ME369-系统棋型、分析与控制 9.1控制系统的状态空间分析 School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 引例1] R ☐000m duc=i dt di +Ri+uc =u School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 1
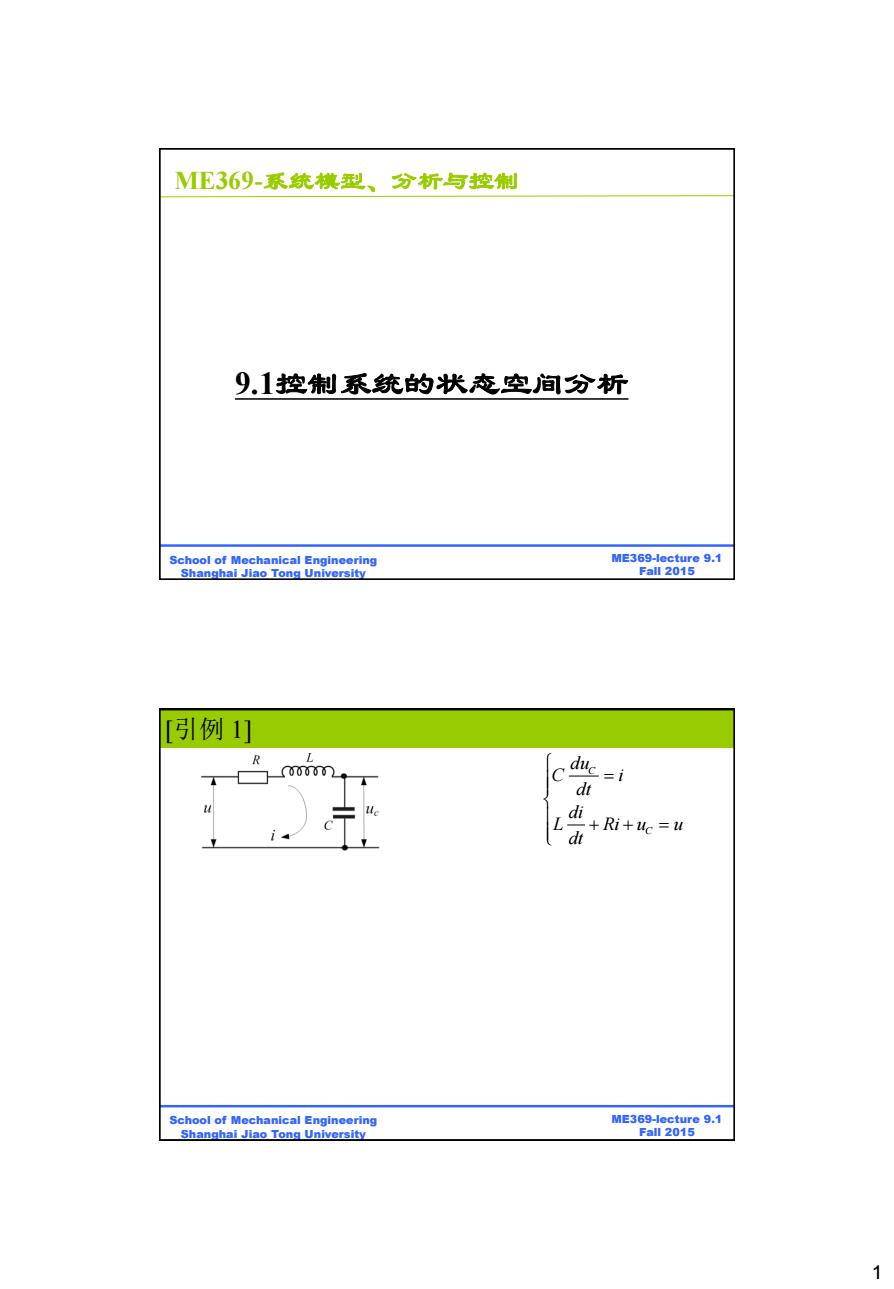
1 ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 9.1控制系统的状态空间分析 ME369-系统模型、分析与控制 ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [引例 1] Ri u u dt di L i dt du C C C

状态空间表达 D ()=Ax(1)+Bu(t) y(t)=Cx(t)+Du(t) School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 例1] M d +b+e=0) dt x(t)=x(t) M x2(t)=x(t) L白b y=x School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 2
