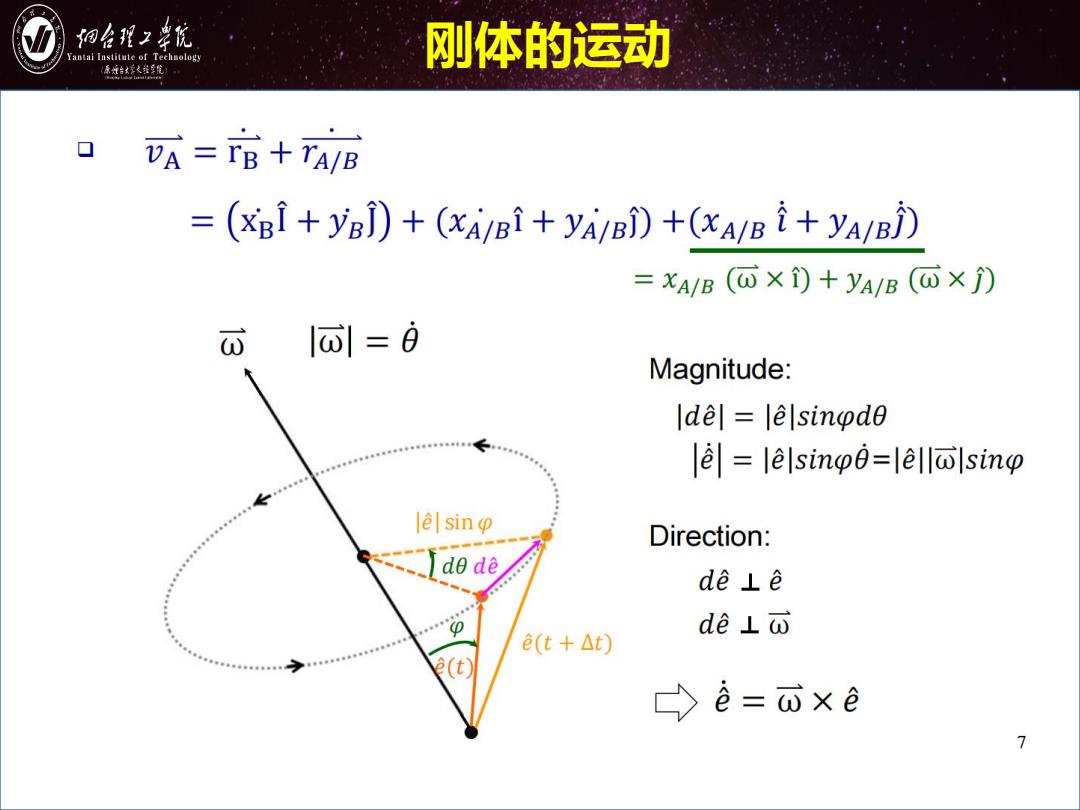
阳台理:华优 antai Institute of Technology 刚体的运动 原城台好火维年航 A=馆+AB =(xB1+yB])+(xi/Bi+yi/Bi)+(xA/B i+yA/Bj) =xA/B(⑥×)+yA/B(而×) 1o1=0 Magnitude: ldel lelsingde e=lelsinge=lellulsin lel sin Direction: de⊥e de⊥ e(t+△t) 〉è=0×e 7
7 刚体的运动
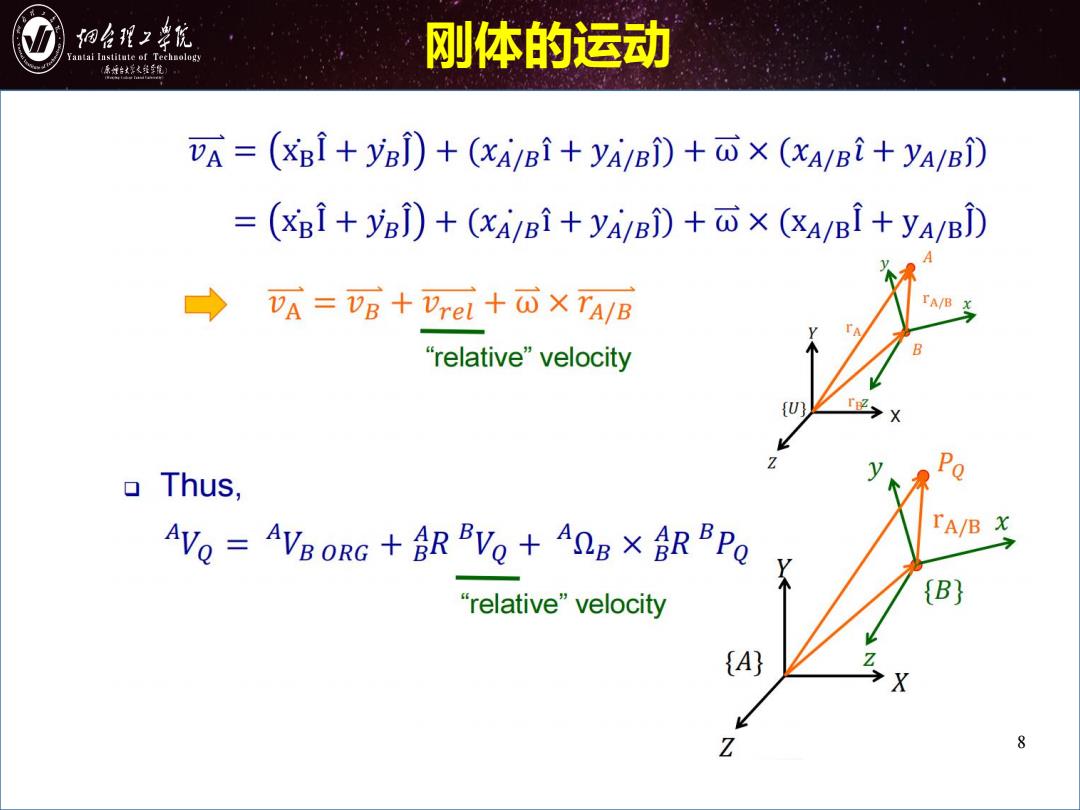
细台形2幸院 antai Institute of Technology 刚体的运动 原城台家父维缆 