy,or resilience,per unit volume of a bar subjected to direct load,tensile or compressive 02 (11.3) 2E or,alternatively, 10 =50X5=0Xe i.e. resilience =stress x strain (b)Including the weight of the bar Consider now a bar of length L mounted vertically,as shown in Fig.11.2.At any section AB the total load on the section will be the external load P together with the weight of the bar material below AB. LEEC666660066602206666 ds Fig.11.2.Direct load-tension or compression. Assuming a uniform cross-section of area A with density p, load on section AB P+pgAs the positive sign being used when P is tensile and the negative sign when P is compressive. Thus,for a tensile force P the extension of the element ds is given by the definition of Young's modulus E to be 6=ads E _P+g4的d5 AE
258 Mechanics of Materials $11.1 or, in terms of the stress o (= P/A), 02AL s2 2E 2E u=- = - x volume of bar (11.2) i.e. strain energy, or resilience, per unit volume of a bar subjected to direct load, tensile or compressive a' 2E =- (11.3) or, alternatively, i.e. resilience = istress x strain (b) Including the weight of the bar Consider now a bar of length L mounted vertically, as shown in Fig. 11.2. At any section AB the total load on the section will be the external load P together with the weight of the bar material below AB. Fig. 11.2. Direct load - tension or compression. Assuming a uniform cross-section of area A with density p, load on section AB = P pgAs the positive sign being used when P is tensile and the negative sign when P is compressive. Thus, for a tensile force P the extension of the element ds is given by the definition of Young's modulus E to be ods 6=- E - (' + 'g As) ds - AE