2 ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 状态空间表达 x Ax Bu ( ) ( ) ( ) t t t y Cx Du ( ) ( ) ( ) t t t ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [例1] 2 2 ( ) d x dx M b kx u t dt dt 1 x t x t ( ) ( ) 2 x t x t ( ) ( ) 1 y x
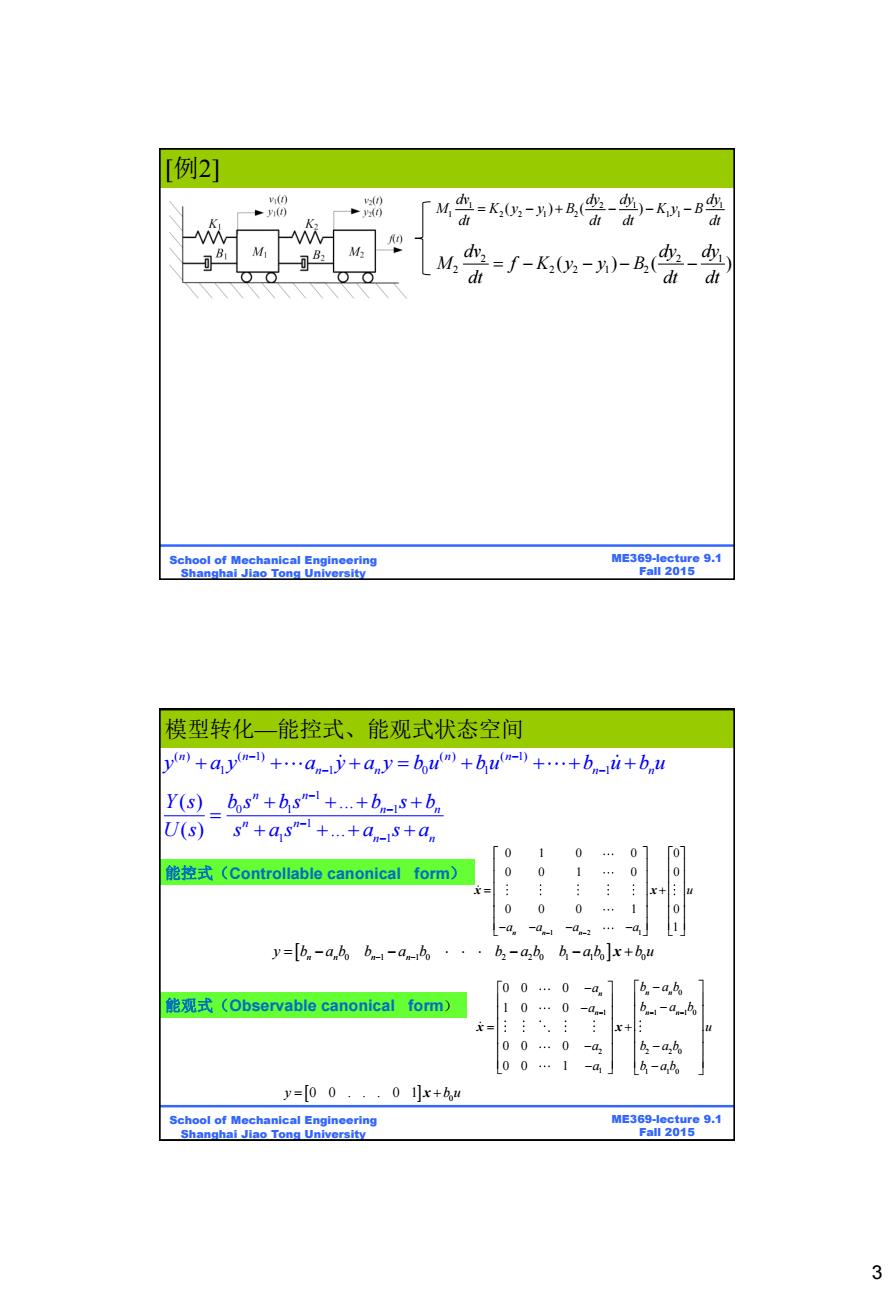
[例2] (0 「M血=K,0,-y+B,_)-Ky-B血 =f-K0-y)B,(座-$ M2 dt dt dt School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 模型转化一能控式、 能观式状态空间 ym+ay-l+…an-少+any=btm+b4im-l+…+bni+b,u Y(s) bs”+bs"-1++bn-1S+ba U(s) s"+as+.+ars+an 0 1 0 07 能控式(Controllable canonical form) 0 0 1… 0 x+ 0 0:0 0 0… -0。-01-an-2… -a, 1 y=[b-a,bo b-ambo ···b2-a2b b-abo]x+bou 「00… 0 -a. 能观式(Observable canonical form) 10 0 -an-l -a bo 龙= 1+ 00.… 0 -4 b,-a,bo 00…1 a L点-ab y=[00,..0]x+u School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 3