VA=(xBi+yB])+(xi/Bi+yi/Bi)+x (xA/Bi+yA/B) =(XB1+yB)+(xA/B1+yABi)+而×(&A/Bi+yA/B) → a=店+re+西XTA/B A/B “relative”velocity o Thus, Po AVo AVB ORG+R Vo+AQB xR Po TA/B x “relative”velocity (B) (A} X Z 8
8 刚体的运动
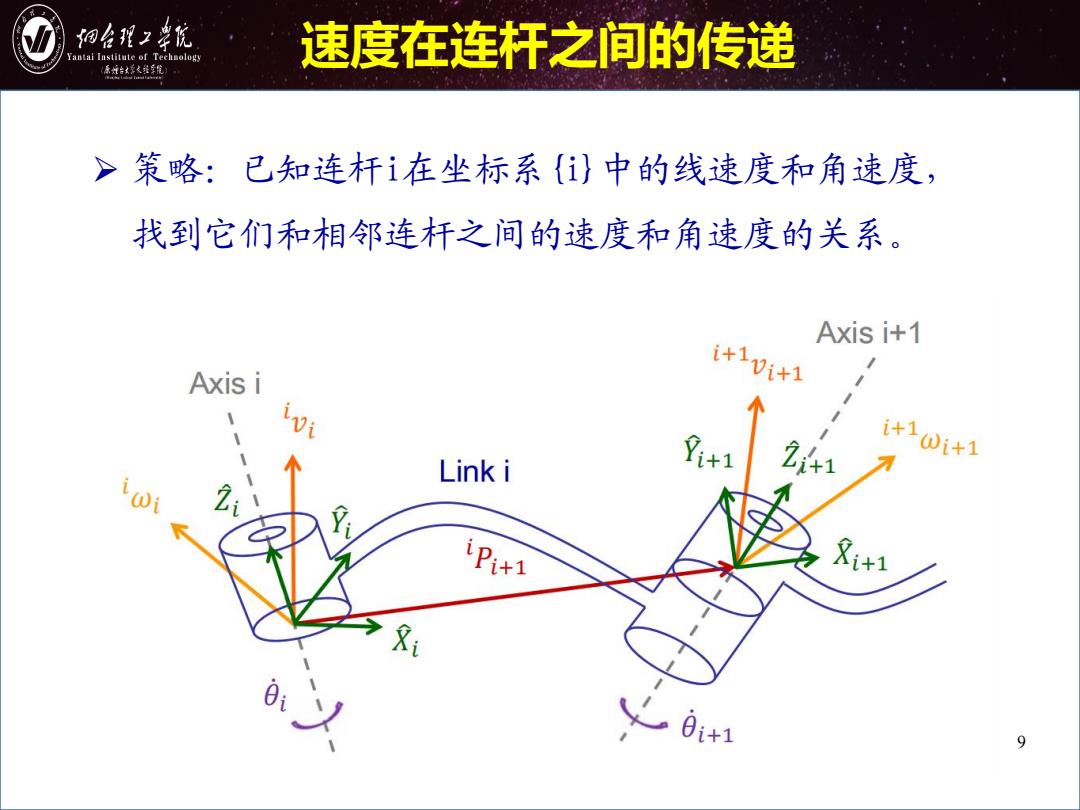
细台程2幸优 antai Institute of Technology 速度在连杆之间的传递 原城台好火维年院 >策略:已知连杆i在坐标系{}中的线速度和角速度, 找到它们和相邻连杆之间的速度和角速度的关系。 Axis i+1 Axis i i*10*1 i01 2+1 1+1D1+1 Link i iPirl Xi+1 0 L0+1 9