3 ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 2 2 1 2 2 2 1 2 ( ) ( ) dv dy dy M f K y y B dt dt dt 1 2 1 1 1 2 2 1 2 1 1 ( ) ( ) dv dy dy dy M K y y B K y B dt dt dt dt [例2] ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 模型转化—能控式、能观式状态空间 ( ) ( 1) ( ) ( 1) 1 1 0 1 1 n n n n n n n n y a y a y a y b u b u b u b u 1 0 1 1 1 1 1 ( ) ... ( ) ... n n n n n n n n Y s b s b s b s b U s s a s a s a 1 2 1 0 1 0 0 0 0 0 1 0 0 0 0 0 1 0 1 n n n u a a a a x x y b a b b a b b a b b a b b u n n n n 0 1 1 0 2 2 0 1 1 0 0 x 0 1 1 1 0 2 2 2 0 1 1 1 0 0 0 0 1 0 0 0 0 0 0 0 1 n n n n n n a b a b a b a b u a b a b a b a b x x 0 y b u 0 0 . . . 0 1 x 能控式(Controllable canonical form) 能观式(Observable canonical form)
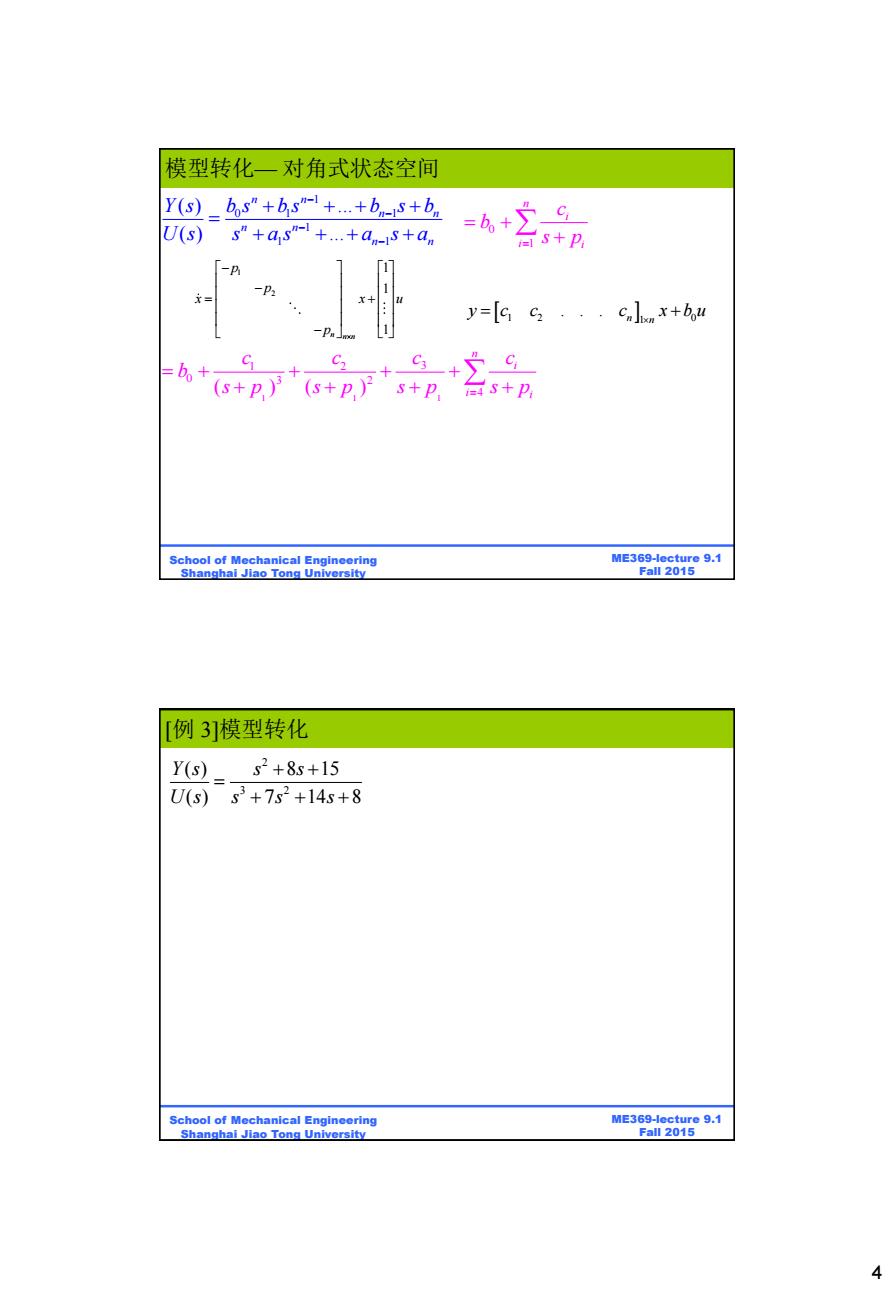
模型转化一对角式状态空间 Y(s)bos"+bs"+..+bs+b U(s) s"+as"+...+an-is+an -P -P2 i- x+ y=[9g2··clnx+bu 6o+ C +9 (s+P)3(s+p)2s+台s+ School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 例3]模型转化 Y(s) 52+8s+15 U(s)s3+7s2+145+8 School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 4
4 ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 1 0 1 1 1 1 1 ( ) ... ( ) ... n n n n n n n n Y s b s b s b s b U s s a s a s a 1 2 1 1 n 1 n n p p x x u p 1 2 0 1 ... n n y c c c x b u 1 1 1 1 2 3 0 3 2 ( ) ( ) 4 n i i i c c c c b s p s p s p s p 0 1 n i i i c b s p 模型转化— 对角式状态空间 ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [例 3]模型转化 2 3 2 ( ) 8 15 ( ) 7 14 8 Y s s s U s s s s
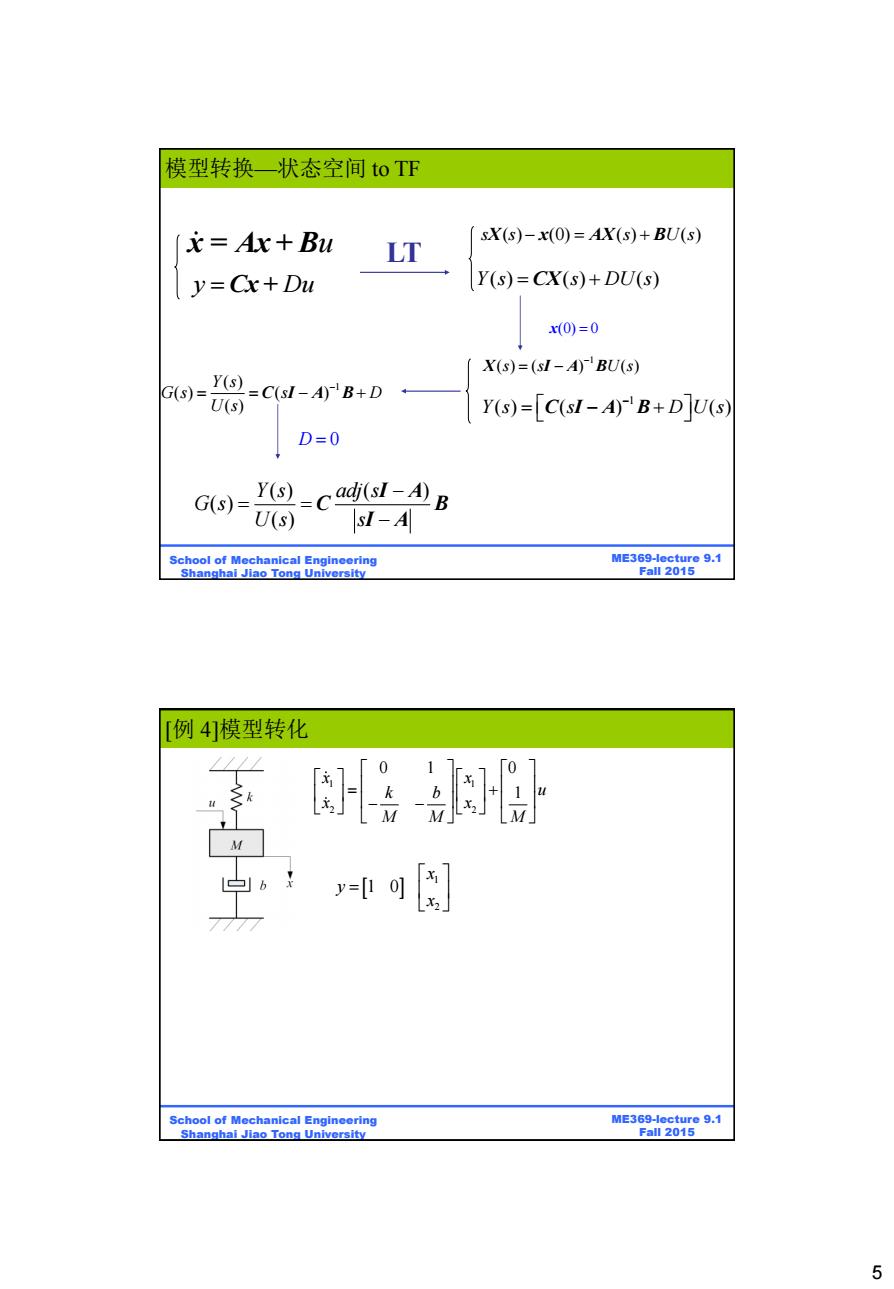
模型转换一状态空间toT℉ I文=Ax+Bu sX(s)-x(0)=AX(s)+BU(s) LT y=Cx+Du Y(s)=CX(s)+DU(s) x(0)=0 X(s)=(sI-A)BU(s) G(S)=Y()=C(SI-AB+D U(s) Ys)=「C(sl-A)B+DU(s) D=0 G(s)= Y(s)= adi(sI-A)B U(s) sI-A School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 例4]模型转化 卧 0 0 School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 5
5 ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 模型转换—状态空间 to TF x = Ax + Bu y Du Cx + LT s s s U s X x AX B ( ) (0) ( ) ( ) Y s s DU s ( ) ( ) ( ) CXx(0) 0 1 ( ) ( ) ( ) s s U s X I A B 1 Y s s D U s ( ) ( ) ( ) C I A B 1 ( ) ( ) ( ) ( ) Y s G s s D U s C I A B D 0 ( ) ( ) ( ) ( ) Y s adj s G s U s s I A C B I A ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 1 1 2 2 0 1 0 1 x x k b u x x M M M 1 2 1 0 x y x [例 4]模型转化