9 速度在连杆之间的传递 Ø 策略:已知连杆i在坐标系{i}中的线速度和角速度, 找到它们和相邻连杆之间的速度和角速度的关系
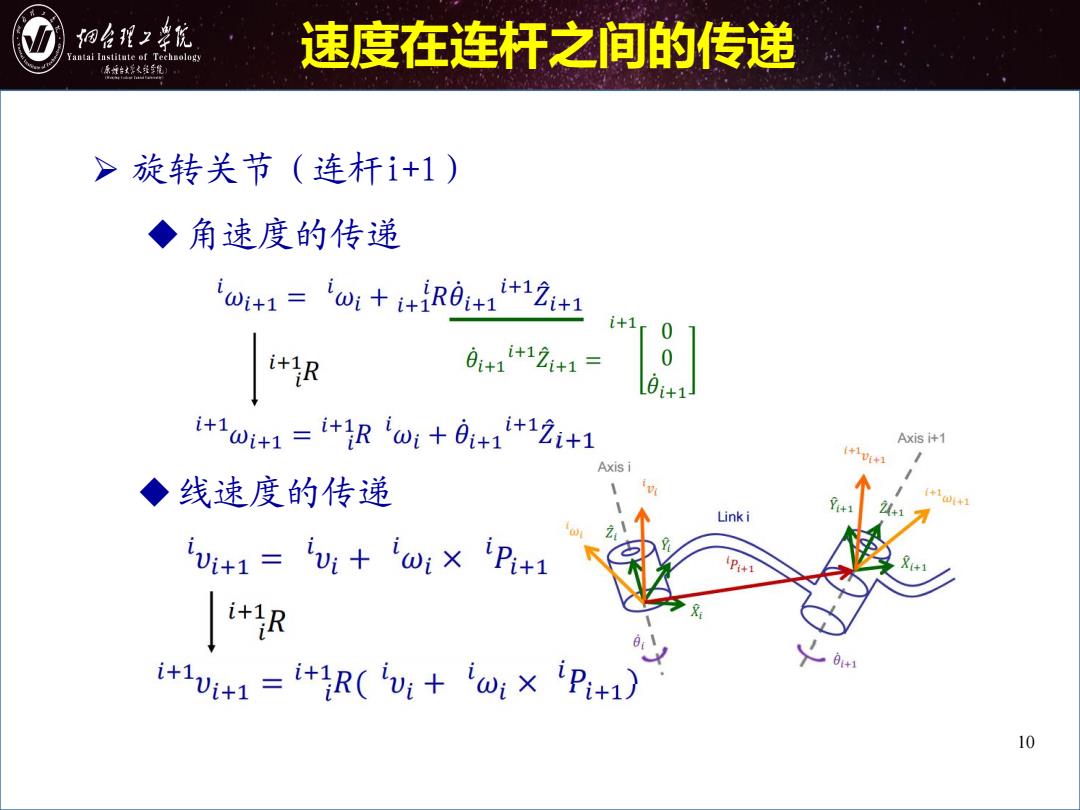
细台程2幸优 Yantai Institute of Technology 速度在连杆之间的传递 原城台文家之维单能 >旋转关节(连杆i+1) ◆角速度的传递 w+1=iw+i+iR0+1+12+ i+1 0 0+1+12+1= 0 0+1 +1ω+1=i+Rw:+0+1+12+1 Axis i+1 Axis i +1*1 ◆线速度的传递 *1 2认17 +10*1 Linki vi+1=v+ωi×P+1 P*1 +R i+1v+1=i+1R(u:+w:×P+1) 0+1 10
10 速度在连杆之间的传递 Ø 旋转关节(连杆i+1) u角速度的传递 u线速度的传递
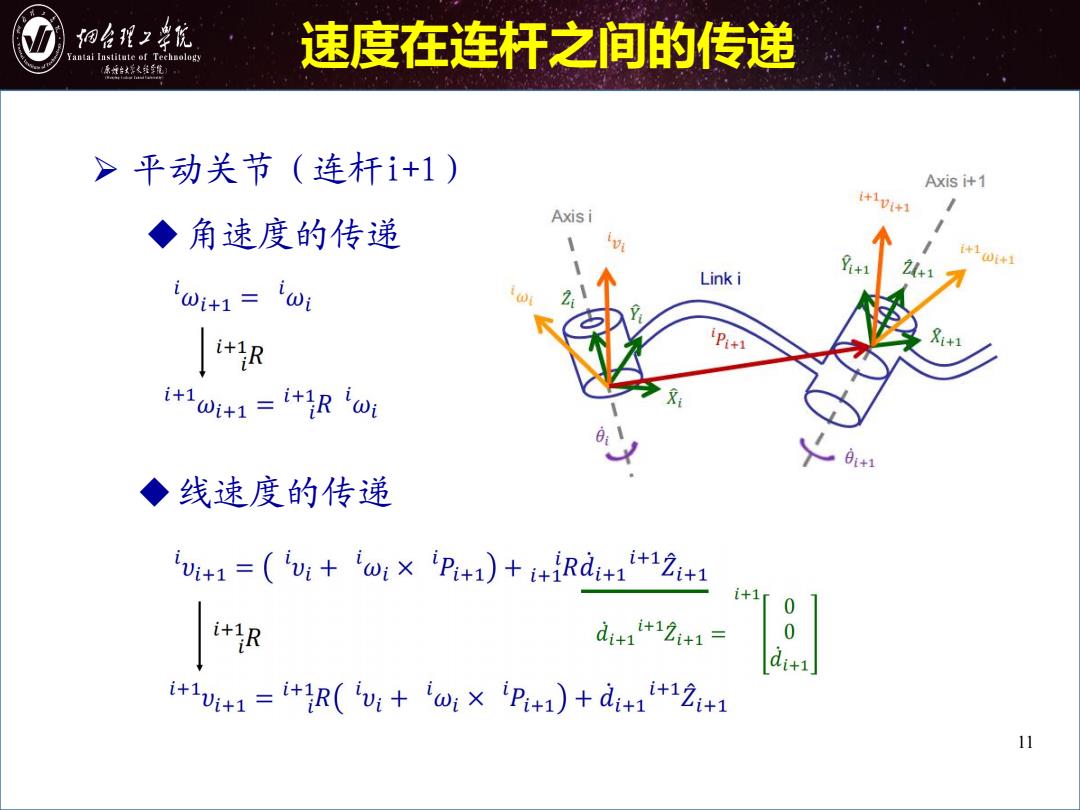
细台程2幸优 Yantai Institute of Technology 速度在连杆之间的传递 原城台大家之维单能 >平动关节(连杆i+1) Axis i+1 Axis i *10*1 ◆角速度的传递 2*17 计10*1 twi=wr Link i |+R i+ i+1w+1=i+Rω 0+1 ◆线速度的传递 u+1=(+w×ip+i)+i+iRd+1+12+1 0 R d+112+1= 0 i+1u+1=i+R(u+w×P+1)+d+1+12+1 11
11 速度在连杆之间的传递 Ø 平动关节(连杆i+1) u角速度的传递 u线速度的传递